







特征提取和匹配
(1)使用OpenCV提取和匹配
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include "opencv2/imgcodecs/legacy/constants_c.h"
using namespace std;
using namespace cv;
int main(int argc, char **argv) {
//-- 读取图像
Mat img_1 = imread("../1.png");
Mat img_2 = imread("../2.png");
//-- 初始化
std::vector<KeyPoint> keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// Ptr<FeatureDetector> detector = FeatureDetector::create(detector_name);
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create(descriptor_name);
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
Mat outimg1;
drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("ORB特征点", outimg1);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配, 使用 Hamming 距离
vector<DMatch> matches;
//BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, matches);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
// 仅供娱乐的写法
min_dist = min_element(matches.begin(), matches.end(),
[](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; })->distance;
max_dist = max_element(matches.begin(), matches.end(),
[](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; })->distance;
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
std::vector<DMatch> good_matches;
for (int i = 0; i < descriptors_1.rows; i++) {
if (matches[i].distance <= max(2 * min_dist, 30.0)) {
good_matches.push_back(matches[i]);
}
}
//-- 第五步:绘制匹配结果
Mat img_match;
Mat img_goodmatch;
drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match);
drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch);
imshow("所有匹配点对", img_match);
imshow("优化后匹配点对", img_goodmatch);
waitKey(0);
return 0;
}
0初始化
std::vector<KeyPoint> keypoints_1, keypoints_2; //a
Mat descriptors_1, descriptors_2; //b
Ptr<FeatureDetector> detector = ORB::create(); //c
Ptr<DescriptorExtractor> descriptor = ORB::create();
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
a. opencv提供了KeyPoint数据类型,具体表示特征点:
class KeyPoint
{
Point2f pt; //特征点坐标
float size; //特征点邻域直径
float angle; //特征点的方向,值为0~360,负值表示不使用
float response; //特征点的响应强度,代表了该点是特征点的稳健度,可以用于后续处理中特征点排序
int octave; //特征点所在的图像金字塔的层组
int class_id; //用于聚类的id
}
b. cv::Mat是opencv用来记录大型数组的主要类型
c. Ptr:智能指针,定义了一个名为detector的指针
FeatureDetector:特征检测器
Ptr<FeatureDetector> detector = FeatureDetector::create(“ORB”);
此处写法为opencv2写法(感觉更好理解哈哈),查阅资料:
OpenCV 2.4.3提供了10种特征检测方法:
- “FAST” – FastFeatureDetector
- “STAR” – StarFeatureDetector
- “SIFT” – SIFT (nonfree module)
- “SURF” – SURF (nonfree module)
- “ORB” – ORB
- “MSER” – MSER
- “GFTT” – GoodFeaturesToTrackDetector
- “HARRIS” – GoodFeaturesToTrackDetector with Harris detector enabled
- “Dense” – DenseFeatureDetector
- “SimpleBlob” – SimpleBlobDetector
DescriptorExtractor:描述提取器?
