






近日,NUS、港中文等知名高校机构联合发布「多模态思维链」重磅综述,深度解析了280篇文献。当多模态数据与复杂任务处理需求相遇,多模态思维链(MCoT)推理技术应运而生,为人工智能发展注入新活力。
在机器人领域,以往多机器人协作导航存在集中式规划负担重、分散式规划通信成本高的问题。如今,MCoCoNav框架借助多模态思维链和视觉语言模型,让机器人能依据全局语义地图协作探索,提升导航效率和成功率,为室内服务机器人导航带来新突破 。在医疗、教育、自动驾驶等众多领域,MCoT同样表现出色。医疗场景中助力分析影像和诊断决策;教育领域用于智能辅导和个性化学习;自动驾驶时帮助车辆理解复杂路况和决策。它解锁了各领域复杂任务处理的新可能。
当前,MCoT研究呈现出蓬勃发展的态势。研究人员从改进推理机制,如设计更高效的提示策略、优化思维结构,到拓展应用场景,尝试在更多复杂领域发挥作用。未来,**MCoT有望在多模态数据融合、模型效率提升等方面取得更大突破,进一步推动人工智能向通用人工智能迈进。 **
我们精心挑选了13篇多模态思维链的相关论文,为大家提供论文写作思路。
点击【AI十八式】的主页,获取更多优质资源!
一、Multimodal Chain-of-Thought Reasoning:A Comprehensive Survey

Examples of MCoT applications in various modalities and tasks
1.研究方法
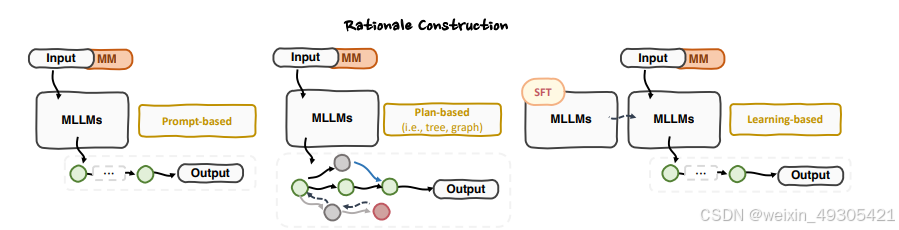
MCoT reasoning methods under different rationale construction perspectives
多模态思维链(MCoT)推理通过将思维链推理优势拓展到多模态情境,针对不同模态数据设计相应的处理策略。具体通过构建基于提示、计划和学习的推理机制,结合结构化推理、信息增强、多模态理据等方法,实现复杂任务的多步推理,并在多个领域进行应用和验证。
