






本文件规定了智能网联汽车V2X系统预警应用功能的通用要求、测试项目及测试方法,包括测试 场景的功能要求、测试步骤以及通过性条件。
本文件适用于具有V2X网联功能的M1类、N1类车辆的应用场景测试与评价,其他车辆类型可参考 执行。
1 术语和定义
| 术语 | 定义 |
|---|---|
| 被测车辆 | vehicle under test VUT |
| 背景车辆 | background vehicle BV 装载有OBU,具备周期广播V2X消息能力,与被测车辆配合完成测试任务的网联车辆。 |
| 重叠率 | overlap rate OR 被测车辆与背景车辆车身重叠部分占被测车辆的百分比。 重叠定义的参考线是被测车辆的中心线,在100%重叠的情况,被测车辆和背景车辆的中心线对 齐,如图1所示。 |
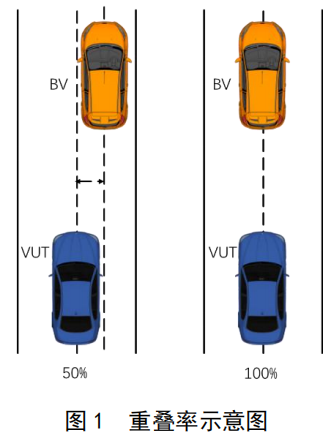 | |
| 车辆偏移率 | target offset rate TOR 车辆几何中心线相对于车道中心线的实际横向偏移量与最大横向偏移量的比率。其中,最大横 向偏移量为车辆左/右边线与本车道左/右车道线重叠时的位置,如图2所示。 |
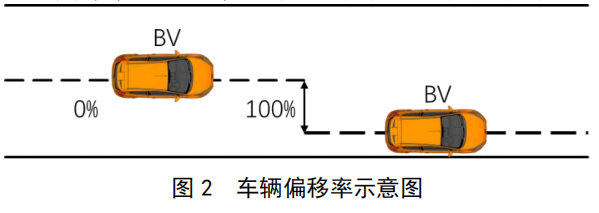 | |
| 碰撞时间 | time to collision TTC 在t时刻,自车与目标障碍物发生碰撞所需的时间。 |
| 纵向距离 | longitudinal distance 试验车辆前部位于第九十五百分位眼椭圆的中心与目标车辆最前端之间纵向的距离。 |
| 横向距离 | lateral distance 试验车辆车身最外缘(近目标车辆侧,不包括外后视镜)与目标车辆车身最外缘(近试验车辆 侧,不包括外后视镜)之间横向距离。 |
| 缩略语 | 全称 |
|---|---|
| AVW | 异常车辆提醒(Abnormal Vehicle Warning) |
| BTA | 自行车目标物(Bicyclist Target Adult) |
| CLW | 车辆失控预警(Control Lost Warning) |
| DNPW | 逆向超车预警(Do Not Pass Warning) |
| EBW | 紧急制动预警(Emergency Brake Warning) |
| ESP | 车身电子稳定系统(Electronic Stability Program) |
| EVW | 紧急车辆提醒(Emergency Vehicle Warning) |
| FCW: | 前向碰撞预警(Forward Collision Warning) |
| HLW | 道路危险状况预警(Hazardous Location Warning) |
| ICW | 交叉路口碰撞预警(Intersection Collision Warning) |
| IVS | 车内标牌(In-Vehicle Signage) |
| LDW | 车道偏离预警系统(Lane Departure Warning) |
| LTA | 左转辅助(Left Turn Assist) |
| PTA | 成年假人目标物(Pedestrian Target Adult) |
| PTC | 儿童假人目标物(Pedestrian Target Children) |
| RSM | 路侧单元消息(Road Side Message) |
| RLVW | 闯红灯预警(Red Light Violation Warning) |
| SLW | 限速预警(Speed Limit Warning) |
| SPAT | 信号灯消息(Signal Phase and Timing Message) |
| TCS | 牵引力控制系统(Traction Control System) |
| V2I | 车载单元与路侧单元通讯(Vehicle to Infrastructure) |
| V2P | 车载单元与行人设备通讯(Vehicle to Pedestrian) |
| V2V | 车载单元之间通讯(Vehicle to Vehicle) |
| VRU | 弱势交通参与者(Vulnerable Road User) |
| VRUCW | 弱势交通参与者碰撞预警(Vulnerable Road User Collision Warning) |
2 通用要求
2.1 测试环境基本要求
智能网联汽车测试场的基础测试道路、一般测试道路、道路网联环境以及配套服务设施等应
符合 T/CSAE 125 的要求。
如未标明特殊要求,所有测试均应在下述条件下进行:
——测试道路环境:空旷、无遮挡、无干扰;
——无降雪、冰雹、扬尘等恶劣天气情况;