上述两种什么器应该分别对应关键点与描述子。
DescriptorMatcher:描述匹配器,将生成的关键点与描述子匹配起来,同时选择匹配方法。
enum MatcherType
{
FLANNBASED = 1,
BRUTEFORCE = 2, //暴力匹配法L2范数距离 欧氏距离
BRUTEFORCE_L1 = 3, //绝对值之差
BRUTEFORCE_HAMMING = 4, //汉明距离
BRUTEFORCE_HAMMINGLUT = 5, //汉明距离平方
BRUTEFORCE_SL2 = 6
};
DescriptorMatcher:特征匹配器
1提取特征点
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
Mat outimg1;
drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("ORB特征点", outimg1);
2.匹配特征点
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配, 使用 Hamming 距离
vector<DMatch> matches;
//BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, matches);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
std::vector<DMatch> good_matches;
for (int i = 0; i < descriptors_1.rows; i++) {
if (matches[i].distance <= max(2 * min_dist, 30.0)) {
good_matches.push_back(matches[i]);
}
}
暴力匹配:对每一个特征点 x t m x_t^m xtm 与所以的 x t + 1 n x_{t+1}^n xt+1n 测量描述子的距离,然后排序,取最近的一个作为匹配点。
match()函数第三个参数matches是一个容器,需要提取出匹配的距离结果,存储的距离为这个特征点计算得到的最近的距离。
3.绘制匹配结果
//-- 第五步:绘制匹配结果
Mat img_match;
Mat img_goodmatch;
drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match);
drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch);
imshow("所有匹配点对", img_match);
imshow("优化后匹配点对", img_goodmatch);
waitKey(0);
使用opencv提供的绘制匹配结果的函数。记住就行了哈哈
(2)作业2 ORB特征点
2.00 算法分析
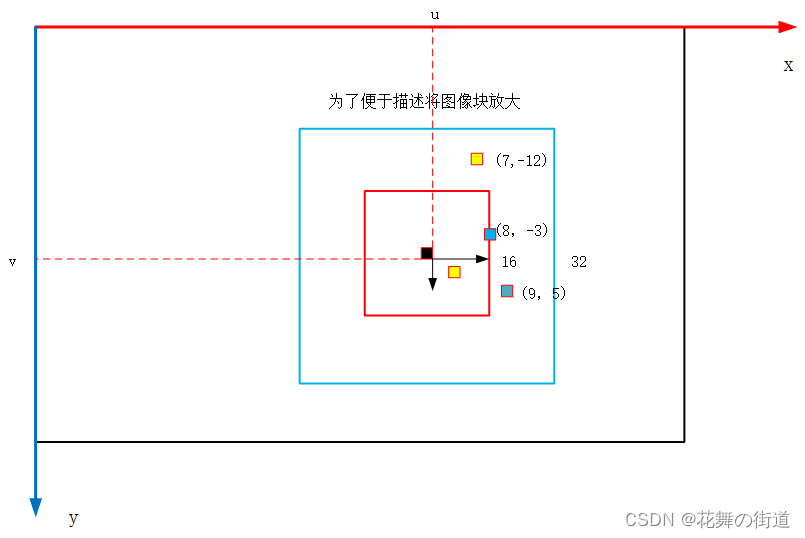
(1)上图黑框表示的是一张图片,蓝框表示ORB计算BRIEF描述子时所选取的图像块区域,红框ORB检测Oriented FAST关键点时选取的图像块区域,中间黑色点是检测到的关键点。
(2)选取的图像块需要保证蓝框在图像相片的范围内不能超出,需要检查边界,检查大的描述子区域便足够。
(3)重点在描述子的计算上,已知关键点(u,v)以及该点的转角 θ \theta θ (灰度质心法计算所的)。
BRIEF是一种二进制描述子,位数可以选择128位或256位,现选择256位的描述子 d = [ d 1 , d 2 ⋯ d 256 ] d = [d_1,d_2 \cdots d_{256}] d=[d1,d2⋯d256],如何得到 d i d_i di 呢?方法如下:
在关键点周围选取256对点,程序中已给出如下,前面两个数是一个点,后面是一个,前两对点在图上表示如图蓝点与黄点。每一对点均按照 θ \theta θ 旋转,可以得到一对新的点,比较这两个新点的像素值,前者大于后者d为0,前者小于后者d为1。
int ORB_pattern[256 * 4] = {
8, -3, 9, 5 /*mean (0), correlation (0)*/,
4, 2, 7, -12 /*mean (1.12461e-05), correlation (0.0437584)*/,
-11, 9, -8, 2 /*mean (3.37382e-05), correlation (0.0617409)*/,
7, -12, 12, -13 /*mean (5.62303e-05), correlation (0.0636977)*/,
......
