







 本文深入探讨了计算机视觉中的基础矩阵与本征矩阵,解析了对极约束的数学原理及其在求解相机姿态中的应用。介绍了直接线性变换法和RANSAC算法在求解基础矩阵中的作用,以及如何从中恢复相机姿态。此外,还阐述了单应矩阵的性质和求解方法,包括直接线性变换和RANSAC估计,用于实现不同视角间的像素转换。这些理论与方法是理解和实现立体视觉及图像匹配的关键。
本文深入探讨了计算机视觉中的基础矩阵与本征矩阵,解析了对极约束的数学原理及其在求解相机姿态中的应用。介绍了直接线性变换法和RANSAC算法在求解基础矩阵中的作用,以及如何从中恢复相机姿态。此外,还阐述了单应矩阵的性质和求解方法,包括直接线性变换和RANSAC估计,用于实现不同视角间的像素转换。这些理论与方法是理解和实现立体视觉及图像匹配的关键。
文章目录
对极约束
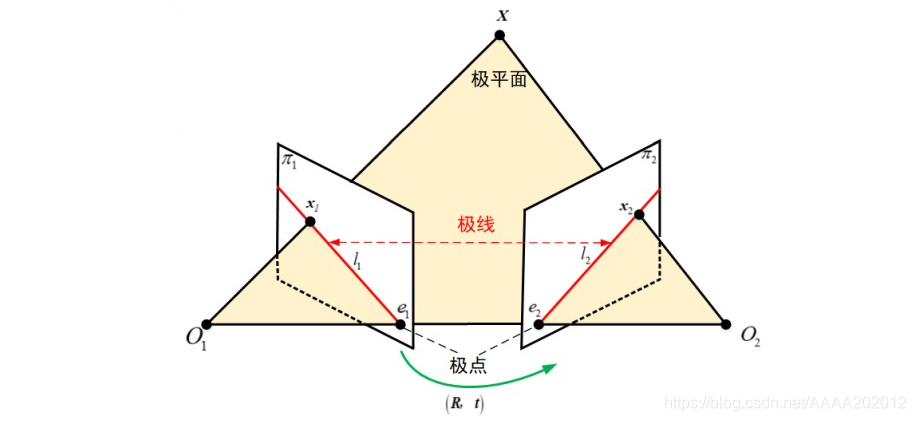
如图所示,描述的是空间中的一点在左右两个相机中成像,空间点在两个相机的成像点通过外参矩阵R,t建立了一个等式关系,或者称为一种约束关系,这个约束就叫做对极约束。以下两式描述了两个像素坐标x1 和x2的关系。

公式推导如下图:
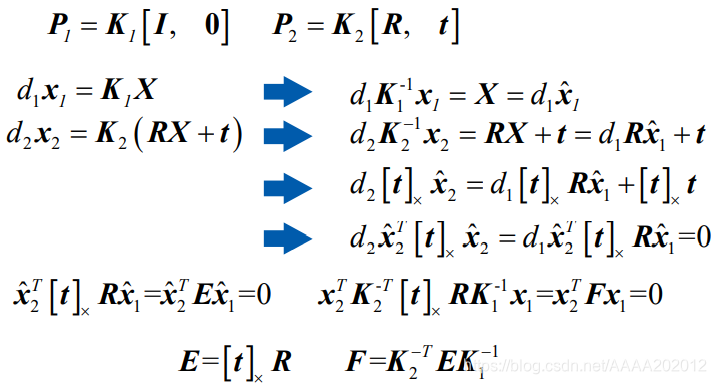
基础矩阵F
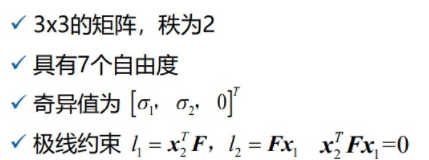
基础矩阵性质
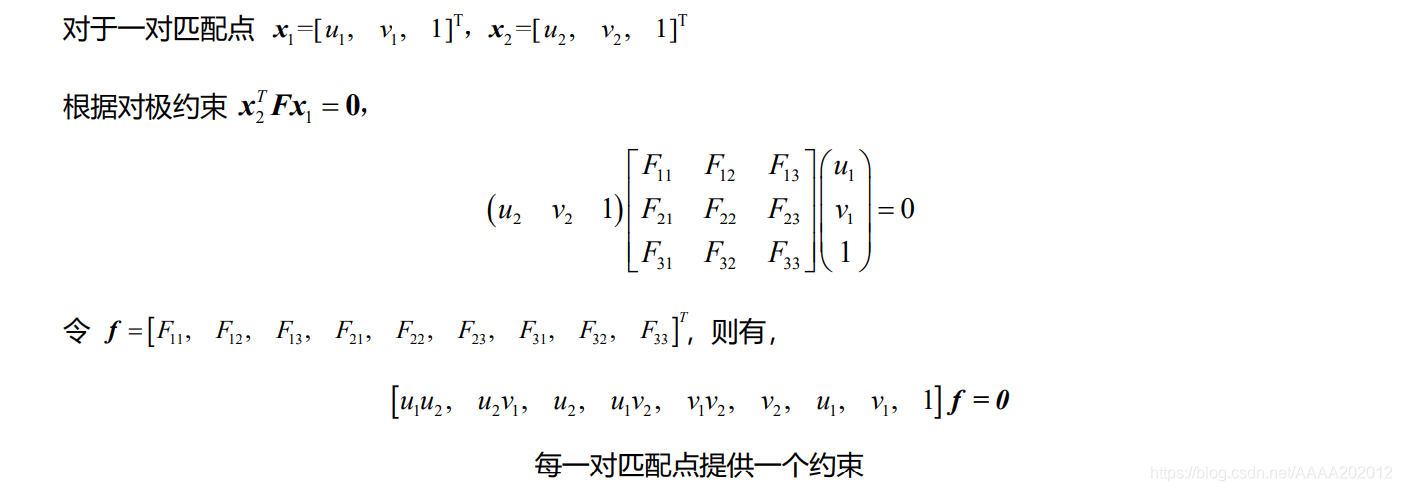