——环境温度为-20℃~60℃;
——水平能见度应大于 500 m;
——测试道路限速大于等于 60 km/h 时,道路宽度不小于 3.5 m 且不大于 3.75 m;
——测试道路限速小于 60 km/h 时,道路宽度不小于 3.0 m 且不大于 3.5 m;
——测试道路长度宜大于 500 m,纵向坡度宜小于 0.5%,横向坡度宜小于 3%;
——测试环境应保证有 RSU 信号覆盖。
2.2 测试车辆基本要求
参与测试的被测车辆及背景车辆应符合下列基本要求:
——具备无线通信能力;
——空旷、无遮挡、无干扰条件下通信距离不小于 300 m;
——V2X 消息的发送应符合 YD/T 3340、YD/T 3707、YD/T 3709 与 T/CSAE 53—2020 的规定;
——具备对应场景分类的基本报警机制;
——符合 GB 7258 检测要求,对未符合检测要求的项目,应出具未降低车辆安全性能的相关证明材料;
——车辆应从车辆数据总线或其他数据源获取车辆速度、档位信息、车辆方向盘转角、车身周围的车灯状态、车辆事件标志、车辆四轴加速度、车辆制动系统状态等数据信息;
——背景车辆定位精度应小于 1.5 米。
2.3 测试过程精度要求
测试过程中,在被测车辆、背景车辆及测试目标替代物达到测试场景所规定的稳定运动状态时,应满足以下数据精度要求:
——VUT 及 BV 速度误差为±1.0 km/h;
——VUT 及 BV 侧向偏移量为±0.5 m;
——VUT 及 BV 横摆角速度误差为±1.0°/s;
——PTC 在距离车辆中心线小于 4 m(近端场景)时,速度为 5 km/h±0.2 km/h;
——PTA 距离车辆中心线小于 6 m (远端场景)时,速度为 6.5 km/h±0.2 km/h;
——BTA 距离车辆中心线小于 17 m(近端场景)时,速度为 15 km/h±0.2 km/h。
2.4 被测设备要求
被测车辆与背景车辆及路侧单元通信时的应用层端到端传输时延应小于 100 ms。
被测车辆的 V2X 预警系统应满足以下预警形式要求:
——预警应包含但不限于一种视觉预警或一种听觉或一种触觉预警;
——预备预警应包含视觉或听觉或两者组合的预警方式,可以选择触觉或其他形式作为补充;
——听觉预警提示音量应选择合理,清晰可辨;
——预警应具备分级能力,对于单个测试场景,预警分级数量需至少大于等于一级。
2.5 测试设备要求
2.5.1 路侧单元要求
路侧单元应满足以下要求:
——空旷、无遮挡、无干扰条件下通信距离不小于 300 m;
——发送的消息应符合 YD/T 3340、YD/T 3707、YD/T 3709 与 T/CSAE 159 的规定;
——根据测试场景的需求,路侧单元应支持对 V2X 消息内容的预配置(如配置逻辑路网(MAP)
消息中的车道限速值,路侧安全消息(RSI)中的道路危险状况类型及影响范围等)。
2.5.2 逻辑路网消息要求
路网消息应满足以下要求:
——路侧单元应周期广播测试道路的逻辑路网信息,且应至少覆盖参与测试的路段;
——逻辑路网信息应为车道级,且路网消息中的定位点精度应至少达到厘米级。
2.5.3 测试目标替代物要求
测试过程中可采用相关的测试目标替代物来代替真实的行人、非机动车等目标,行人目标物应符合ISO 19206-2的要求,非机动车目标物应符合ISO 19206-4的要求。
2.5.4 测试设备数据采集精度要求
测试过程中,测试设备应实时采集被测车辆、背景车辆、路侧单元及测试目标替代物的相关数据,对测试过程进行监控、收集与评价。测试过程中数据记录应包含以下内容:
——被测车辆及背景车辆运动状态参数(速度、航向角、四轴加速度等);
——被测车辆及背景车辆位置信息;
——被测车辆及背景车辆灯光和相关提示信息状态;
——被测车辆 V2X 应用预警信息(音、视频,图像信息或其他预警信号);
——反映被测及背景车辆行驶状态的视频信息;
——测试目标替代物的位置及运动数据。
测试设备的采集参数和精度要求见表 1。


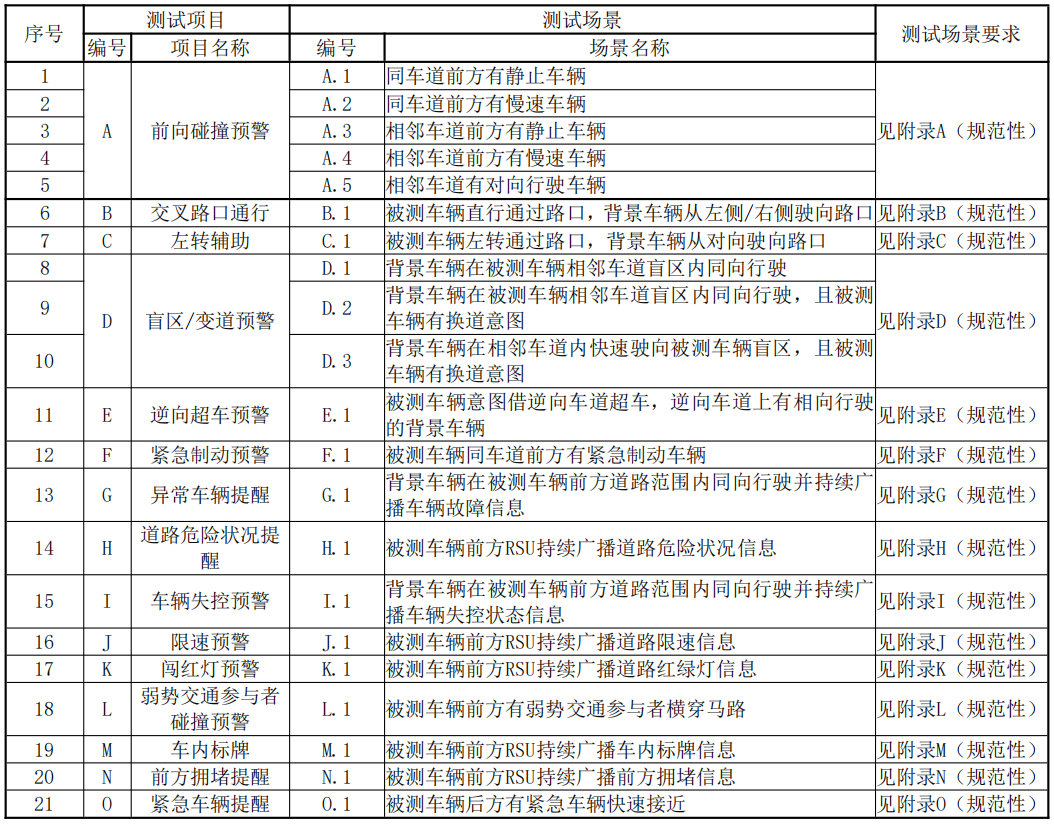
3 测试项目
本文件包含 15 项测试项目、21 种测试场景,详见表 2。
各测试场景的场景描述和功能要求、测试步骤、通过性条件见表 2 的测试场景要求。
4 测试方法
4.1 测试步骤
测试开始前,测试系统需采集当前测试用例下被测车辆的预期预警信息,用于测试过程中对被测车辆是否正确预警进行评价。
测试过程中,如无特殊要求,被测车辆应沿当前车道的中心线行驶,测试系统应实时采集、检测测试数据,验证被测车辆 V2X 功能是否能够通过视觉、听觉或触觉等方式正确预警,且预警结果是否符合相应的测试用例要求。测试过程分为状态调整阶段与性能评估阶段:
——状态调整阶段为被测车辆及背景车辆启动至达到测试用例的目标运动状态的过程;