-
基于提示的方法:精心设计提示,在零样本或少样本设置下引导模型生成理据,常集成专家工具,提升对多模态数据的理解与推理。
-
基于计划的方法:让模型在推理过程中动态探索和优化思维,通过不同的搜索算法和决策机制,遍历多种推理路径,增强适应性和问题解决深度。
-
基于学习的方法:在训练或微调过程中嵌入理据构建,使模型学习推理技能,结合多模态输入提升推理能力。
2.多模态思维链创新点
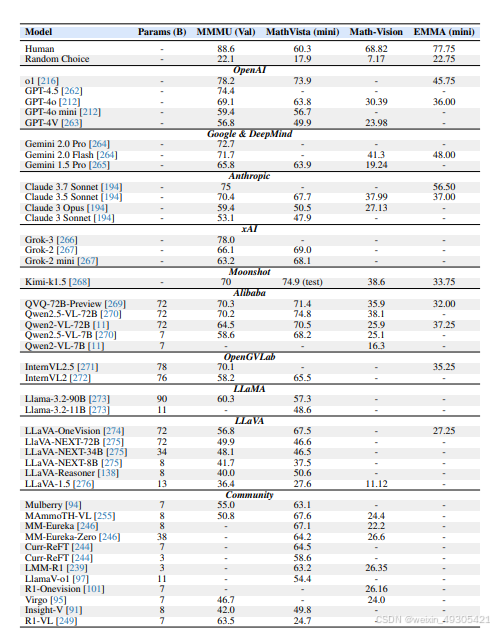
Performance comparison of MLLMs from various institutions across four benchmarks: MMMU (Val), MathVista (Mini), Math-Vision, and EMMA (Mini)
-
拓展推理模态:将思维链推理从文本拓展到图像、视频、音频、3D、表格图表等多种模态,解决不同模态复杂任务,如在图像领域用于视觉问答、目标检测,在医疗领域辅助医疗任务判断等。
-
创新推理范式:提出多种新颖的推理范式,如树状、图状和超图状思维结构,突破线性推理局限,支持分支探索、聚合优化和高阶关联推理,提高推理效率和准确性。
-
多视角优化推理:从多个视角对MCoT推理进行优化,如在结构上采用异步模态建模、定义程序阶段和自主程序阶段,增强推理过程的可控性和可解释性;通过信息增强整合专家工具和知识,提升推理质量。
-
推动应用发展:在多个重要领域取得显著应用成果,如在具身AI中增强机器人能力,在自动驾驶中提升决策和适应性,在多模态生成中克服数据驱动的局限,实现精确创新的输出。
论文链接:https://arxiv.org/pdf/2503.12605
二、Enhancing Multi-Robot Semantic Navigation Through Multimodal Chain-of-Thought Score Collaboration
