






基于模型预测控制(mpc)的车辆换道,车辆轨迹跟踪,换道轨迹为五次多项式,matlab与carsim联防控制
YID:1550680497837661
一無所有`
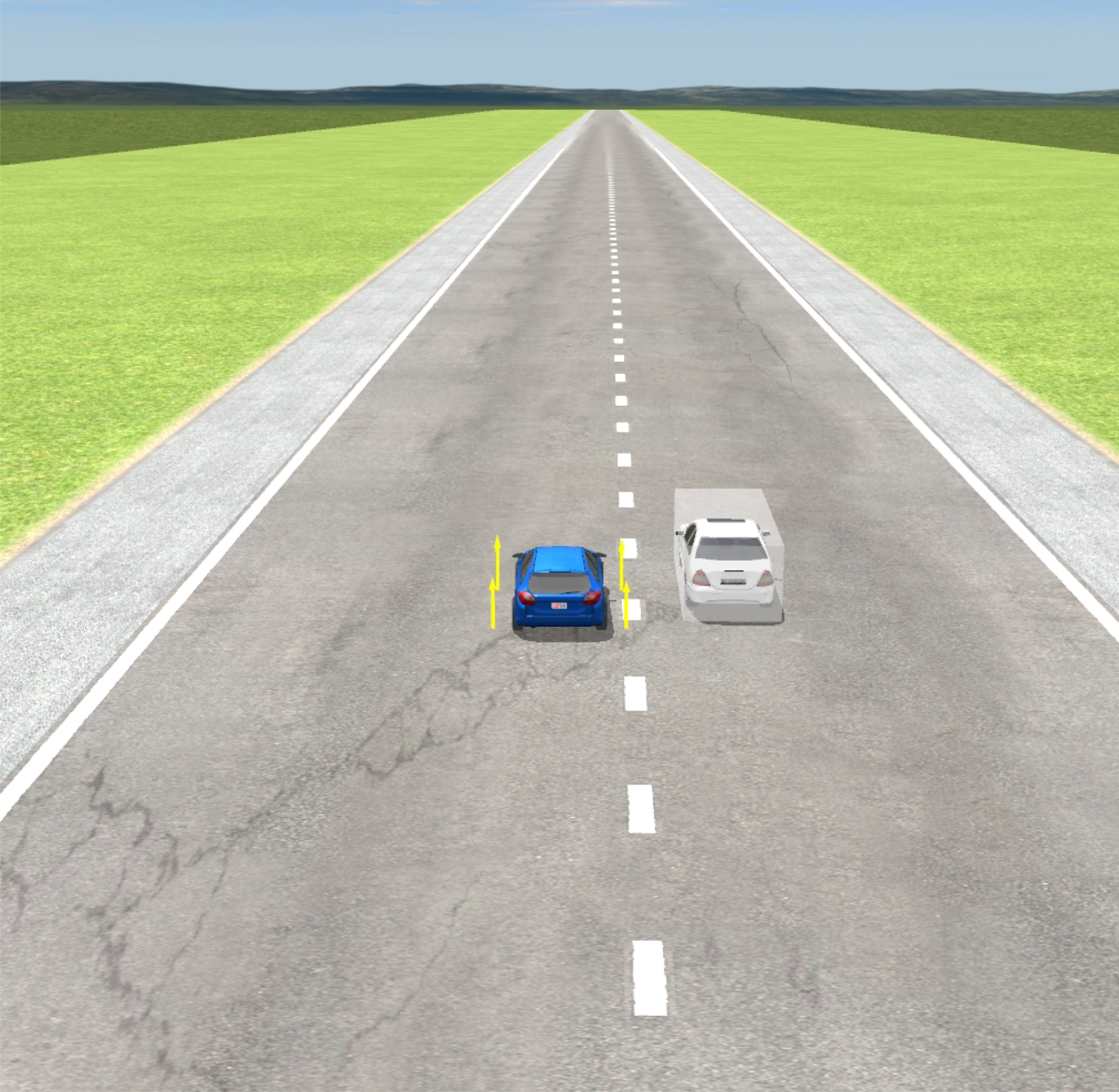
基于模型预测控制(MPC)的车辆换道和车辆轨迹跟踪一直是自动驾驶领域的关键问题之一。在实际道路环境中,车辆换道行为的安全性和有效性对于交通系统的顺畅运行和交通参与者的安全至关重要。为了实现车辆换道行为的高效和安全,采用了基于五次多项式的换道轨迹生成方法,并结合Matlab与CarSim进行联合控制。