——性能评估阶段为被测车辆及背景车辆达到测试用例的目标运动状态直至满足测试结束条件的过程。
4.2 测试结束条件
被测车辆在测试过程中发生以下情况认为本次试验结束:
——被测车辆 V2X 应用在性能评估阶段对测试用例进行合理响应;
——被测车辆 V2X 应用在性能评估阶段对测试用例进行错误响应(如预警类型错误、预警时机不正确等);
——被测车辆 V2X 应用在性能评估阶段对测试用例未响应。
4.3 通过性条件
各测试场景通过性条件应分别符合对应附录的要求。
对于单个测试场景下的测试用例,每个测试用例应进行 10 次重复实验且通过 7 次及以上,则认为被测车辆通过此测试用例。
附录A 前向碰撞预警测试场景
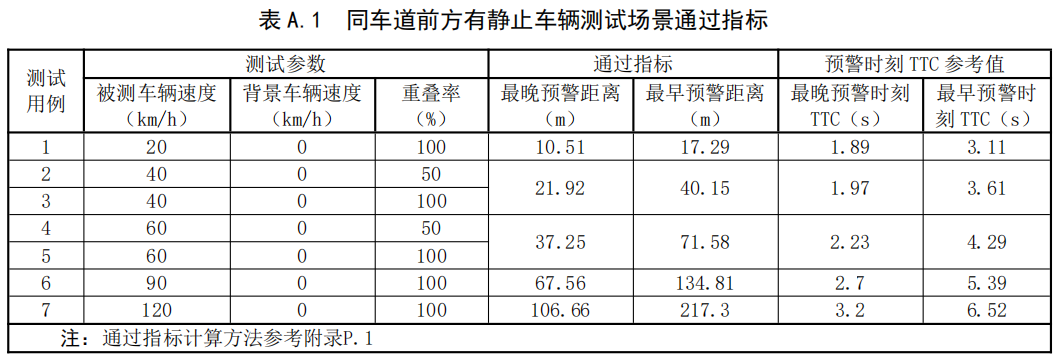
A.1 同车道前方有静止车辆
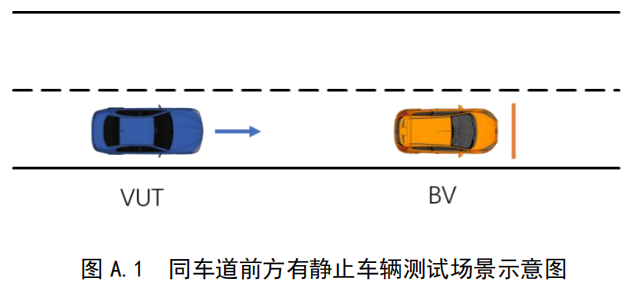
A.1.1 场景描述及功能要求
被测车辆沿道路方向行驶,同车道正前方有静止背景车辆,见图A.1,被测车辆和背景车辆有碰 撞危险,被测车辆发出FCW预警,预警时机应确保被测车辆驾驶员收到预警后,有足够时间采取措施, 避免与背景车辆发生追尾碰撞。
在该测试场景下,FCW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:15 km/h~最大设计速度;
——重叠率:50%~100%;
——背景车辆速度:0 km/h。
A.1.2 测试步骤
针对该测试场景,测试过程如图A.2所示,测试步骤如下:
a) 被测车辆和背景车辆同车道,被测车辆由静止状态加速至目标车速,并保持稳定行驶,此 时应满足被测车辆与背景车辆沿车道纵向距离大于 250 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性 能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 FCW 应用触发预警或达到最晚报警时机仍未触发预警,则测试结束。

A.1.3 通过性条件
针对该测试场景,被测车辆需通过表A.1规定的所有测试用例。
被测车辆在性能评估阶段应正确发出FCW预警信号,且预警时机需满足表A.1规定的通过指标。
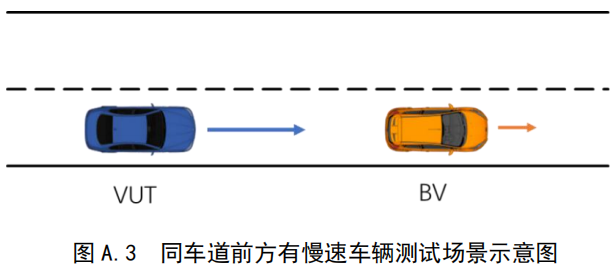
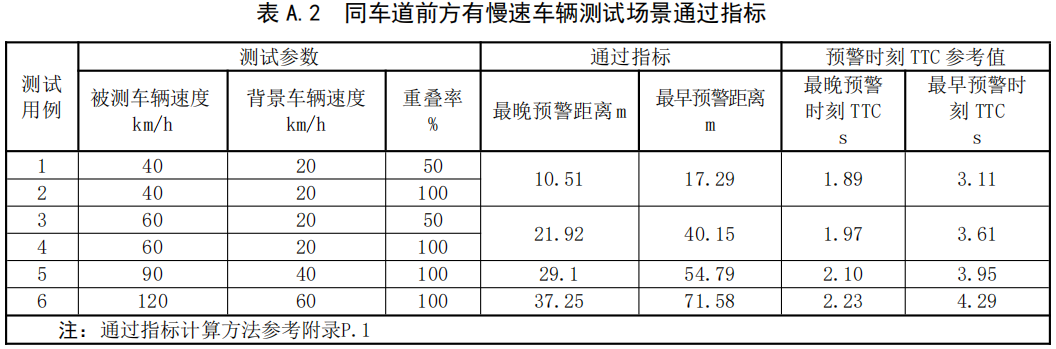
A.2 同车道前方有慢速车辆
A.2.1 场景描述及功能要求
被测车辆沿道路方向行驶,同车道正前方有低速行驶的背景车辆,见图A.3,被测车辆和背景车辆有碰撞危险,被测车辆发出FCW预警,预警时机需确保被测车辆驾驶员收到预警后,应有足够时间采取措施,避免与背景车辆发生追尾碰撞。
在该测试场景下,FCW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:15 km/h~最大设计速度;
——重叠率:50%~100%;
——背景车辆速度:0 km/h~60 km/h。
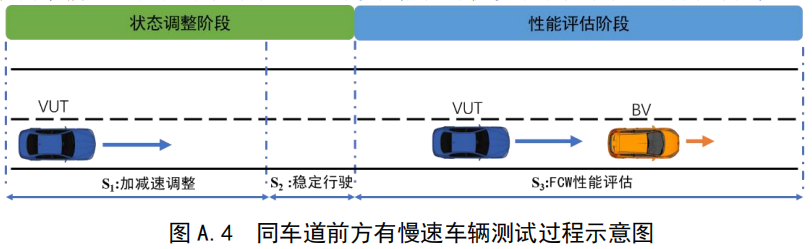
A.2.2 测试步骤
针对该测试场景,测试过程如图A.4所示,测试步骤如下:
a) 被测车辆和背景车辆同车道,被测车辆和背景车辆由静止加速至目标车速,并保持稳定行驶,此时应满足被测车辆与背景车辆沿车道纵向距离大于 200 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 FCW 应用触发预警或达到最晚报警时机仍未触发预警,则测试结束。
A.2.3 通过性条件
针对该测试场景,被测车辆应通过表A.2规定的所有测试用例。
被测车辆在性能评估阶段应正确发出FCW预警信号,且预警时机应满足表A.2规定的通过指标。
A.3 相邻车道前方有静止车辆
A.3.1 场景描述及功能要求
被测车辆沿道路方向行驶,相邻车道前方左/右相邻车道有静止的背景车辆,见图A.5。被测车辆匀速行驶直至超过相邻车道的静止背景车辆,被测车辆FCW应用不应发出预警信息。
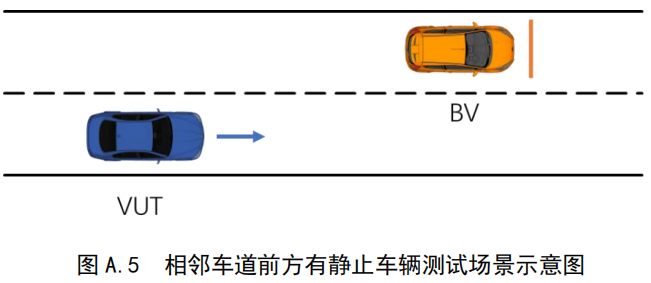
在该测试场景下,FCW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:15 km/h~最大设计速度;
——背景车辆偏移率:0%~50%;
——背景车辆速度:0 km/h。
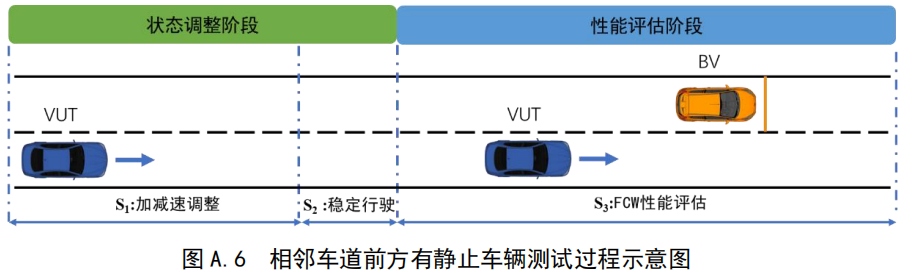
A.3.2 测试步骤
针对该测试场景,测试过程如图A.6所示,测试步骤如下:
a) 被测车辆在背景车辆左/右相邻车道,被测车辆由静止加速至目标车速,并保持稳定行驶, 此时应满足被测车辆与背景车辆沿车道纵向距离大于 200 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 FCW 应用触发预警或被测车辆超过背景车辆,则测试结束。
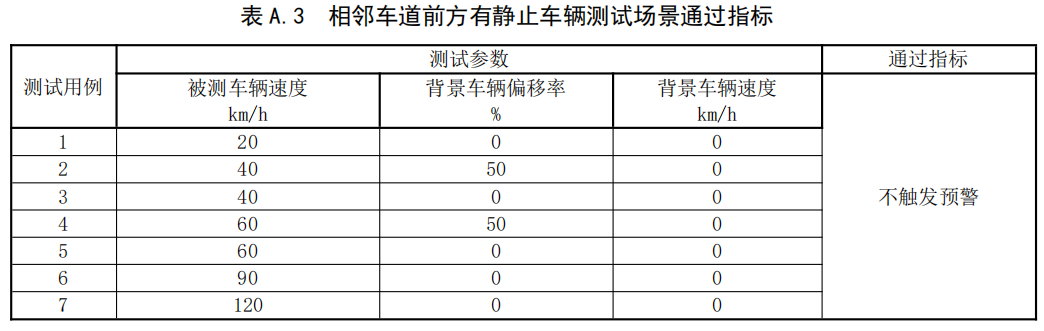
A.3.3 通过性条件
针对该测试场景,被测车辆应通过表A.3规定的所有测试用例。
被测车辆在性能评估阶段应不触发FCW预警。
A.4 相邻车道前方有慢速车辆
A.4.1 场景描述及功能要求
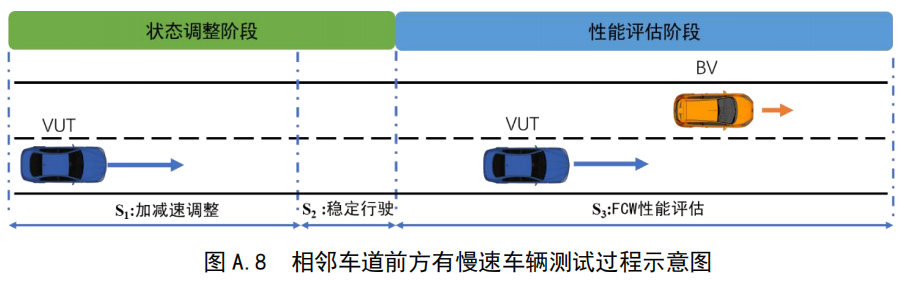
被测车辆沿道路方向行驶,相邻车道前方左/右相邻车道有低速行驶的背景车辆,见图A.7。被测车辆匀速行驶超过相邻车道的背景车辆,被测车辆 FCW应用不应发出预警信息。
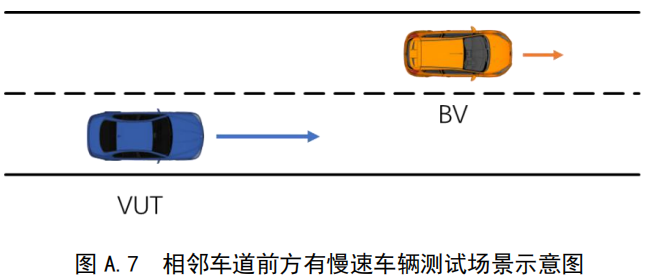
在该测试场景下,FCW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:15 km/h~最大设计速度;
——背景车辆偏移率:0%~50%;
——背景车辆速度:0 km/h~60 km/h。
A.4.2 测试步骤
针对该测试场景,测试过程如图A.8所示,测试步骤如下:
a) 被测车辆在背景车辆左/右相邻车道,被测车辆和背景车辆由静止加速至目标车速,并保持稳定行驶,此时应满足被测车辆与背景车辆沿车道纵向距离大于 200 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 FCW 应用触发预警或被测车辆超过背景车辆,则测试结束。
A.4.3 通过性条件
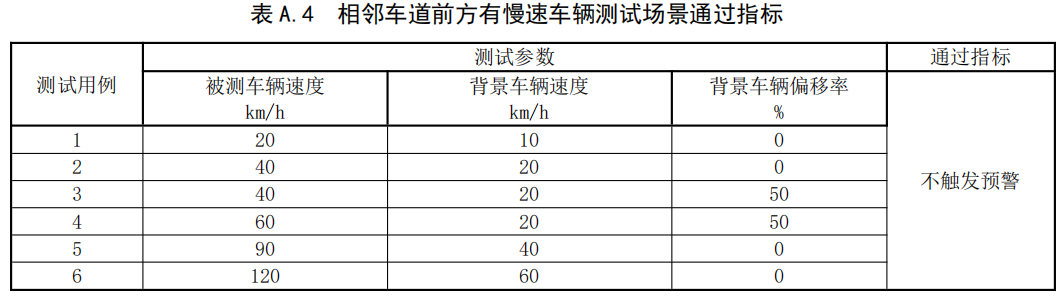
针对该测试场景,被测车辆应通过表A.4规定的所有测试用例。
被测车辆在性能评估阶段应不触发FCW预警。
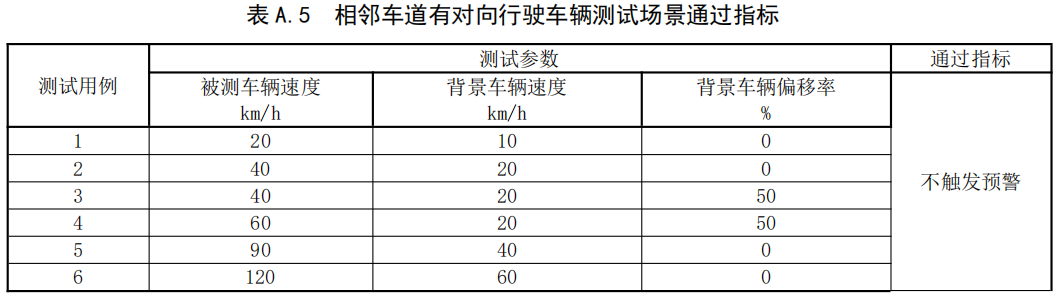
A.5 相邻车道有对向行驶车辆
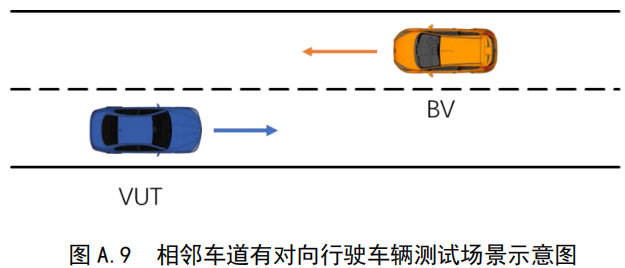
A.5.1 场景描述及功能要求
被测车辆沿道路方向行驶,相邻车道左前方相邻车道有对向行驶的背景车辆,见图A.9,被测车辆 FCW应用不应发出预警信息。
在该测试场景下,FCW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:15 km/h~最大设计速度;
——背景车辆偏移率:0%~50%;
——背景车辆速度:0 km/h~最大设计速度。
A.5.2 测试步骤
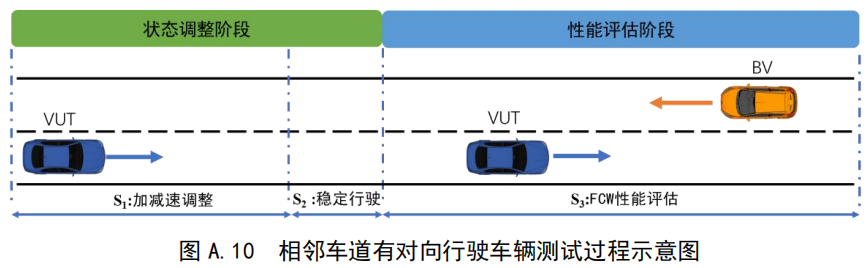
针对该测试场景,测试过程如图A.10所示,测试步骤如下:
a) 被测车辆在背景车辆的左侧相邻车道,被测车辆和背景车辆由静止加速至目标车速,并保持稳定行驶,此时应满足被测车辆与背景车辆沿车道纵向距离大于 200 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 FCW 应用触发预警或被测车辆与背景车辆完成会车,则测试结束。
A.5.3 通过性条件
针对该测试场景,被测车辆应通过表A.5规定的所有测试用例。
被测车辆在性能评估阶段应不触发FCW预警。
附录B 交叉路口通行测试场景
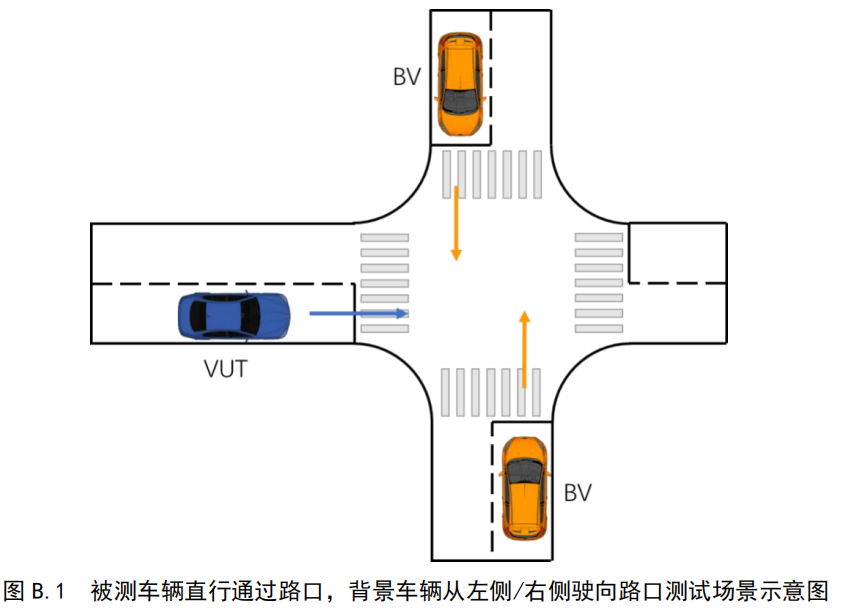
B.1 被测车辆直行通过路口,背景车辆从左侧/右侧驶向路口
B.1.1 场景描述及功能要求
被测车辆直行通过无信号灯交叉路口,背景车辆从左侧/右侧驶向路口,见图B.1,当被测车辆和背景车辆有碰撞危险时,被测车辆ICW应用应发出预警,预警时机应确保驾驶员收到预警后,有足够的时间采取措施,避免与背景车辆发生碰撞。
在该测试场景下,ICW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~60 km/h;
——背景车辆速度:10 km/h~60 km/h。
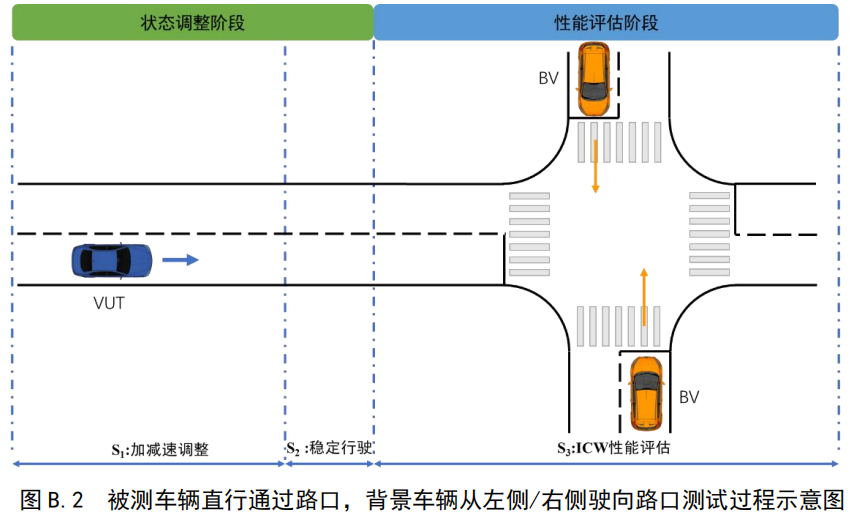
B.1.2 测试步骤
针对该测试场景,测试过程如图B.2所示,测试步骤如下:
a) 被测车辆与背景车辆沿车道中心线直行驶向交叉路口,被测车辆和背景车辆由静止加速至目标车速,并保持稳定行驶。此时应满足被测车辆与背景车辆到达碰撞点的 TTC 差值在 0.5 s 以内;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 ICW 应用触发预警或达到最晚报警时机仍未触发预警,则测试结束。
注:碰撞点为被测车辆轨迹与背景车辆轨迹交叉点,测试开始前可由测试人员进行标定,测试系统录入。