}
(4)两张图片特征点的匹配
经过上述步骤我们已经得到两张图片的特征点,关键点与描述子分别储存在vector容器中。对于两组描述子P,Q,P中的每一个描述子计算与Q中描述子的距离,将两个描述子每一位异或运算然后得数相加得到距离称为汉明距离。使用DMatch用来储存匹配信息。
2.01 主程序
int main(int argc, char **argv) {
// 1.load image
cv::Mat first_image = cv::imread(first_file, 0); // load grayscale image
cv::Mat second_image = cv::imread(second_file, 0); // load grayscale image
// plot the image
cv::imshow("first image", first_image);
cv::imshow("second image", second_image);
cv::waitKey(0);
// 2.提取 FAST 关键点,但是不具有旋转不变性
vector<cv::KeyPoint> keypoints;
cv::FAST(first_image, keypoints, 40);
cout << "keypoints: " << keypoints.size() << endl;
//加入灰度质心角后称为 Oriented FAST关键点
computeAngle(first_image, keypoints); //即将keypoints更新了
vector<cv::KeyPoint> keypoints2;
cv::FAST(second_image, keypoints2, 40);
cout << "keypoints2: " << keypoints2.size() << endl;
computeAngle(second_image, keypoints2);
// 3.计算描述子
vector<DescType> descriptors;
vector<DescType> descriptors2;
computeORBDesc(first_image, keypoints, descriptors);
computeORBDesc(second_image, keypoints2, descriptors2);
// plot the keypoints
cv::Mat image_show;
cv::drawKeypoints(first_image, keypoints, image_show, cv::Scalar::all(-1),
cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
cv::imshow("features", image_show);
cv::imwrite("feat1.png", image_show);
cv::waitKey(0);
// 4.暴力匹配
vector<cv::DMatch> matches;
bfMatch(descriptors, descriptors2, matches);
cout << "matches: " << matches.size() << endl;
// plot the matches
cv::drawMatches(first_image, keypoints, second_image, keypoints2, matches, image_show);
cv::imshow("matches", image_show);
cv::imwrite("matches.png", image_show);
cv::waitKey(0);
cout << "done." << endl;
return 0;
}
2.1 ORB提取
- 由于要取图像 16x16 块,所以位于边缘处的点(比如 u < 8 的)对应的图像块可能会出界,此时
需要判断该点是否在边缘处,并跳过这些点。 - 由于矩的定义方式,在画图特征点之后,角度看起来总是指向图像中更亮的地方。
- std::atan 和 std::atan2 会返回弧度制的旋转角,但 OpenCV 中使用角度制,如使用 std::atan 类
函数,请转换一下。
思路:提取 FAST 关键点,但是仅提取关键点不具有旋转不变性,也就是说当图片旋转后后续无法正确匹配,所以需要利用灰度质心法增加旋转不变性。
0读入图片
1定义一个cv::KeyPoint类型的容器,名字叫keypoints;利用FAST类提取关键点,注意第一个参数是读入的图片,第二个参数是刚刚定义的容器的名字keypoints,用于存储所提取的关键点,此时不具有旋转不变性
2利用灰度质心算法求解角度,cv::KeyPoint类下有成员变量angle,所以计算得到的灰度质心角便被存入keypoints,在程序中即为kp.angle。
根据灰度质心法算法,编写的代码如下:
//compute the angle
void computeAngle(const cv::Mat &image, vector<cv::KeyPoint> &keypoints) {
int half_patch_size = 8;
int half_boundary = 16;
for (auto &kp : keypoints) {
// Check if keypoint is too close to the edges
if (kp.pt.x < half_boundary || kp.pt.y < half_boundary ||
kp.pt.x >= image.cols - half_boundary || kp.pt.y >= image.rows - half_boundary){
continue;
}
// Compute angle from a 16x16 patch
float m01 = 0, m10 = 0;
for (int dx = -half_patch_size; dx < half_patch_size; ++dx) {
for (int dy = -half_patch_size; dy < half_patch_size; ++dy) {
uchar pixel = image.at<uchar>(kp.pt.y + dy, kp.pt.x + dx);
m10 += dx * pixel;
m01 += dy * pixel;
}
}
kp.angle = atan(m01/m10) * 180.f / M_PI;
}
}
2.2 ORB描述
请你完成 compute-ORBDesc 函数,实现此处计算。注意,通常我们会固定 p, q 的取法(称为 ORB 的 pattern),否则每
次都重新随机选取,会使得描述不稳定。我们在全局变量 ORB_pattern 中定义了 p, q 的取法,格式为u p , v p , u q , v q 。请你根据给定的 pattern 完成 ORB 描述的计算。
提示:
- p, q 同样要做边界检查,否则会跑出图像外。如果跑出图像外,就设这个描述子为空。
- 调用 cos 和 sin 时同样请注意弧度和角度的转换。
int ORB_pattern[256 * 4] = {
8, -3, 9, 5 /*mean (0), correlation (0)*/,
4, 2, 7, -12 /*mean (1.12461e-05), correlation (0.0437584)*/,
-11, 9, -8, 2 /*mean (3.37382e-05), correlation (0.0617409)*/,
7, -12, 12, -13 /*mean (5.62303e-05), correlation (0.0636977)*/,
......