基础矩阵求解方法
基础矩阵的求解主要有两种方法:1.直接线性变换法;2. 基于RANSAC的鲁棒方法求得。
直接线性变换法
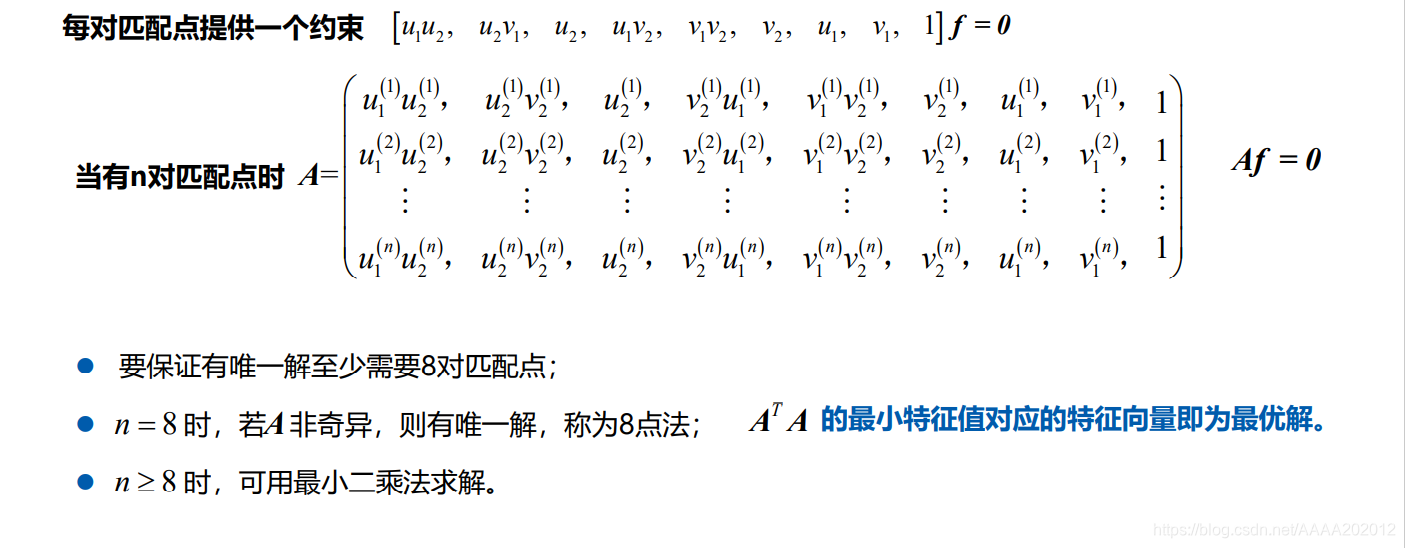
基于RANSAC的鲁棒方法
算法流程为:
- 随机采样8对匹配点(x1(n) ,x2(n));
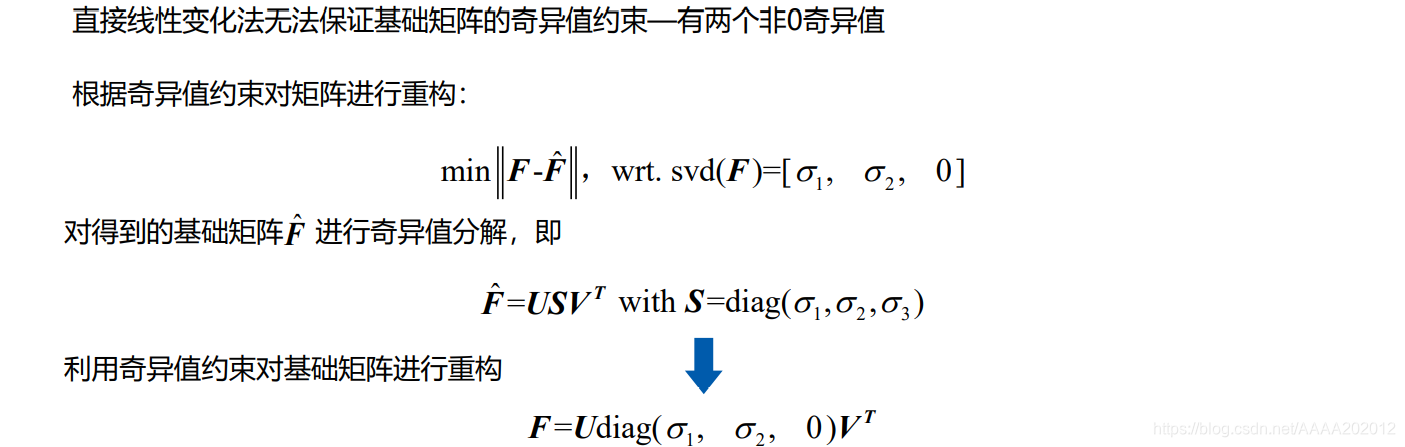
- 8点法求解基础矩阵 F ^ \widehat{F} F ;
- 奇异值约束获取基础矩阵F;
- 计算误差,并统计内点个数;
- 重复上述过程,选择内点数最多的结果;
- 对所有的内点执行2,3,重新计算F。