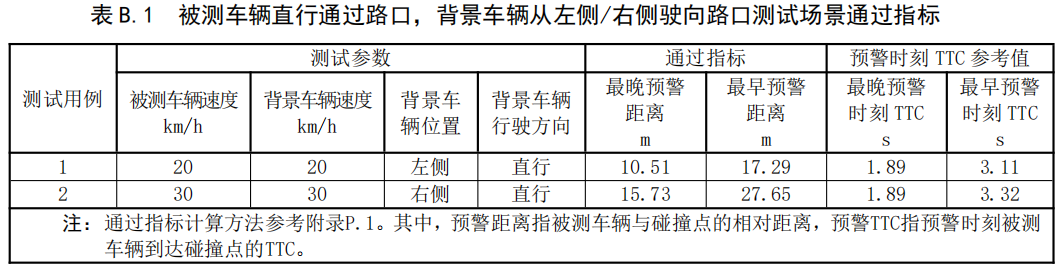
B.1.3 通过性条件
针对该测试场景,被测车辆应通过表B.1规定的所有测试用例。
被测车辆ICW应用应发出预警信号,且预警时机应满足表B.1规定的通过指标。
附录C 左转辅助测试场景
C.1 被测车辆左转通过路口,背景车辆从对向驶向路口
C.1.1 场景描述及功能要求
被测车辆左转通过路口,背景车辆从对向驶向路口,见图C.1,当被测车辆和背景车辆有碰撞危险时,被测车辆LTA应用应发出预警,预警时机应确保驾驶员收到预警后,有足够的时间采取措施,避免与背景车辆发生碰撞。
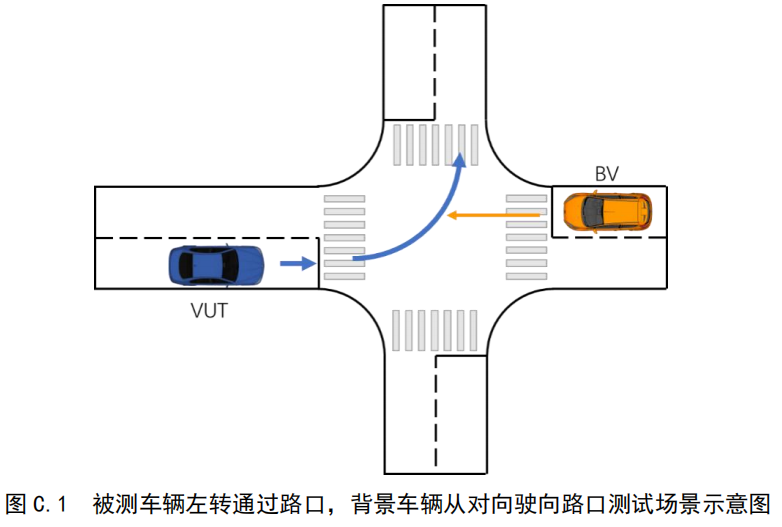
在该测试场景下,LTA应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~30 km/h;
——背景车辆速度:10 km/h~40 km/h。
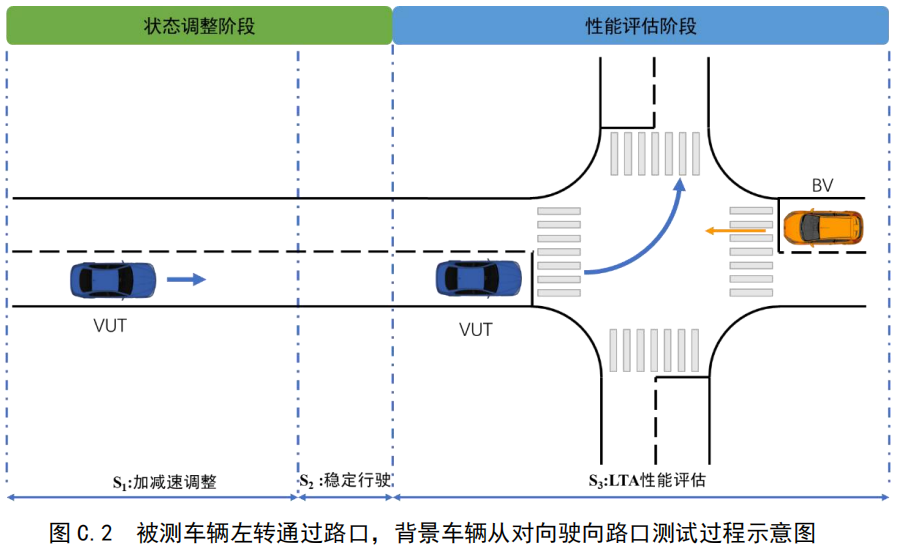
C.1.2 测试步骤
针对该测试场景,测试过程如图C.2所示,测试步骤如下:
a) 被测车辆沿当前车道中心线直行到达车道停止线(根据实际交叉路口宽度,被测车辆可先继续直行至能够以接近四分之一半圆的弧度转向目标车道的位置)后,左转弯匀速驶向目标道路最左侧车道,背景车辆沿当前车道中心线直行驶向交叉路口。被测车辆和背景车辆由静止加速至目标车速,并保持稳定行驶。此时应满足被测车辆与背景车辆到达碰撞点的TTC 差值在 0.5 s 以内;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 LTA 应用触发预警或达到最晚报警时机仍未触发预警,则测试结束。
注:碰撞点为被测车辆轨迹与背景车辆轨迹交点,测试开始前可由测试人员进行标定,测试系统录入。
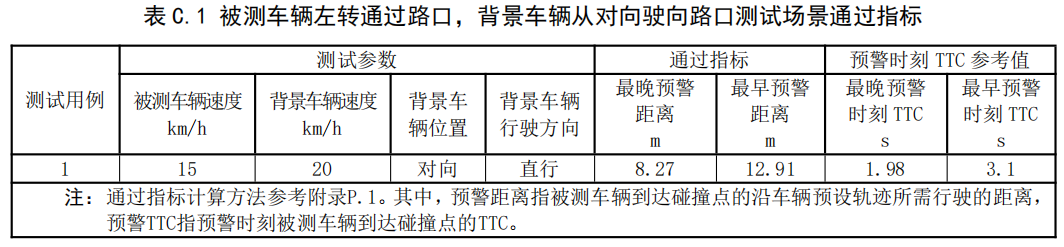
C.1.3 通过性条件
针对该测试场景,被测车辆应通过表C.1规定的所有测试用例。
被测车辆LTA应用应发出预警信号,且预警时机应满足表C.1规定的通过指标。
附录D 盲区/变道预警测试场景
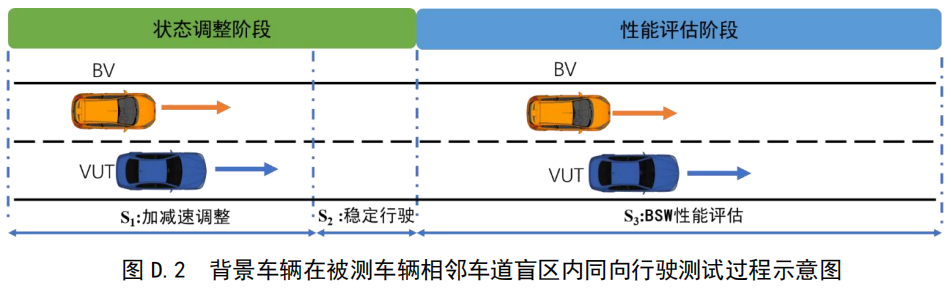
D.1 背景车辆在被测车辆相邻车道盲区内同向行驶
D.1.1 场景描述及功能要求
被测车辆在本车道内行驶,背景车辆在被测车辆左/右相邻车道盲区范围内同向行驶,见图D.1,被测车辆BSW应用发出预警。被测车辆盲区检测范围应满足GB/T 39265—2020要求。
在该测试场景下,BSW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~最大设计速度;
——背景车辆速度:10 km/h~最大设计速度。
D.1.2 测试步骤
针对该测试场景,测试过程如图D.2所示,测试步骤如下:
a) 被测车辆和背景车辆由静止加速至目标车速,背景车辆在被测车辆盲区监测范围内并维持稳定行驶;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆和背景车辆进入性能评估阶段后以稳定速度行驶超过 3s,期间被测车辆 BSW 应用持续触发预警或达到最晚报警时机仍未触发预警,则测试结束。
D.1.3 通过性条件
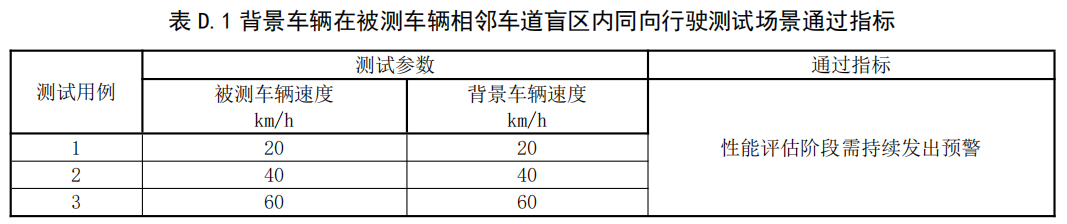
针对该测试场景,被测车辆应通过表D.1规定的所有测试用例。
被测车辆BSW应用应发出预警信号,且预警时机应满足表D.1规定的通过指标。
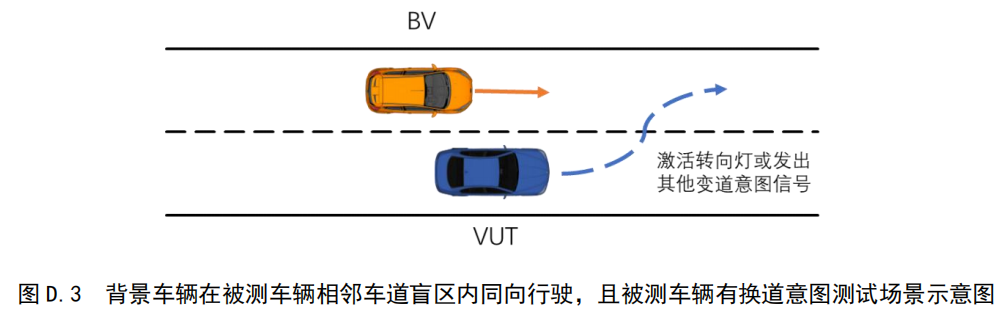
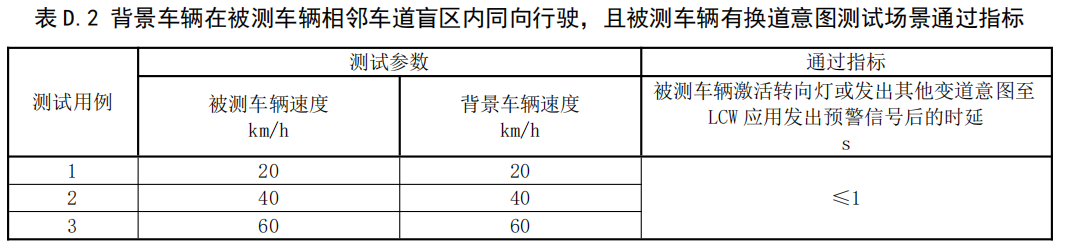
D.2 背景车辆在被测车辆相邻车道盲区内同向行驶,且被测车辆有换道意图
D.2.1 场景描述及功能要求
被测车辆在本车道内行驶,背景车辆在被测车辆左/右相邻车道盲区监测范围内同向行驶,被测车辆驾驶员向背景车辆发出变道意图(如打转向灯),见图D.3,被测车辆LCW应用应发出预警。被测车辆盲区检测范围应满足GB/T 39265—2020要求。
在该测试场景下,LCW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~最大设计速度;
——背景车辆速度:10 km/h~最大设计速度。
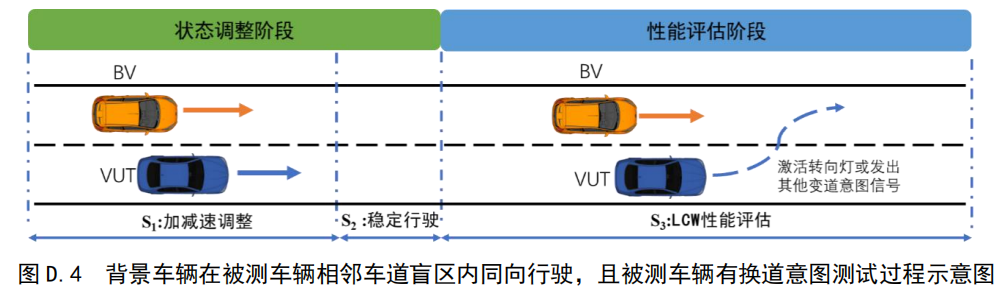
D.2.2 测试步骤
针对该测试场景,测试过程如图D.4所示,测试步骤如下:
a) 被测车辆和背景车辆由静止加速至目标车速,背景车辆在被测车辆盲区监测范围内并维持稳定行驶;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆在进入性能评估阶段后持续发出变道意图,被测车辆 LCW 应用触发预警或达到最晚报警时机仍未触发预警,则测试结束。
D.2.3 通过性条件
针对该测试场景,被测车辆应通过表D.2规定的所有测试用例。
被测车辆LCW应用应在驾驶员激活转向灯或者发出其他变道意图信号后发出预警信号,且预警时机应满足表E.2规定的通过指标。
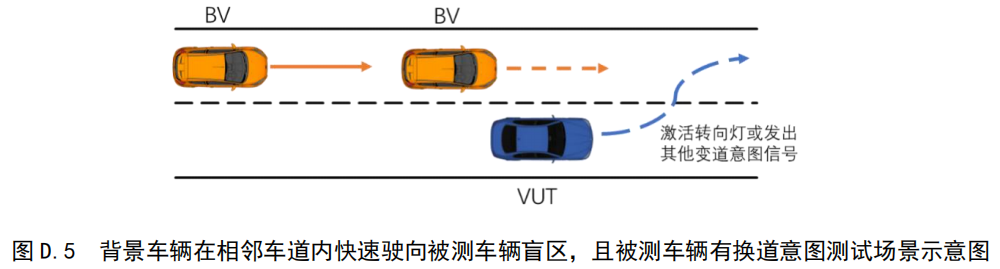
D.3 背景车辆在相邻车道内快速驶向被测车辆盲区,且被测车辆有换道意图
D.3.1 场景描述及功能要求
被测车辆在本车道内行驶,背景车辆在被测车辆左/右相邻车道快速驶向被测车辆盲区监测范围,被测车辆驾驶员向背景车辆所在变道意图(如打转向灯),见图D.5,被测车辆LCW应用发出预警。
被测车辆盲区检测范围应满足GB/T 39265—2020要求。
在该测试场景下,LTA应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~最大设计速度;
——背景车辆速度:10 km/h~最大设计速度。
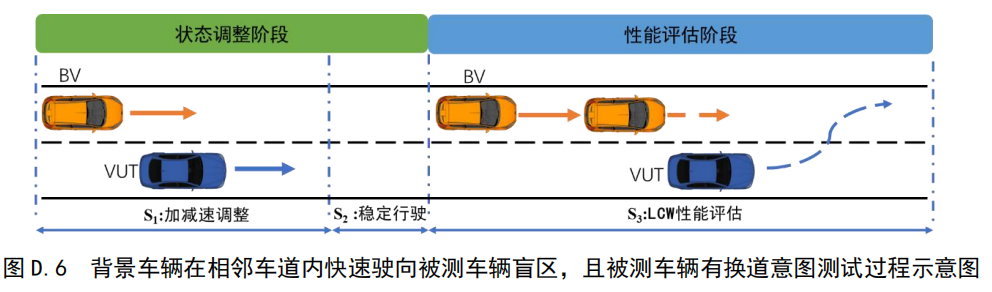
D.3.2 测试步骤
针对该测试场景,测试过程如图D.6所示,测试步骤如下:
a) 被测车辆和背景车辆由静止加速至目标车速,背景车辆匀速靠近被测车辆盲区监测范围,并维持稳定行驶,此时应满足被测车辆与背景车辆沿车道纵向距离大于 100 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆在进入性能评估阶段后持续发出变道意图,被测车辆 LCW 应用触发预警或达到最晚报警时机仍未触发预警,则测试结束。
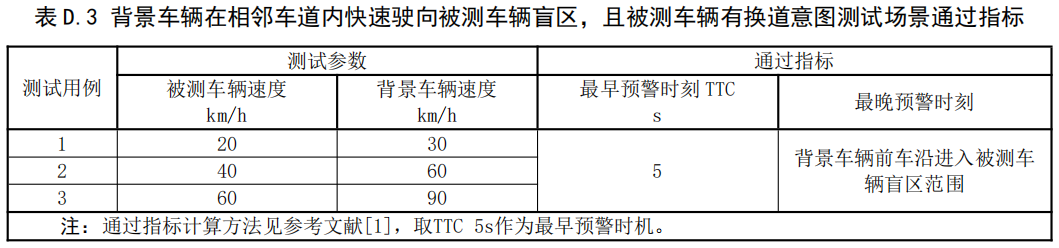
D.3.3 通过性条件
针对该测试场景,被测车辆应通过表D.3规定的所有测试用例。
被测车辆LCW应用应在驾驶员激活转向灯或者发出其他变道意图信号后发出预警信号,且预警时机应满足表D.3规定的通过指标。
附录E 逆向超车预警测试场景
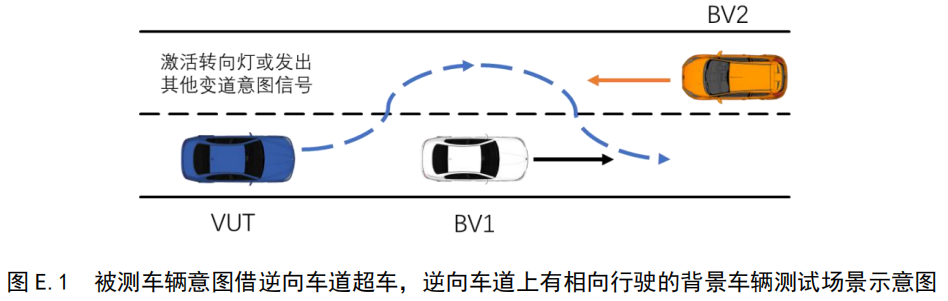
E.1 被测车辆意图借逆向车道超车,逆向车道上有相向行驶的背景车辆
E.1.1 场景描述及功能要求
被测车辆跟随同车道前方背景车辆BV-1同速同向行驶,被测车辆激活转向灯意图借逆向车道超车,背景车辆BV-2从被测车辆左侧相邻逆向车道对向行驶,见图E.1,当被测车辆无法完成超车时被测车辆DNPW应用发出预警,提醒驾驶员结束超车,避免发生碰撞。
在该测试场景下,DNPW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:20 km/h~70 km/h;
——背景车辆速度:20 km/h~70 km/h。
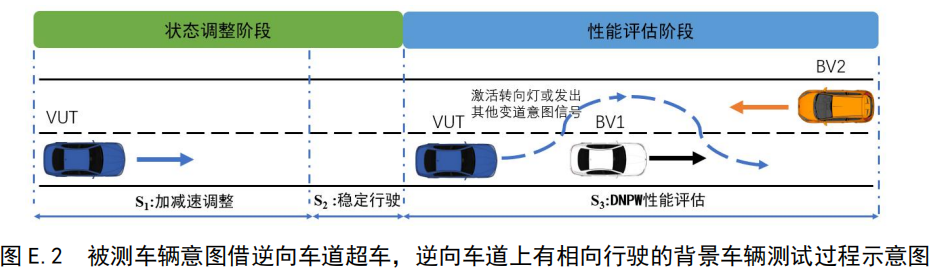
E.1.2 测试步骤
针对该测试场景,测试过程如图E.2所示,测试步骤如下:
a) 被测车辆与背景车辆 BV-1 由静止加速至目标车速,保持安全跟车距离并稳定行驶;
b) 背景车辆 BV-2 由静止加速至目标车速,保持稳定车速行驶,此时应满足被测车辆与背景车辆 BV-2 沿车道纵向距离大于 500 m;
c) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据,驾驶员应保持注意力高度集中,确保试验安全性;
d) 被测车辆驾驶员在进入性能评估阶段之前应激活转向灯或者发出其他借道超车意图信号(出于安全考虑,被测车辆与背景车辆 BV-1、BV-2 在性能评估阶段应保持当前运动状态,不发生实际超车行为),被测车辆 DNPW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
E.1.3 通过性条件
针对该测试场景,被测车辆应通过表E.1规定的所有测试用例。
被测车辆DNPW应用应发出预警信号,且预警时机应满足表E.1规定的通过指标。

附录F 紧急制动预警测试场景
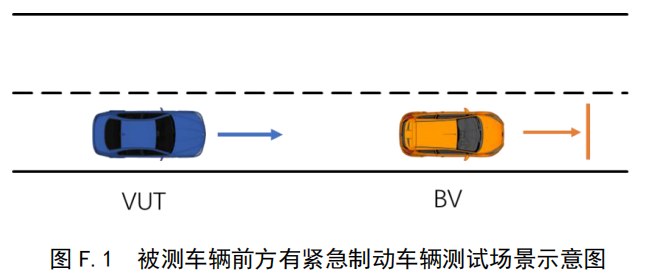
F.1 被测车辆同车道前方有紧急制动车辆
F.1.1 场景描述及功能要求
被测车辆和背景车辆在同车道内同向匀速行驶,被测车辆和背景车辆保持足够的安全跟车距离,背景车辆发生紧急制动,见图F.1,被测车辆EBW应用应及时发出预警,提醒被测车辆驾驶员前方有紧急制动车辆。
在该测试场景下,EBW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:15 km/h~最大设计速度;
