








多个视觉摄像头,分别提取特征后如何聚合呢?

1. 基本思想
基本上就是投影映射得到高维特征空间表示

2.BEV要解决一件什么事(上帝视角光环)
跟驾驶相关的视觉任务基本都是多传感器融合,如何融合呢?
后融合(结果);前融合(数据);特征级融合
将多传感器特征汇总在3D空间上,在这上面做预测,分析,决策
而且BEV空间特征可以更容易拓展到下游任务

3.3D VS 4D
BEV空间的特征我们可以当作是3D的,但是能不能再拓展一步呢?
如果再考虑到时间维度,那就是一个4D特征空间了,包括是时序信息
时序特征更适合预测速度,轨迹,检测等任务而且还可以进行‘猜想’

4.特征融合过程中可能遇到的问题
1.自身运动补偿:车在运动,不同时刻之间的特征要对齐
2.时间差异:不同传感器可能具有时间差,要对齐这部分信息
3.空间差异:最后肯定都要映射到同一坐标系,空间位置特征也要对齐
4.谁去对齐呢?肯定不是手动完成的,这些都交给模型去学习就好了
5.BEV提出背景
1.相当于我们在上帝视角下重构了一个特征空间,空间的大小我们自己定义
2.特征空间相当于一个网格,网格的间隔也可以自己定义,对应精度也会有差异
3.在特征空间中,我们可以以全局的视角来进行预测,特征都给你了,咋用你来定
4.难点:既想做的细致,还想节约计算成本,怎么办?BevFormer它来了
6.BEV最终得到了什么
一个核心:纯视觉解决方案(多个视角摄像头进行特征融合)
两个策略:将Attention应用于时间与空间维度(其实就是对齐特征)
三个节约:Attention计算简化,特征映射简化,粗粒度特征空间
基本奠定了框架结构:时间+空间+DeformableAttention
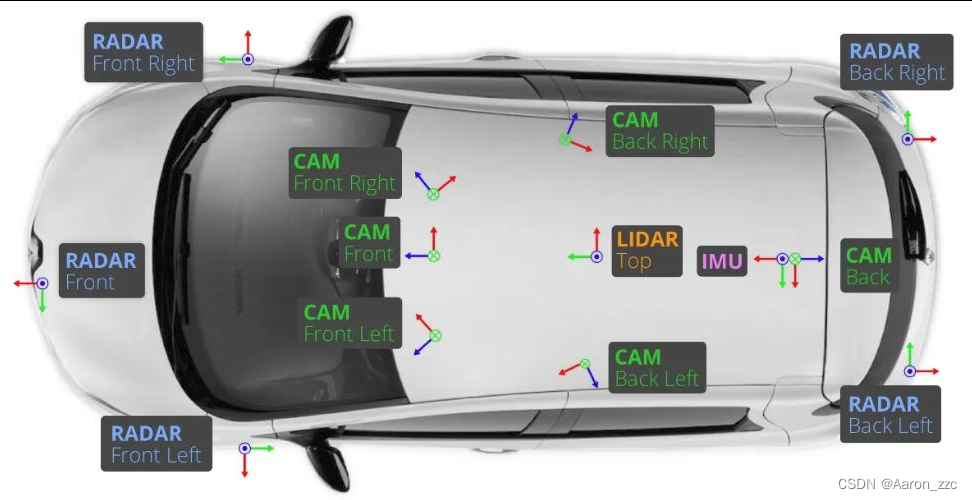
7.输入数据格式
输入张量(bs,queue,cam,C,H,W)
queue表示连续帧的个数,主要解决遮挡问题
cam表示每帧中包含的图像数量,nuScenes数据集中有6个
C,H,W分别表示图片的通道数,图片的高度,图片的宽度
我们只用这6个视觉的CAM数据.
8.Backbone
这步分别提特征就好了
基本上啥Backbone都可以,但是最好速度快一些
分别得到6个视角下的特征图,给后续空间注意力用
BEV特征空间中个每一个点都要在这些特征中采样