Enhancing Multi-Robot Semantic Navigation Through Multimodal Chain-of-Thought Score Collaboration
1.研究方法
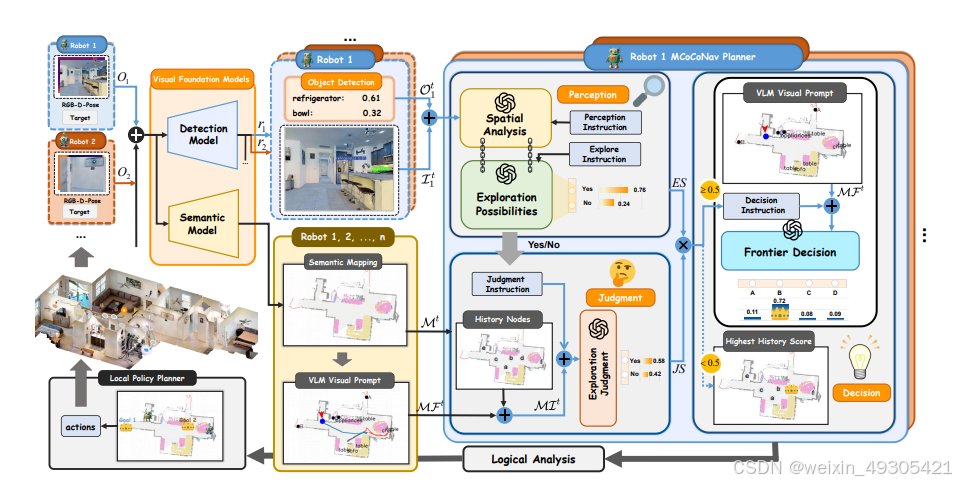
Components of MCoCoNav
该论文提出多模态思维链协同导航(MCoCoNav)框架,用于解决多机器人语义导航任务。先通过感知模块利用多模态思维链评估场景探索价值得到探索分数,判断模块结合全局语义地图等信息给出判断分数,二者综合形成水平视野分数和历史分数,决策模块依此选择长期导航目标,最后经逻辑分析和局部策略规划机器人行动。
2.论文创新点
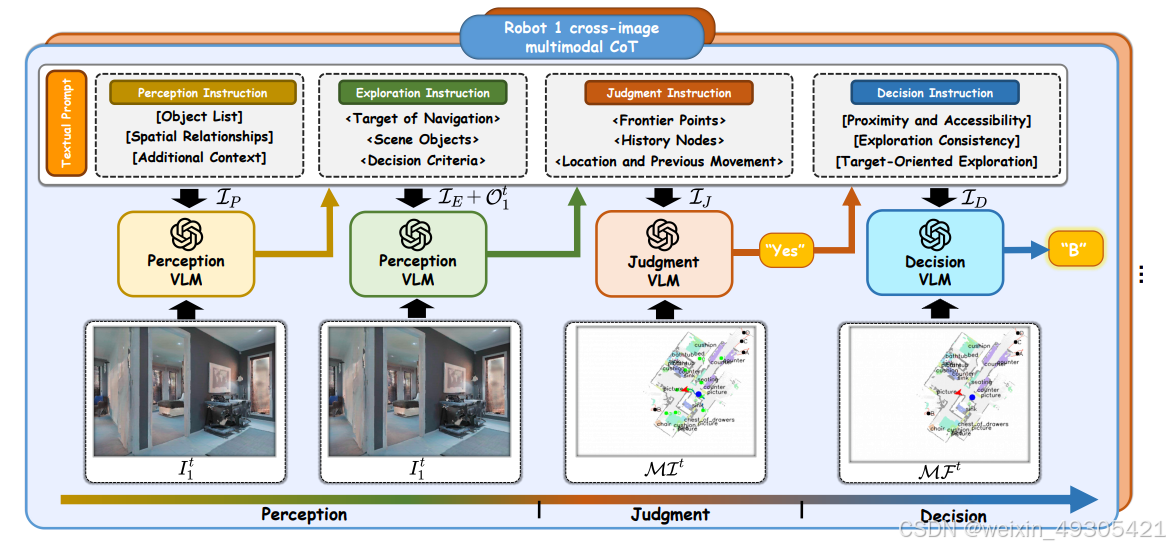
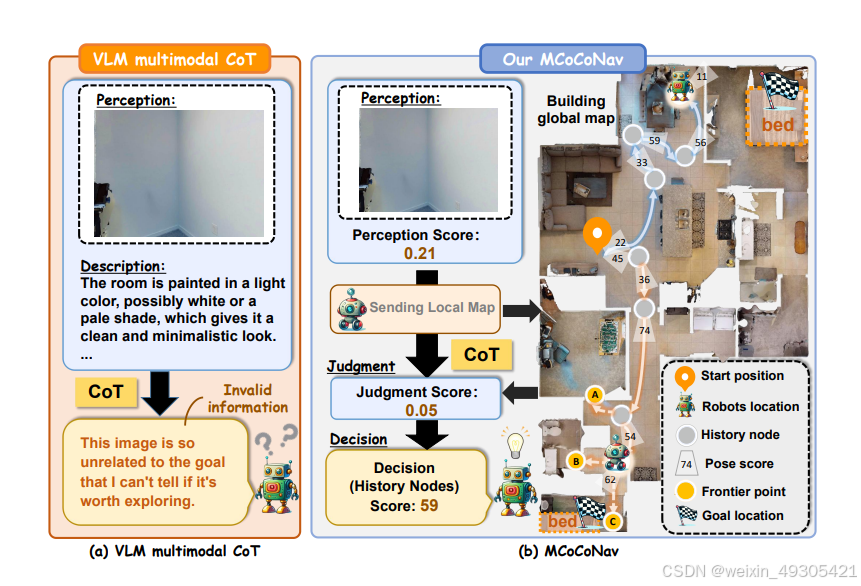
Workflow of cross-image multimodal CoT
-
创新规划框架:设计了适用于多机器人语义导航任务的规划框架,借助局部小规模视觉语言模型(VLMs)引导多机器人在未知环境中高效探索与决策,突破了传统集中式和分散式规划策略的局限。
-
促进信息共享:采用跨图像多模态思维链,帮助机器人理解不同图像的高级信息,实现机器人间低成本的语义信息共享,增强了机器人对环境的理解和导航决策的可靠性。
-
性能表现优异:在HM3D v0.2和MP3D数据集上的实验表明,MCoCoNav在导航成功率(SR)和路径长度加权成功率(SPL)等指标上优于其他多机器人导航方法,且完全零样本、可低成本本地部署。
论文链接:https://arxiv.org/pdf/2412.18292
点击【AI十八式】的主页,获取更多优质资源!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