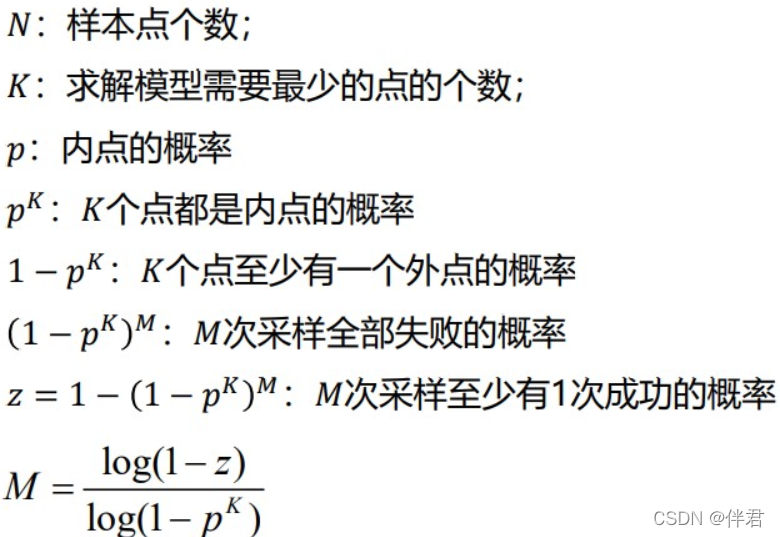
其中,采样次数计算满足下式:
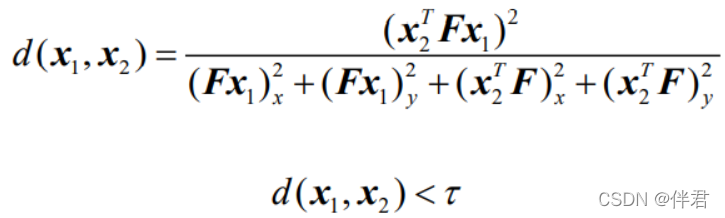
内点判断标准满足下式:
本征矩阵E
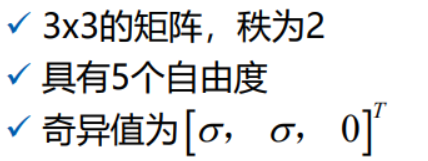
本征矩阵性质
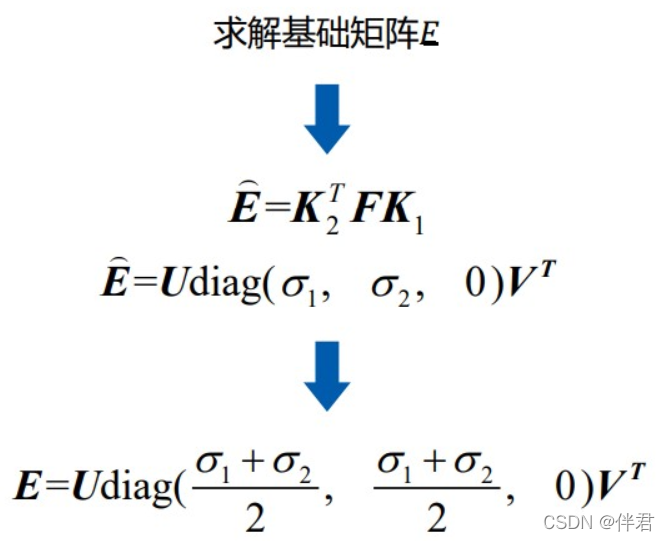
本征矩阵求解
从本征矩阵中恢复相机姿态
本质矩阵有良好的性质,它的奇异值是[σ,σ,0]的形式,可以通过SVD分解得到R和t。若E的SVD分解为E = U Σ VT ,其中Σ = diag(σ,σ,0),则R和t的可能结果如下:
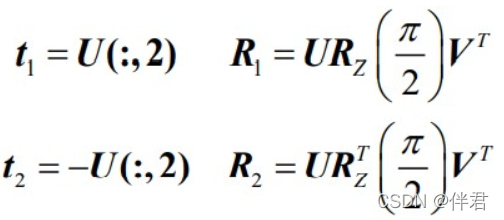
其中
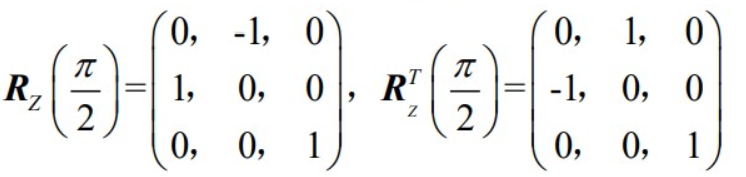
一共存在四组可能的R,t组合,如下图所示:

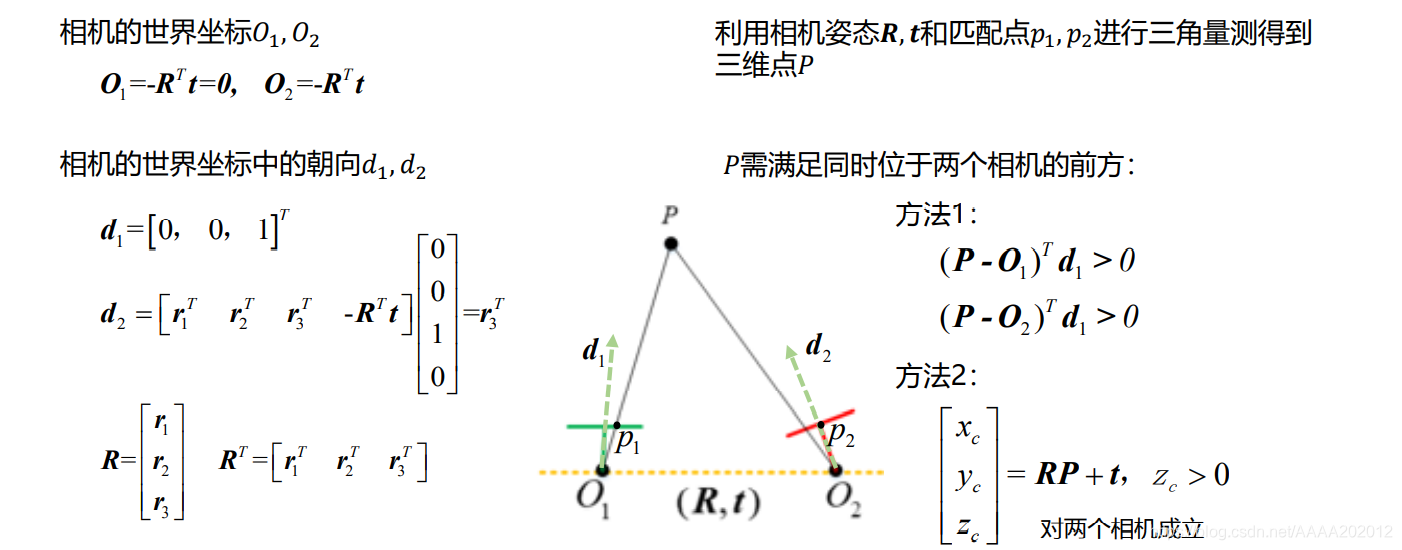
那么如何选择正确的相机姿态呢:需要让空间中一点同时位于两个相机的前方。
单应矩阵H
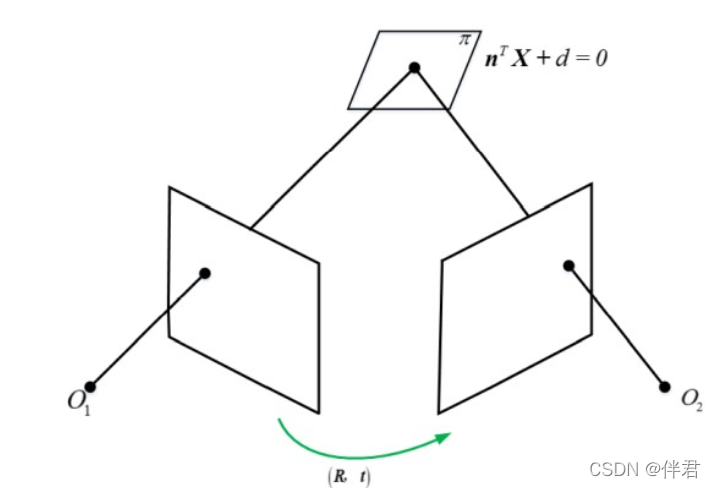
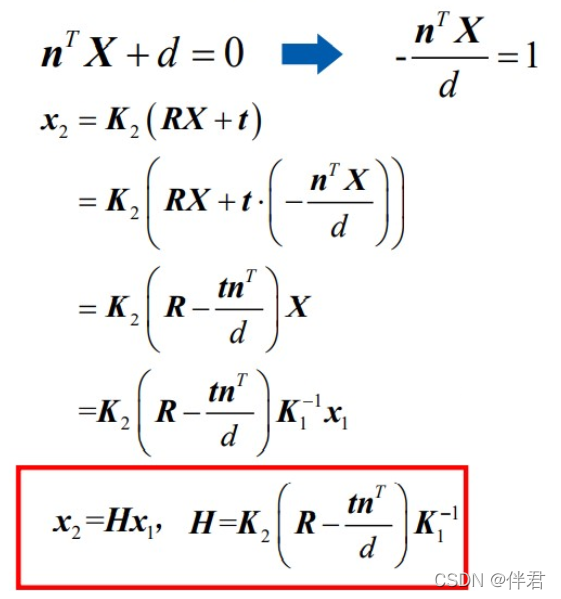
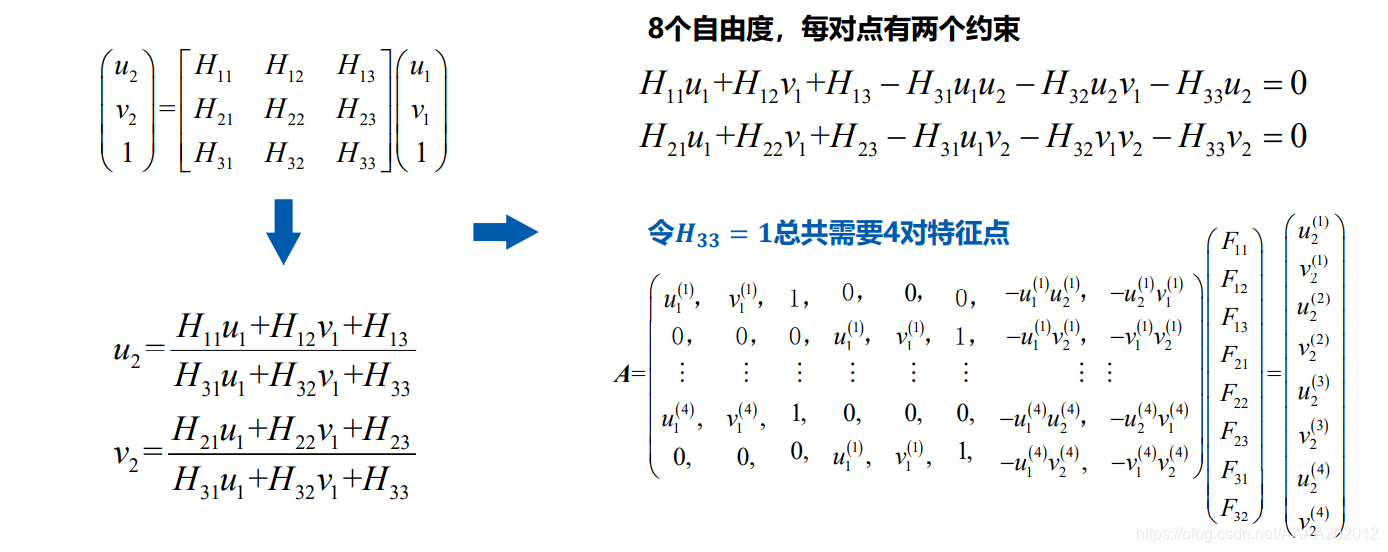
基础矩阵和本征矩阵是一种坐标之间的内在约束式,并不是两个像素之间的相互转换关系。而单应矩阵可以将不同相机对应点像素坐标进行转换,条件是当空间中特征点位于一平面上。如下图:
单应矩阵性质
单应矩阵求解
直接线性变换求解单应矩阵
RANSAC法估计单应矩阵
算法流程:
- 随机采样4对匹配点(x1(n) ,x2(n));
- 4点法求解基础矩阵H;
- 计算误差,并统计内点个数;
- 重复上述过程,选择内点数最多的结果;
- 对所有内点执行3,4,重新计算H
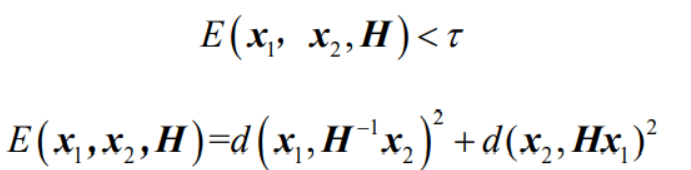
其中,内点判断标准为:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