——背景车辆速度:15 km/h~最大设计速度;
——重叠率:50%~100%。
注:前车紧急刹车场景作为车辆危险信息提示类(如异常车辆提醒、车辆失控提醒等场景)预警考虑(非直接
碰撞类),EBW预警应用的生效范围与被测车辆的当前车速有关,具体参考附录P.2。
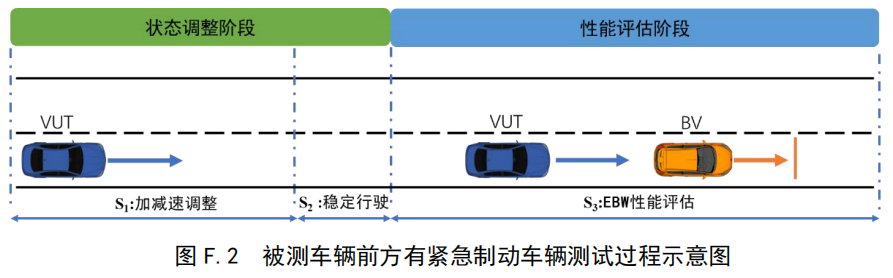
F.1.2 测试步骤
针对该测试场景,测试过程如图F.2所示,测试步骤如下:
a) 被测车辆和背景车辆由静止加速至目标车速,并保持稳定的跟车距离行驶,此时应满足实际跟车距离与测试用例设定跟车距离误差不大于 3 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据。被测车辆进入性能评估阶段时,背景车辆触发紧急制动并使减速度在 0.5 s 内迅速达到-4 m/s2~-5m/s2,驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 EBW 应用触发预警或背景车辆减速至停止,则测试结束。
F.1.3 通过性条件
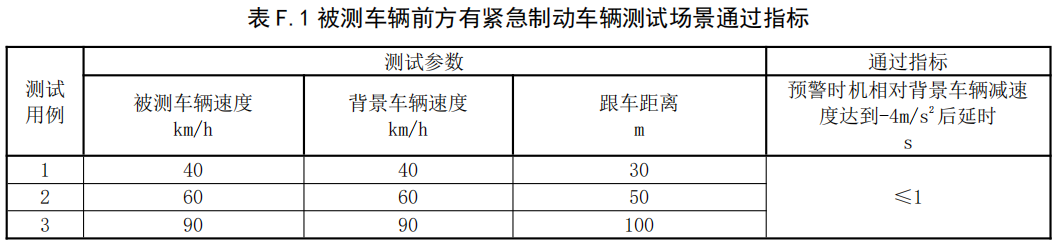
针对该测试场景,被测车辆应通过表F.1规定的所有测试用例。
背景车辆减速度达到-4 m/s2后被测车辆EBW应用应发出预警信号,且预警时机应满足表F.1规定的通过指标。
附录G 异常车辆提醒测试场景
G.1 背景车辆在被测车辆前方道路范围内同向行驶并持续广播车辆故障信息
G.1.1 场景描述及功能要求
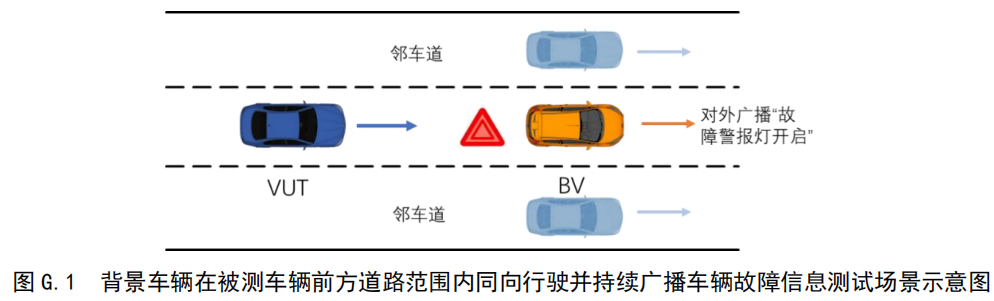
被测车辆匀速行驶,背景车辆在被测车辆的同车道、左/右相邻车道范围内静止或缓慢行驶并持续广播故障信息,见图G.1,当被测车辆和背景车辆纵向距离满足一定条件时,被测车辆AVW应用应发出预警,提醒驾驶员前方有异常车辆。
在该测试场景下,AVW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~最大设计速度;
——背景车辆速度:0 km/h~最大设计速度。
G.1.2 测试步骤
针对该测试场景,测试过程如图G.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速,背景车辆静止或由静止加速至目标车速,被测车辆和背景车辆保持稳定运动状态,此时应满足被测车辆与背景车辆沿车道纵向距离大于 200 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,背景车辆持续广播车辆故障信息,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 AVW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。

G.1.3 通过性条件
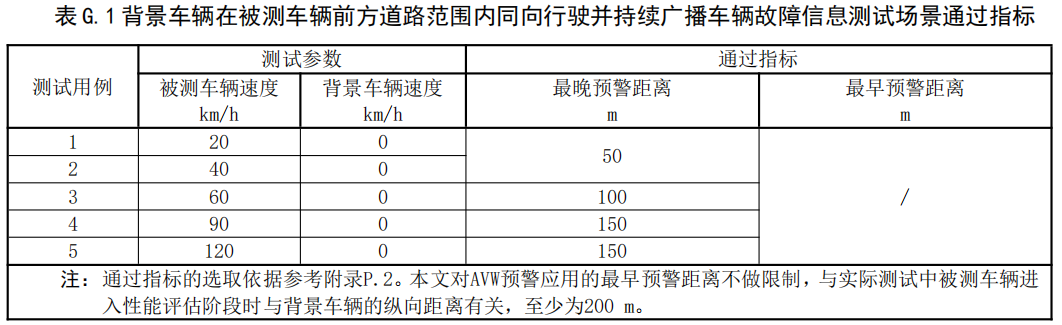
针对该测试场景,被测车辆应通过表G.1规定的所有测试用例。
被测车辆AVW应用应发出预警信号,且预警时机应满足表G.1规定的通过指标。
附录H 道路危险状况提醒测试场景
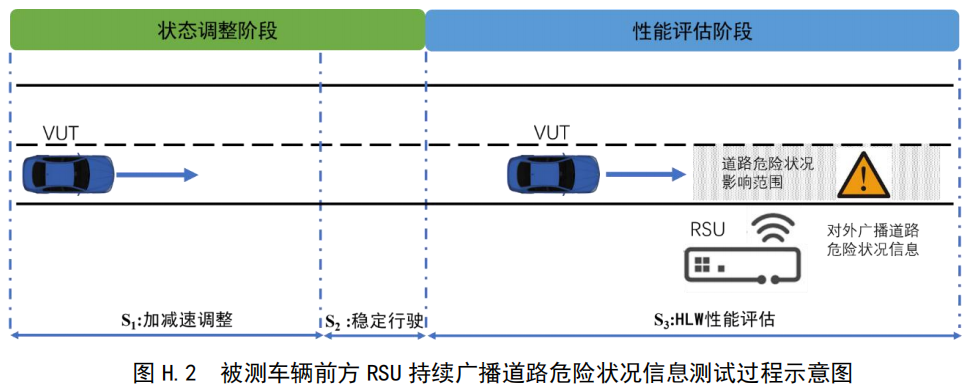
H.1 被测车辆前方 RSU 持续广播道路危险状况信息
H.1.1 场景描述及功能要求
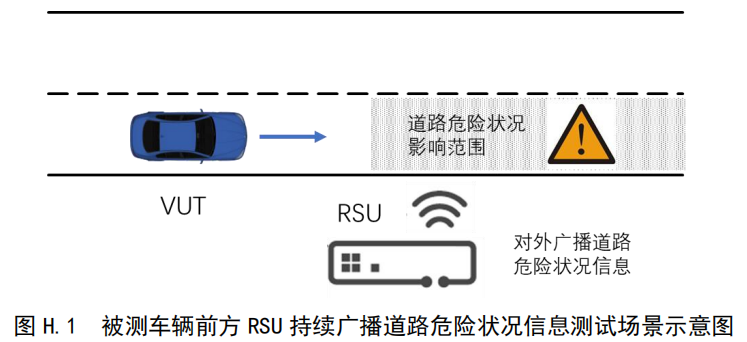
被测车辆匀速行驶,通信范围内有RSU持续广播道路危险状况信息,道路危险状况信息中心点位于被测车辆前方(RSU发送的RSI消息影响范围遵循T/CSAE 159要求),见图H.1。当被测车辆进入道路危险状况信息影响范围内时被测车辆HLW应用发出预警,提醒驾驶员前方有道路危险状况。
在该测试场景下,HLW应用应在被测车辆速度为10 km/h至最大设计速度范围下正常工作:
H.1.2 测试步骤
针对该测试场景,测试过程如图H.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速后保持稳定行驶,此时应满足被测车辆距离进入道路危险状况信息覆盖范围的沿车道纵向距离大于 50 m;
b) 测试系统应在被测车辆入性能评估阶段之前开始采集数据,RSU 持续广播道路危险状况信息,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 HLW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
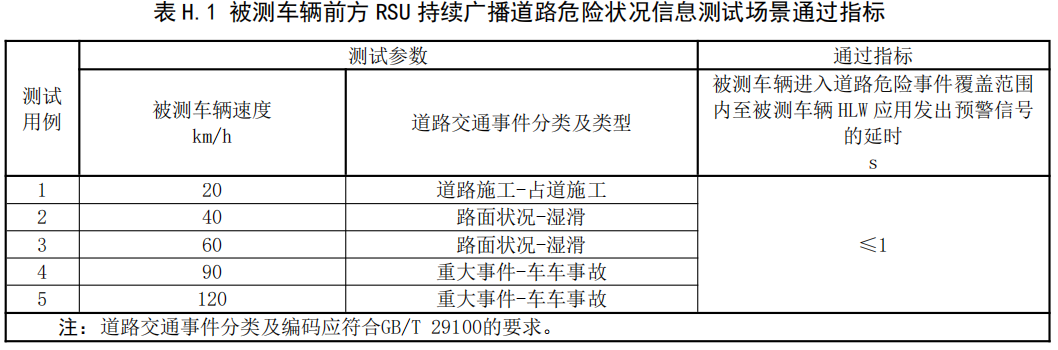
H.1.3 通过性条件