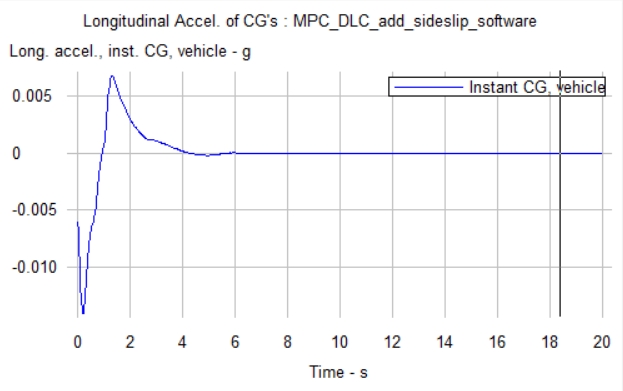
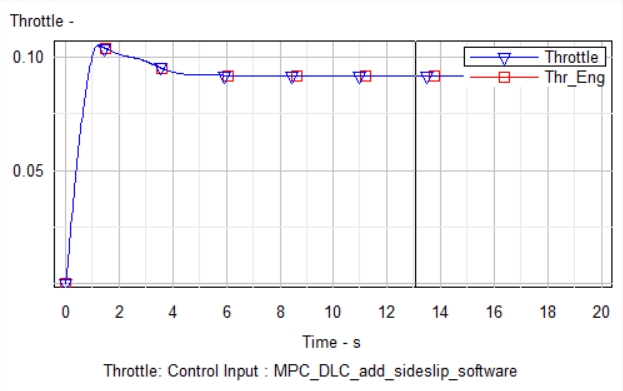
首先,我们需要了解什么是模型预测控制(MPC)。MPC是一种优化控制策略,它通过建立车辆动力学模型来预测未来一段时间内的车辆行为,并优化当前的控制输入,以使车辆满足预设的性能指标。MPC在自动驾驶领域中被广泛应用,可以用于各种车辆行为的控制,包括换道和轨迹跟踪。
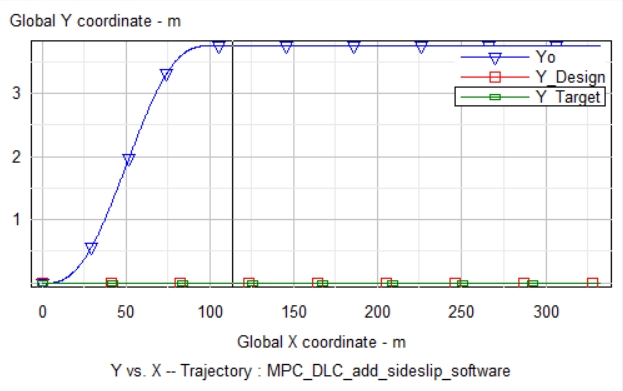
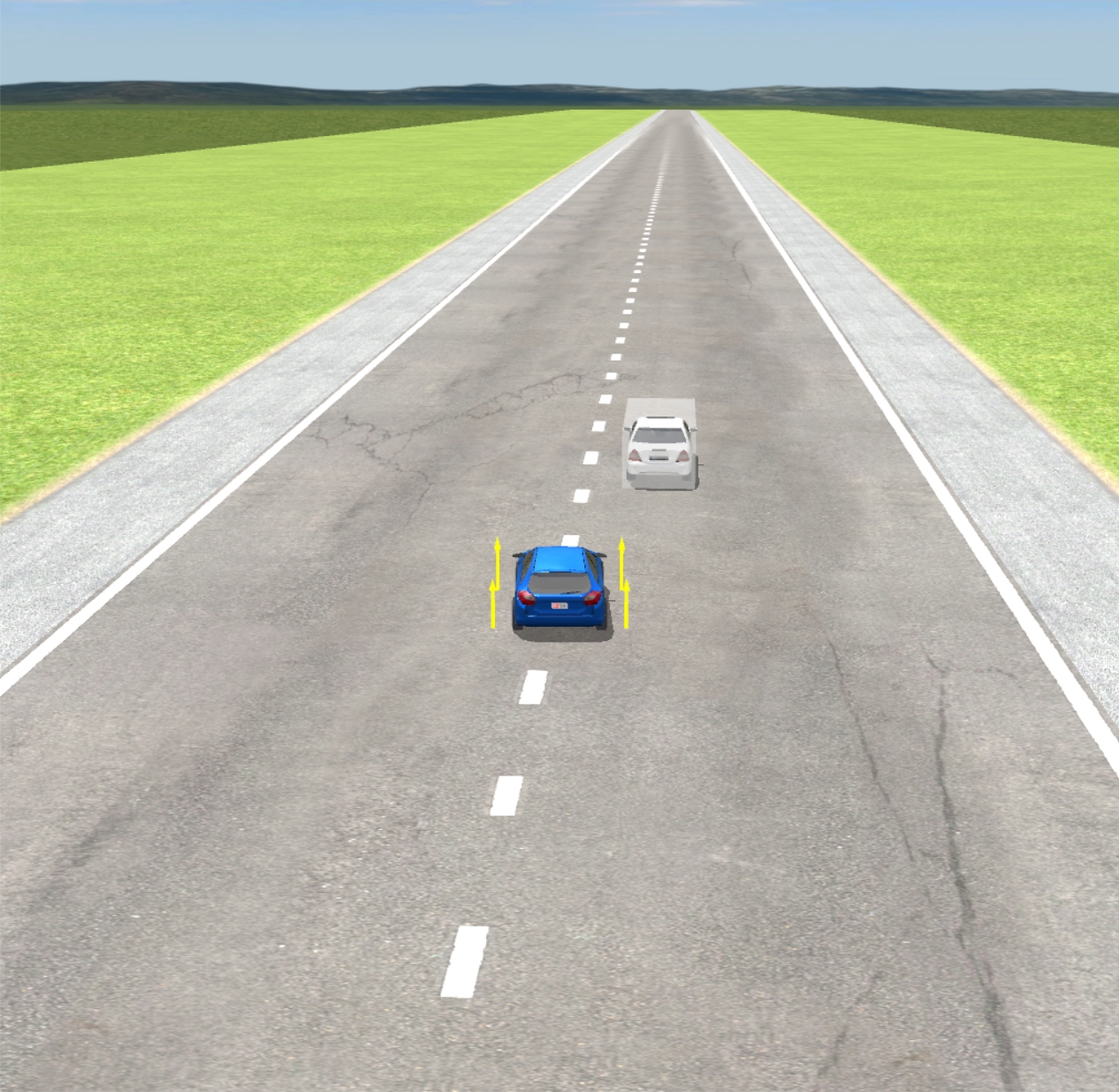
