







1.获得ROS_bag
如果手头有IMU可以自己录制bag文件,本篇介绍如何在ROS环境中使用 WHEELTEC N100 惯导模块。
(1)配置固定串口设备
1)修改串口号
从网上下载 CP21xxCustomizationUtility 软件,通过 CP21xxCustomizationUtility 这个 windows 上的软件修改并固定。程序链接:https://download.csdn.net/download/ASUNAchan/86728154?spm=1001.2014.3001.5503
2)设备创建别名
外设对应的串口名一般都是会变化的,为了避免手动选择,这里可以通过给 USB 设备创建别名的方式解决。
1 命名一个wheeltec_udev.sh 脚本文件:
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60",ATTRS{serial}=="0003", MODE:="0777", GROUP:="dialout", SYMLINK+="fdilink_ahrs"' >/etc/udev/rules.d/fdilink_ahrs.rules
service udev reload
sleep 2
service udev restart
其中 ATTRS{serial}==“0003” 就是刚从0001改为的0003。
2 给这个脚本文件赋权:
sudo chmod 777 wheeltec_udev.sh
3 执行脚本:
sudo sh wheeltec_udev.sh
(2)配置ROS驱动功能包
驱动包地址:https://github.com/SHUNLU-1/fdilink_ahrs.git
1)创建ROS工作空间
mkdir -p 自定义空间名称/src
将下载好的驱动包文件放在src文件夹下
cd 自定义空间名称
catkin_make
如果没有安装串口驱动,则安装:
sudo apt install ros-noetic-serial
2)运行
1 启动ROS
roscore
2 运行
cd 工作空间
source ./devel/setup.bash
roslaunch fdilink_ahrs ahrs_driver.launch
3 查看话题
rostopic list
通过 rostopic echo /imu 打印imu消息
4 录制
录制imu话题 (一般为两个小时左右)
rosbag record /imu -o imu.bag
2.使用imu_utils标定
(1)安装imu_utils
网上资料很多,此处就不赘述了。基本上是创建工作空间,将包放在src文件夹下编译。
(2)标定
1)查看imu.bag包
rosbag info imu.bag
录制的数据
path: imu.bag
version: 2.0
duration: 2hr 3:40s (7420s)
start: Sep 29 2022 15:54:05.05 (1664438045.05)
end: Sep 29 2022 17:57:45.10 (1664445465.10)
size: 268.3 MB
messages: 742014
compression: none [347/347 chunks]
types: sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
topics: /imu 742014 msgs : sensor_msgs/Imu
2)launch文件
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/imu"/>
<param name="imu_name" type="string" value= "mems"/>
<param name="data_save_path" type="string" value= "$(find imu_utils)/data2/"/>
<param name="max_time_min" type="int" value= "120"/>
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>
3)生成Allan方差数据
cd 工作空间
source ./devel/setup.bash
roslaunch imu_utils mems.launch
打开一个窗口,倍速播放imu.bag数据
rosbag play -r 200 imu.bag
在data文件夹下生成一些数据,其中mems_imu_param.yaml文件:
%YAML:1.0
---
type: IMU
name: mems
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 8.4255797310257684e-03
gyr_w: 8.0220535819774673e-05
x-axis:
gyr_n: 3.3386166058607726e-03
gyr_w: 4.9852324036276215e-05
