






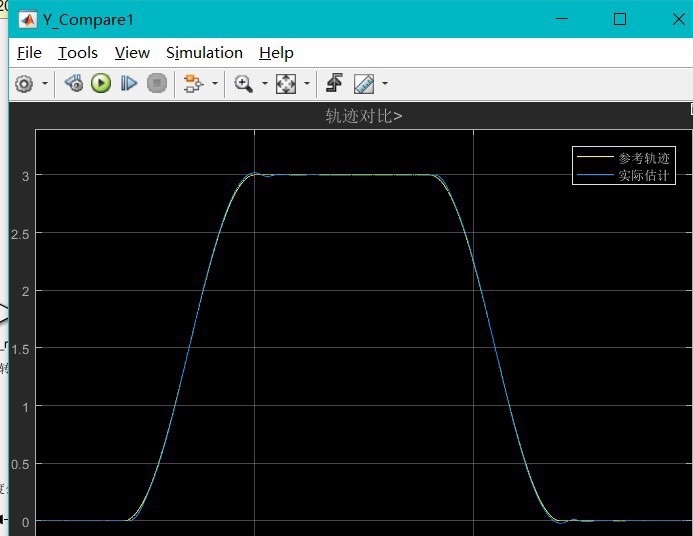
基于pid控制的超车轨迹跟踪,能够很好的跟踪期望轨迹。
有详细的说明文档
ID:5530682075434178
想剁手书屋14
随着科技的不断发展和计算机技术的持续进步,车辆控制系统逐渐走向智能化和自动化的方向。在现代车辆控制系统中,超车轨迹跟踪是一个非常关键和具有挑战性的问题。超车轨迹跟踪的目标是让车辆按照预定的轨迹进行行驶,以实现更高的安全性和行驶效果。
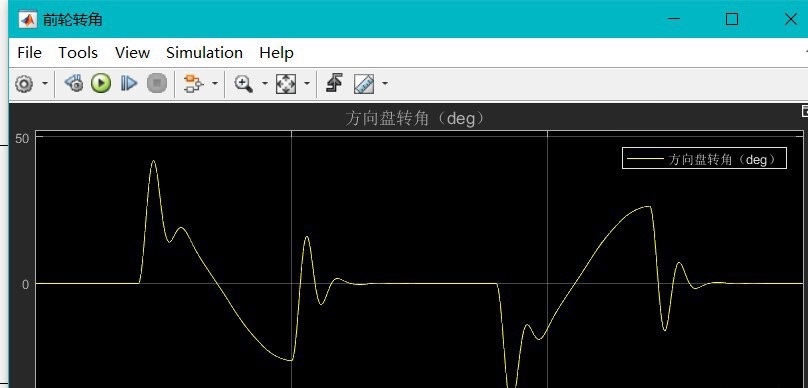
基于PID控制的超车轨迹跟踪是一种常见的控制方法。PID控制器是一种经典的反馈控制器,通过将系统当前状态与期望状态进行比较,并根据误差大小调整控制输出,使系统尽可能接近期望状态。在超车轨迹跟踪中,PID控制器能够根据车辆当前位置和期望轨迹来调整车辆的转向角度和速度,以实现精确的轨迹跟踪效果。
在实现基于PID控制的超车轨迹跟踪时,需要注意以下几个关键问题。首先是期望轨迹的生成问题。期望轨迹是指车辆需要按照的理想轨迹,通常可以通过预先规划或者根据特定的行驶目标生成。生成期望轨迹的方法可以是基于数学模型的规划方法,也可以是基于实时地图和传感器信息的优化方法。其次是误差计算与控制策略问题。在超车轨迹跟踪过程中,需要根据车辆当前位置与期望轨迹的差异来计算误差,并将误差作为PID控制器的输入,通过调整转向角度和速度来减小误差。最后是PID参数的调整问题。PID控制器的效果受到PID参数的影响,合理的参数选择能够提高系统的稳定性和鲁棒性。
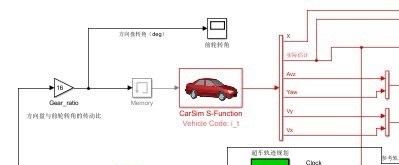
在设计基于PID控制的超车轨迹跟踪系统时,需要有详细的说明文档来指导实施人员的操作。说明文档应包含系统的整体架构和设计原理,包括期望轨迹生成方法、误差计算与控制策略、PID参数的选择和调整方法等。此外,说明文档还应包含具体的实施步骤和操作指南,以及系统的测试和调试方法。通过详细的说明文档,可以帮助实施人员更好地理解和掌握系统的工作原理和操作方法,提高系统的可靠性和稳定性。
总之,基于PID控制的超车轨迹跟踪能够很好地跟踪期望轨迹,实现车辆的精确导航和行驶控制。通过详细的说明文档,能够指导实施人员进行系统的实施和操作,并提供系统稳定性和鲁棒性的保证。未来,随着技术的不断革新和发展,超车轨迹跟踪系统将进一步优化和完善,为车辆行驶的安全性和效率性提供更好的保障。
相关的代码,程序地址如下:http://fansik.cn/682075434178.html
















 371
371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