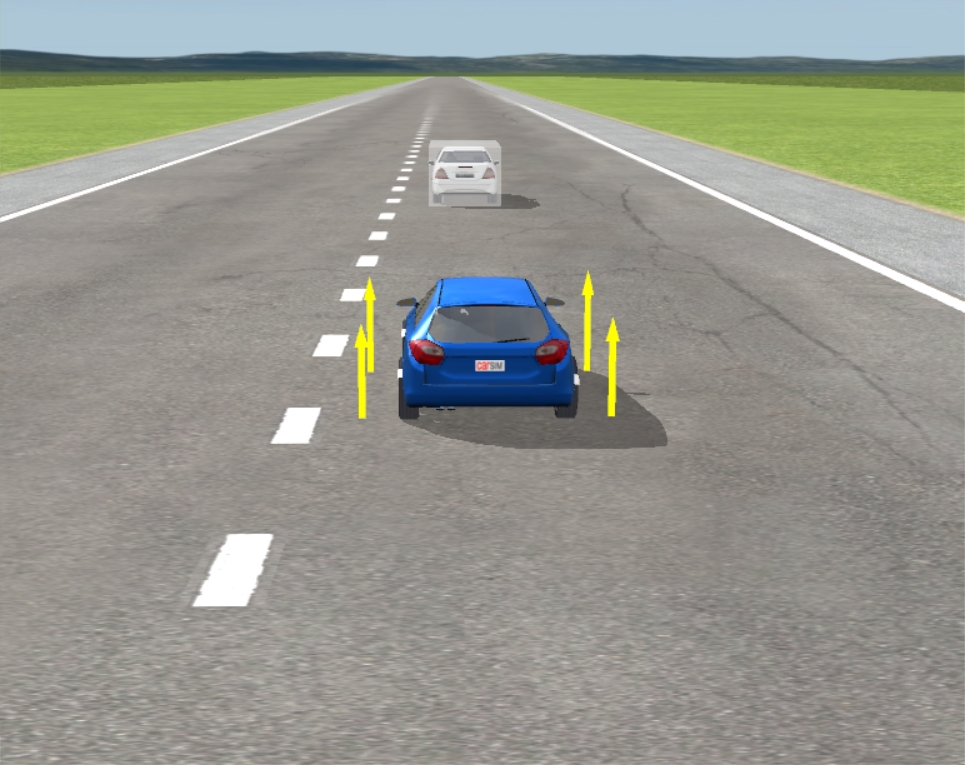
对于车辆换道行为,我们采用了基于五次多项式的换道轨迹生成方法。五次多项式可以灵活地描述车辆换道过程中的曲线变化,通过调节多项式的系数可以实现不同曲线形状的生成。换道轨迹的生成需要考虑诸多因素,如车辆速度、车道宽度、前车距离等。基于这些因素,我们可以通过优化问题来得到最优的换道轨迹。
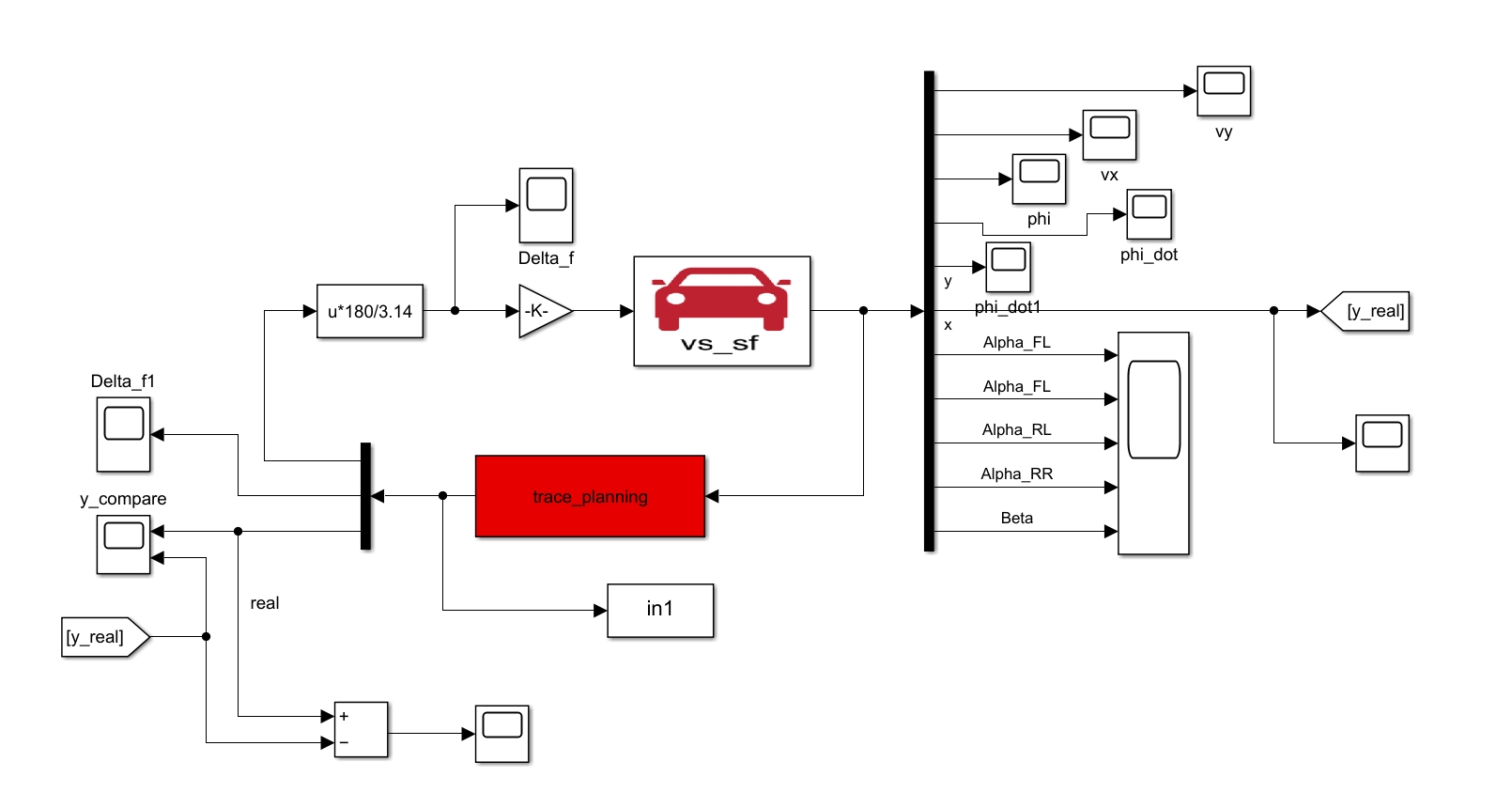
在换道轨迹生成的基础上,我们将Matlab与CarSim进行联合控制。Matlab提供了强大的数学建模和仿真功能,可以用于生成车辆换道轨迹的引导信号,并将其与实际车辆的状态进行比较。CarSim是一款车辆动力学仿真软件,可以模拟车辆在不同道路条件下的运动。Matlab与CarSim的联合控制可以使我们更加准确地评估换道轨迹的性能,并对控制策略进行优化。
在实际应用中,基于模型预测控制的车辆换道和轨迹跟踪可以提供更加安全和高效的交通系统。通过优化换道轨迹的生成和控制策略的设计,可以使车辆在换道过程中更好地适应道路条件和交通流量,减少交通事故的发生概率,并提高道路的通行能力。
综上所述,基于模型预测控制的车辆换道和车辆轨迹跟踪是实现自动驾驶的关键技术之一。通过采用基于五次多项式的换道轨迹生成方法,并结合Matlab与CarSim进行联合控制,可以实现车辆在换道过程中的高效和安全。这一方法在实际道路环境中具有较强的可行性和可靠性,并且可以为未来自动驾驶交通系统的发展提供重要的技术支持。
需要注意的是,在实际应用中还需要考虑到其他因素的影响,如车辆间的通信和协同控制、交通信号灯的配合等。未来的研究还可以进一步完善这些方面,以实现更加智能和高效的自动驾驶交通系统。
相关的代码,程序地址如下:http://coupd.cn/680497837661.html


















 5486
5486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