y-axis:
gyr_n: 6.0109360367037205e-03
gyr_w: 4.2140284844438258e-05
z-axis:
gyr_n: 1.5927186550512812e-02
gyr_w: 1.4866899857860955e-04
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 2.5570191303919226e-02
acc_w: 2.4360505792146779e-03
x-axis:
acc_n: 5.3263758480915149e-02
acc_w: 5.3969183475373857e-03
y-axis:
acc_n: 1.1062720096106503e-02
acc_w: 7.2464052789635480e-04
z-axis:
acc_n: 1.2384095334736032e-02
acc_w: 1.1865928622102927e-03
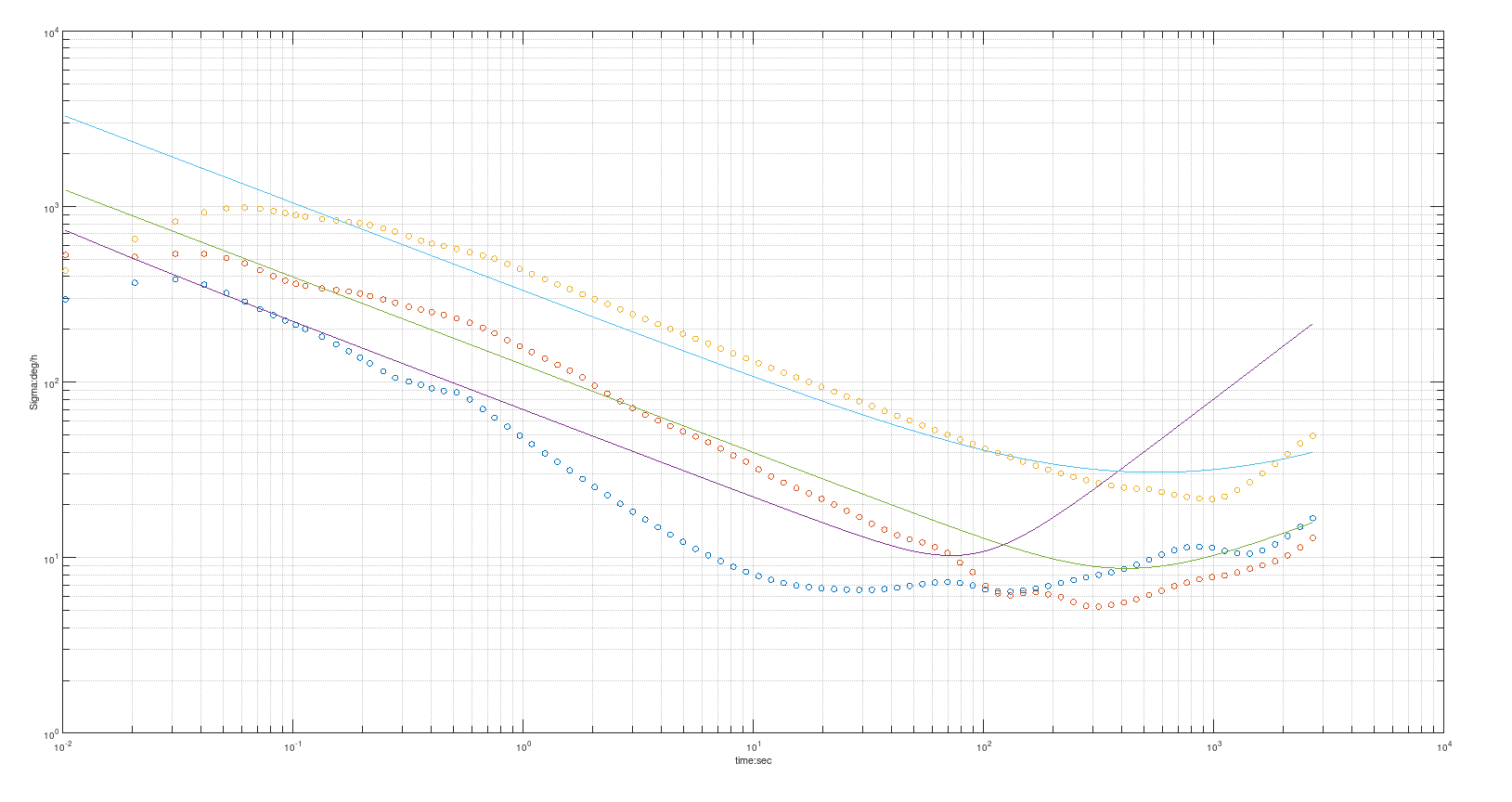
4)绘制Allan方差图
修改 /scripts/draw_allan.m中的文件路径
clear
close all
dt = dlmread('../data2/data_mems_gyr_t.txt');
data_x = dlmread('../data2/data_mems_gyr_x.txt');
data_y= dlmread('../data2/data_mems_gyr_y.txt');
data_z = dlmread('../data2/data_mems_gyr_z.txt');
data_draw=[data_x data_y data_z] ;
data_sim_x= dlmread('../data2/data_mems_sim_gyr_x.txt');
data_sim_y= dlmread('../data2/data_mems_sim_gyr_y.txt');
data_sim_z= dlmread('../data2/data_mems_sim_gyr_z.txt');
data_sim_draw=[data_sim_x data_sim_y data_sim_z] ;
figure
loglog(dt, data_draw , 'o');
% loglog(dt, data_sim_draw , '-');
xlabel('time:sec');
ylabel('Sigma:deg/h');
% legend('x','y','z');
grid on;
hold on;
loglog(dt, data_sim_draw , '-');
matlab不易安装无法使用的话可以选择开源软件Octave替代
运行draw_allan.m:
(3)结果分析
%YAML:1.0
---
type: IMU
name: mems
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 8.4255797310257684e-03
gyr_w: 8.0220535819774673e-05
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 2.5570191303919226e-02
acc_w: 2.4360505792146779e-03
通过查资料,WHEELTEC N100的采样频率应该为400Hz,$ \Delta t = \frac{1}{400} = 0.0025$
高斯白噪声:
σ
=
σ
d
Δ
t
\sigma = \sigma_d \sqrt{\Delta t}
σ=σdΔt
bias随机游走:
σ
b
=
σ
b
d
Δ
t
\sigma_b = \sigma_{bd} \sqrt{\Delta t}
σb=σbdΔt
| 高斯白噪声 | 标定结果 | 标定结果连续化 |
|---|---|---|
| 陀螺仪 | 8.4255797310257684e-03 | 0.00042127898655128844 |
| 加速度 | 2.5570191303919226e-02 | 0.0012785095651959614 |
| 陀螺仪随机游走 | 标定结果 | 标定结果连续化 |
|---|---|---|
| 陀螺仪 | 8.0220535819774673e-05 | 4.011026790988734e-06 |
| 加速度计 | 2.4360505792146779e-03 | 0.0001218025289607339 |
3.使用kalibr_allan标定
需要事先安装matlab。。。就不用它来标定了
后记:标定过程也是自己摸索的,而且生成的allan图感觉误差有点大的样子,欢迎指正错误。















 4426
4426











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









