










硬件准备
ADSP-21489EVB:ADI 21489 DSP的开发板
AD-HP530ICE:ADI DSP通用仿真器

软件准备
Visual DSP++
算法功能
实现全通滤波功能,声音信号经过该滤波器以后频谱幅度不变,仅改变相位,即产生延时。
原理简介
下图为全通滤波器的一种网络结构:
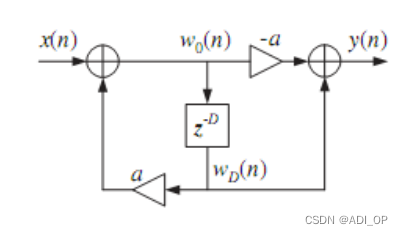
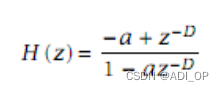
其差分方程为:

系统函数:
资源占用(MIPS, Memory requirement)
Memory: 数据段(段名 AllPassFilterC_dmda)
(D + 2)words (字长 32bits)
D 指延时线长度
代码段(段名 AllPassFilterC_pmco)
0x71words (字长 48bits)
MFLOPS(处理 1 个输入数据): AllPassFilterC 函数,0.0007
相关函数
函数一:void InitAllPassFilterC( float *DlyBuf, int *BufIndex, int
BufSize );
1.函数说明:初始化函数,将延时线的数据置零。
2.输入参数:
*DlyBuf 延时线指针
*BufIndex 对延时线进行数据操作的索引值
BufSize 延时线长度
3.输出参数:无
4.返回值:无。
函数二:int AllPassFilterC(int *in, int *out, float *DlyBuf, int *BufIndex,
float *Gain, int DelayNum);
1.函数说明:对单声道的输入,进行全通滤波处理。
2.输入参数:
in 输入数据指针。
*in 为单声道数据;
数据范围:int 类型表示的范围
DlyBuf 延时线指针。
Gain 增益系数
数据范围: 0 ≤ *Gain < 1
DelayNum 延时线长度。
数据范围:在存储空间允许的范围内根据需要设定;
3.输出参数:
out 输出数据指针。
*out 为单声道的输出数据;
数据范围:int 类型表示的范围
4.返回值: 0 为正常;1 增益参数超范围
应用举例
首先将 AllPassFilterC.dlb, AllPassFilterC.h 两个文件拷贝到自己的工程目录下,然后将它 们 添 加 到 工 程 中 ; 然 后 在 LDF 文 件 中 给 数 据 段 AllPassFilterC_dmda 、 程 序 段AllPassFilterC_pmco 分配空间,接下来再写相关代码。
#include “AllPassFilterC.h”
/******************************************************************************
- 调用 AllPassFilterC.dlb 库函数需定义的参数
*/
#define D 4800 // 定义延时缓冲区大小 TD = D/fs = 4800/48000 = 0.1 sec */
#pragma section (“AllPassFilterC_dmda”)
int DelayBufIndex; // 往延时缓冲区写数据的索引值
#pragma section (“AllPassFilterC_dmda”)
float w[D + 1]; // 延时缓冲区
#pragma section (“AllPassFilterC_dmda”)
float GainCoef = 0.5; // 增益系数
//
// 第一次调用延时函数的标志
int FirstAllPassFilterCFlag = 1;
// 输入输出数据的临时变量
int InputLR;
int OutputLR[2];
int InputData;
int OutputData;
// 第一次调用全通滤波函数之前先做初始化工作
if (FirstAllPassFilterCFlag)
{
InitAllPassFilterC( w, &DelayBufIndex, D);
FirstAllPassFilterCFlag = 0;
}
for (i=0; i<NUM_SAMPLES; i++)
{
//取左声道数据
InputData = (block_ptr+2i); // block_ptr 是 A/D D/A 收发数据的指针
//对输入数据进行 Stero Chorus 处理
ReturnValue = AllPassFilterC(&InputData, &OutputData, w, &DelayBufIndex,
&GainCoef, D);
//将处理后的输出数据传给 D/A
(block_ptr+2i) = OutputData;
}















 9408
9408











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