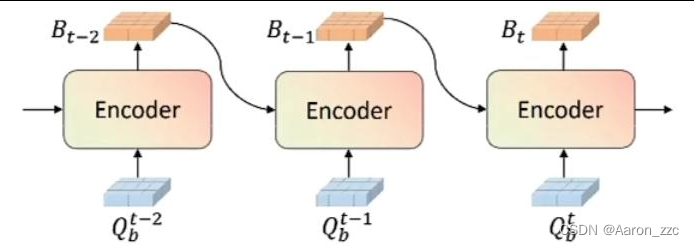
9.时间注意力模块
类似RNN的方式来利用前面一些时刻的特征
在时间上,不同帧中的车和周围物体都会有偏移,如何从历史中选需要的呢?
其实依旧是DeformableAttention,这东西现在已经是流行了

10.空间注意力模块
1.要融合多个视角的特征相当于query会遍历所有视角找有用的信息
2.3D空间的点要投影到2D空间,但是由于遮挡或者相机内外参不准
3.那么投影点就是一个参考而已,在这个基础上附近再进行特征采样
4.其实依旧是DeformableAttention的思想
(Local > point >global)
 5.如果特征空间是200*200那么就有4W的query
5.如果特征空间是200*200那么就有4W的query
6.4W个query和6个视角特征算Attention,这个有点慢了
7.通过映射已经能得到投影关系,针对每一个视角只选择其中一部分query
这样就相当于能把4W个的计算量大约降低成类似6000个(原作者说的)

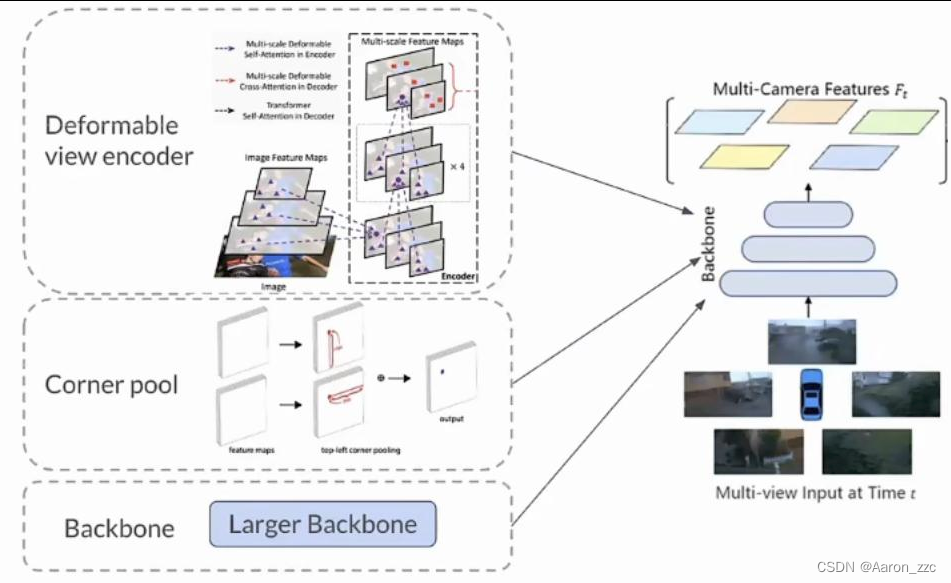
11.后续拓展升级
1.多尺度特征图
2.Corner Pool(针对检测)
3.突出角点特征
4.Backbone更强
 5.偏移量的预测可以用更大的卷积核1->3
5.偏移量的预测可以用更大的卷积核1->3
 6.多种检测器都可以用,然后做集成
6.多种检测器都可以用,然后做集成

11.2.时间与空间顺序
先时间再空间,因为前面时刻BEV有很多信息
相当于要充分利用先验知识,在此基础上再
继续融合当前帧的特征,从而构建当前BEV
重复多次(6次)得到最后的BEV空间特征
















 2085
2085











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









