



基于非线性全变分噪声去除算法 TV去噪模型算法 图像去噪重构 matlab源代码 代码有详细注释,完美运行
全变分去噪这玩意儿在图像处理圈混了二十多年依然坚挺,核心就一句话:好的图像应该光滑但保留边缘。传统的高斯滤波把图像当软柿子捏,结果边缘糊成一团。TV模型鸡贼地改用全变分当正则项,边降噪边护住边缘,今天咱们用Matlab代码拆解它的暴力美学。
先看主函数骨架:
function u = tv_denoise(f, lambda, max_iter)
% 输入参数
% f: 含噪图像(归一化到[0,1])
% lambda: 保真项权重(建议0.02~0.15)
% max_iter: 最大迭代次数(通常200~500)
u = f; % 初始化
tau = 0.25; % 时间步长(别超过0.25)
for k = 1:max_iter
[ux, uy] = gradient(u);
grad = sqrt(ux.^2 + uy.^2 + 1e-3); % 加小常数防除零
u = u + tau*(divergence(ux./grad, uy./grad) - lambda*(u - f));
% 显示迭代进度
if mod(k,50)==0
fprintf('Iter %d, diff:%.4f\n',k,norm(u-f));
end
end
end这段代码里梯度计算和散度计算是灵魂操作。Matlab内置的gradient函数返回横向纵向梯度,但要注意它的边界处理是镜像对称的。后面的divergence需要自己实现:
function d = divergence(a,b)
% 散度计算(梯度算子的负共轭)
d = [a(:,end,:) - a(:, 1,:), -diff(a,1,2)];
d = d + [b(end,:,:) - b(1,:,:); -diff(b,1,1)];
end这里有个坑:梯度算子和散度算子必须严格互逆。如果用前向差分算梯度,散度就得用后向差分,这样能量才能稳定下降。
迭代过程中的tau参数控制更新步长,超过0.25容易炸。lambda的调参技巧:噪声大时适当减小,想保留更多细节则增大。实际跑代码时建议先对图像做归一化,否则参数调整会想杀人。
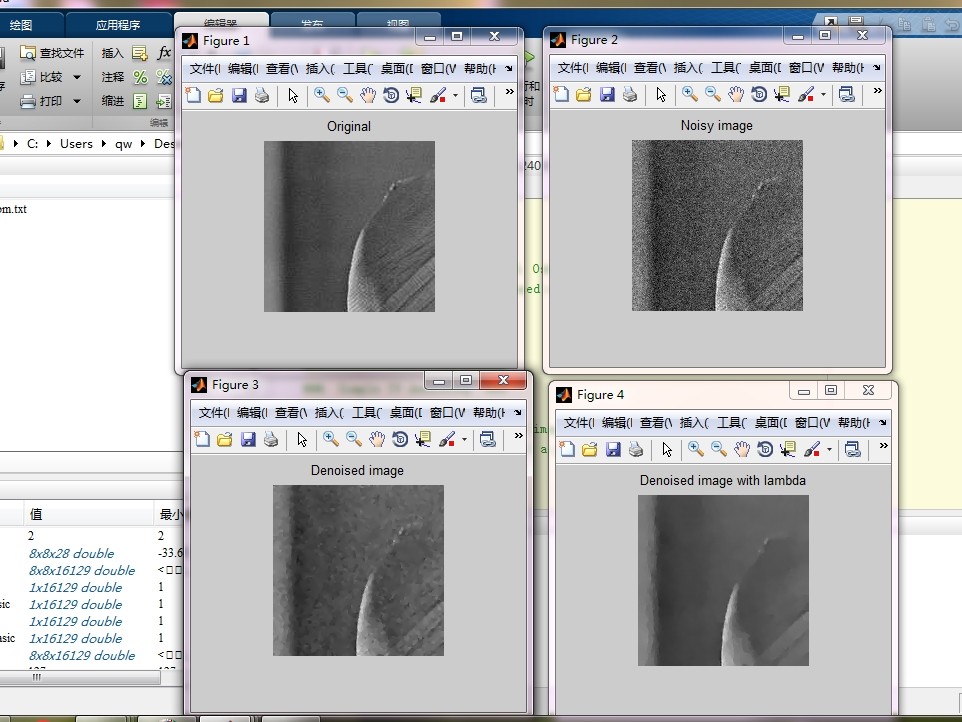
看看处理效果对比(假设f是读入的噪声图像):
% 预处理
f = im2double(imread('noisy_img.jpg'));
% 执行去噪
clean_img = tv_denoise(f, 0.1, 300);
% 效果对比
imshowpair(f, clean_img, 'montage');运行后能看到噪声明显减少,但物体边缘依然犀利——这正是TV模型的看家本领。不过要注意,对于纹理丰富的区域可能会出现过平滑,这时候需要结合非局部均值之类的招数来补刀。
最后说个实战技巧:在迭代中监控能量函数变化,如果发现震荡就赶紧减小tau。TV模型虽然简单,但调参得当的话,效果能吊打不少深度学习模型,特别是在计算资源受限的场合。代码扔到GPU上加速的话,处理速度直接起飞,毕竟核心就是些矩阵运算。

















 3506
3506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