}
// compute the descriptor
void computeORBDesc(const cv::Mat &image, vector<cv::KeyPoint> &keypoints,
vector<DescType> &desc) {
for (auto &kp : keypoints) {
DescType d(256, false);
for (int i = 0; i < 256; i++) {
int u = int(kp.pt.x), v = int(kp.pt.y);
// Check if keypoint is too close to the edges
if (u < 16 || v < 16 || u >= image.cols - 16 || v >= image.rows - 16) {
d.clear();
break;
}
else {
float angle = kp.angle / 180.f * M_PI;
float cos_theta = cos(angle);
float sin_theta = sin(angle);
cv::Point2f p(ORB_pattern[i*4], ORB_pattern[i * 4 + 1]);
cv::Point2f q(ORB_pattern[i*4 + 2], ORB_pattern[i * 4 + 3]);
// rotate with theta around z
cv::Point2f pp = cv::Point2f(cos_theta * p.x - sin_theta * p.y, sin_theta * p.x + cos_theta * p.y) + kp.pt;;
cv::Point2f qq = cv::Point2f(cos_theta * q.x - sin_theta * q.y, sin_theta * q.x + cos_theta * q.y) + kp.pt;;
// Check if the rotated pair is out of bounds
if(pp.x<0 || pp.y<0 || pp.x>=image.cols || pp.y>=image.rows ||
qq.x<0 || qq.y<0 || qq.x>=image.cols || qq.y>=image.rows){
desc.clear();
break;
}
// Compare the pair
d[i] = image.at<uchar>(pp.y, pp.x) < image.at<uchar>(qq.y, qq.x);
}
}
desc.push_back(d);
}
int bad = 0;
for (auto &d : desc) {
if (d.empty())
bad++;
}
cout << "bad/total: " << bad << "/" << desc.size() << endl;
}
2.3 暴力匹配
void bfMatch(const vector<DescType> &desc1, const vector<DescType> &desc2,
vector<cv::DMatch> &matches) {
int d_max = 50;
// Find matches between desc1 and desc
for(int i = 0; i < desc1.size(); i++) {
if (desc1[i].empty()) {
continue;
}
// Find the closest match for desc1 from desc2
float min_dist = 256;
int min_desc_idx = -1;
for (int j = 0; j < desc2.size(); j++) {
if (desc2[j].empty()) {
continue;
}
// Compute hamming distance
int distance = 0;
for (int k = 0; k < 256; ++k) {
//distance += (desc1[i][k] != desc2[j][k]) ? 1: 0;
distance += (desc1[i][k]) ^ (desc2[j][k]);
}
// Update closest match
if (distance < min_dist) {
min_dist = distance;
min_desc_idx = j;
}
}
// Check if min distance <= threshold
if (min_dist < d_max) {
cv::DMatch match;
match.distance = min_dist;
match.queryIdx = i;
match.trainIdx = min_desc_idx;
matches.push_back(match);
}
}
}
2.4 多线程ORB
暂时先不做了,涉及到C++17新的标准还没有学习到那个地步。















 3271
3271











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