针对该测试场景,被测车辆应通过表H.1规定的所有测试用例。
被测车辆HLW应用应正确识别道路危险状况类型并发出预警信号,且预警时机应满足表H.1规定的通过指标。
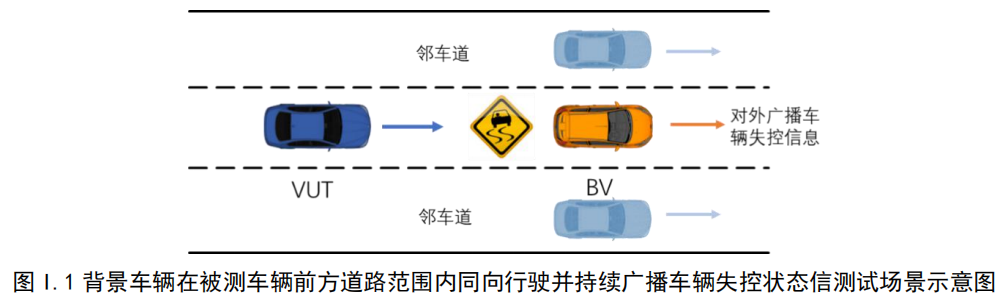
附录I 车辆失控预警测试场景
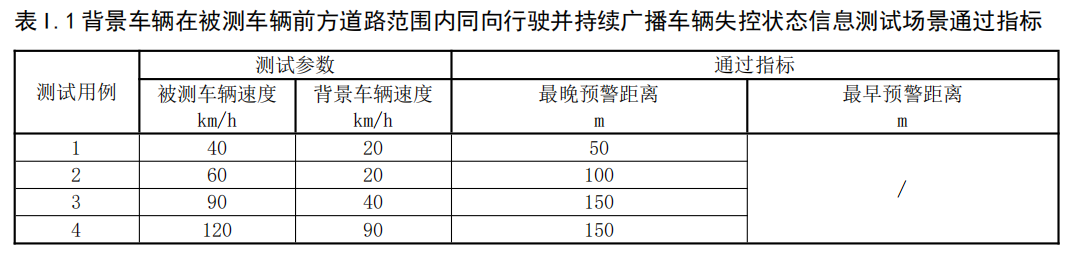
I.1 背景车辆在被测车辆前方道路范围内同向行驶并持续广播车辆失控状态信息
I.1.1 场景描述及功能描述
被测车辆与背景车辆同向匀速行驶,背景车辆在被测车辆的同车道、左/右相邻车道范围内持续广播车辆失控状态信息,见图I.1,当被测车辆和背景车辆纵向距离满足一定条件时,被测车辆CLW应用应发出预警,提醒驾驶员前方有失控车辆。
在该测试场景下,CLW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~最大设计速度;
——背景车辆速度:10 km/h~最大设计速度;
——车辆失控状态信息类型:制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制 系统(TCS)或车道偏移预警系统(LDW)等功能触发。
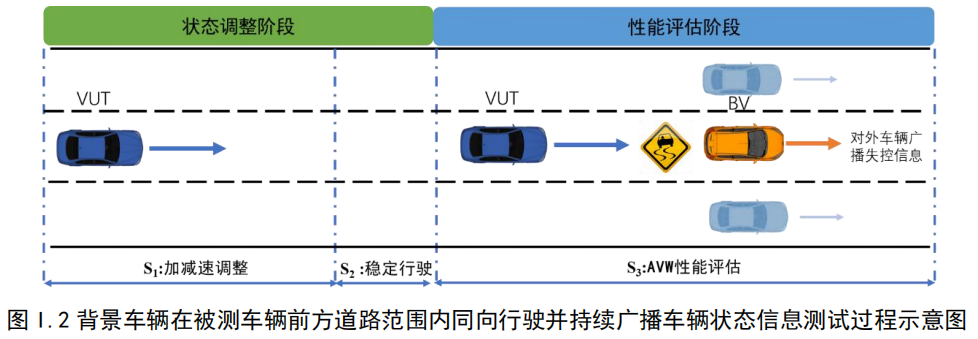
I.1.2 测试步骤
针对该测试场景,测试过程如图I.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速,背景车辆静止或由静止加速至目标车速,被测车辆和背景车辆保持稳定运动状态,此时应满足被测车辆与背景车辆沿车道纵向距离大于 200 m;
b) 测试系统应在被测车辆和背景车辆进入性能评估阶段之前开始采集数据,背景车辆持续广播车辆失控信息,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 CLW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
I.1.3 通过性条件
针对该测试场景,被测车辆应通过表I.1规定的所有测试用例。
被测车辆CLW应用应发出预警信号,且预警时机应满足表I.1规定的通过指标。通过指标的选取依据参考附录P.2。
附录J 限速预警测试场景
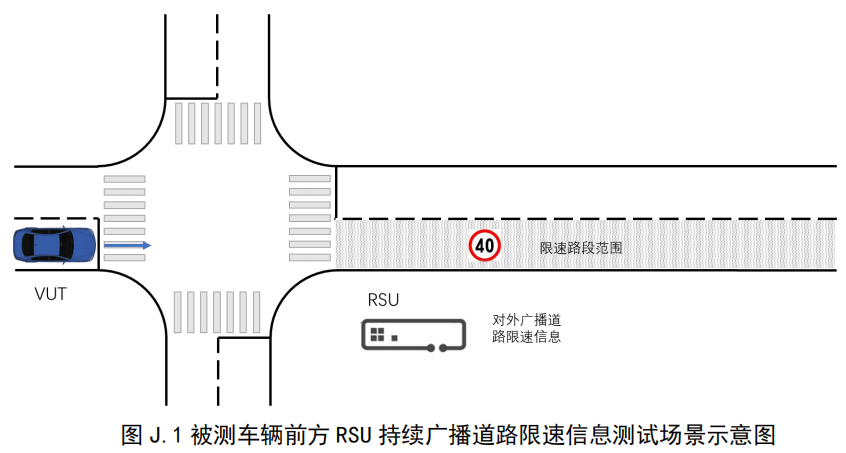
J.1 被测车辆前方 RSU 持续广播道路限速信息
J.1.1 场景描述及功能要求
被测车辆匀速行驶,通信范围内有RSU持续通过MAP消息广播前方道路的限速信息,见图J.1。当被测车辆进入限速路段且车速大于当前车道限速时,被测车辆SLW应用发出预警,提醒驾驶员减速。
在该测试场景下,SLW应用应在以下测试场景参数范围内正常工作:
被测车辆速度:10 km/h~最大设计速度。
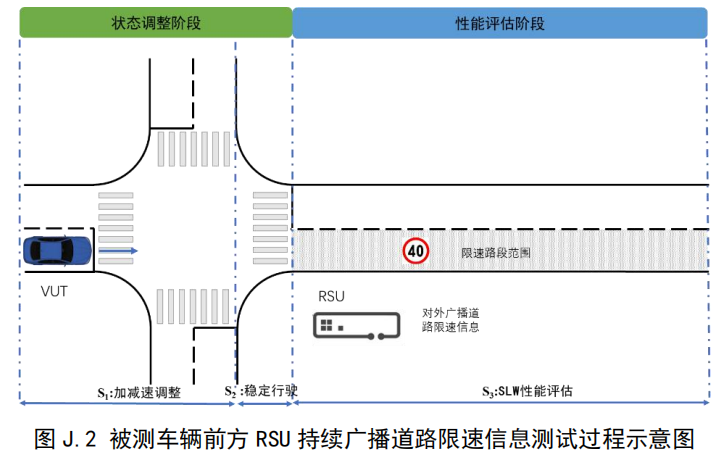
J.1.2 测试步骤
针对该测试场景,测试过程如图J.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速后保持稳定行驶,此时应满足被测车辆距离进入前方限速路端起始点纵向距离大于 50 m;
b) 测试系统应在被测车辆入性能评估阶段之前开始采集数据,RSU 持续广播道路限速信息,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 SLW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
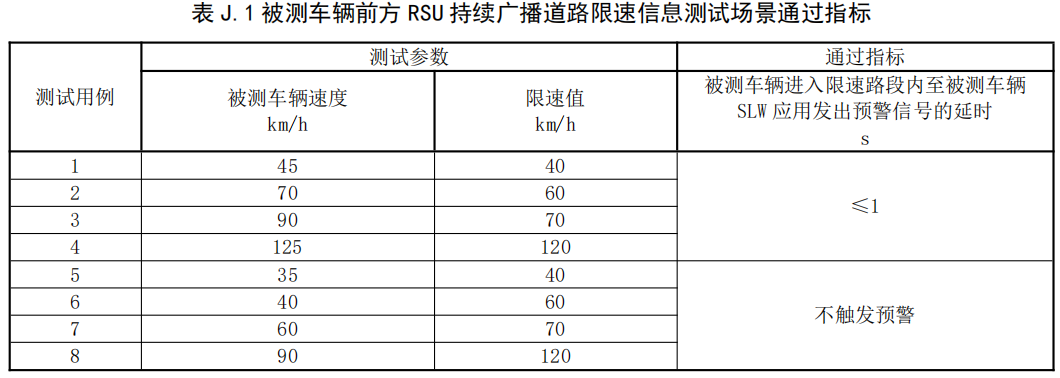
J.1.3 通过性条件
针对该测试场景,被测车辆应通过表J.1规定的所有测试用例。
被测车辆进入限速消息作用路段内SLW应用应能够正确识别当前道路的限速状态及数值,且当被测车辆当前车速超过限速值时,被测车辆SLW应用应及时发出预警信号,预警时机应满足表J.1规定的通过指标。
附录K 闯红灯预警测试场景
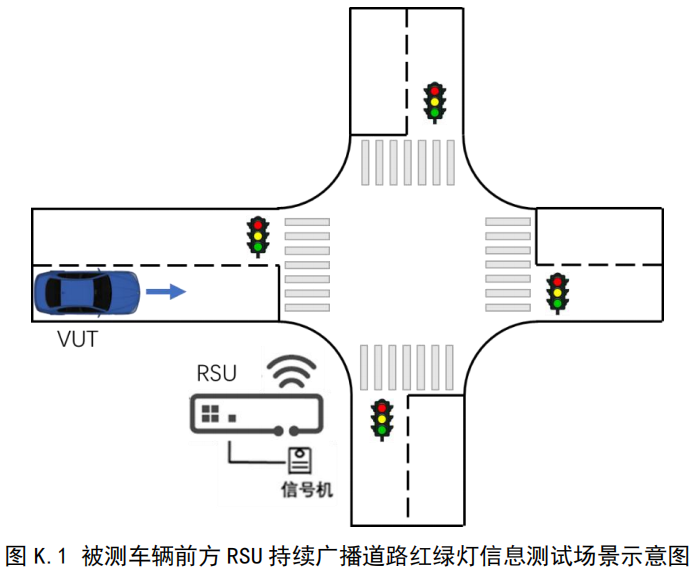
K.1 被测车辆前方 RSU 持续广播道路红绿灯信息
K.1.1 场景描述及功能要求
被测车辆匀速行驶,前方路口有红绿灯,通信范围内有RSU持续广播路口红绿灯信息(RSU通过
信号机获取信号灯相位状态广播SPAT消息),见图K.1,当被测车辆以当前车速无法通过路口时,被测车辆RLVW应用发出预警,提醒驾驶员前方红灯。
注:无法通过路口指车辆当前位置与停止线的纵向距离除以车速小于信号灯可通行的剩余时间(本文件中,黄灯状态与红灯等同)。
在该测试场景下,VRLVW应用应在以下测试场景参数范围内正常工作:
被测车辆速度:10 km/h~70 km/h。
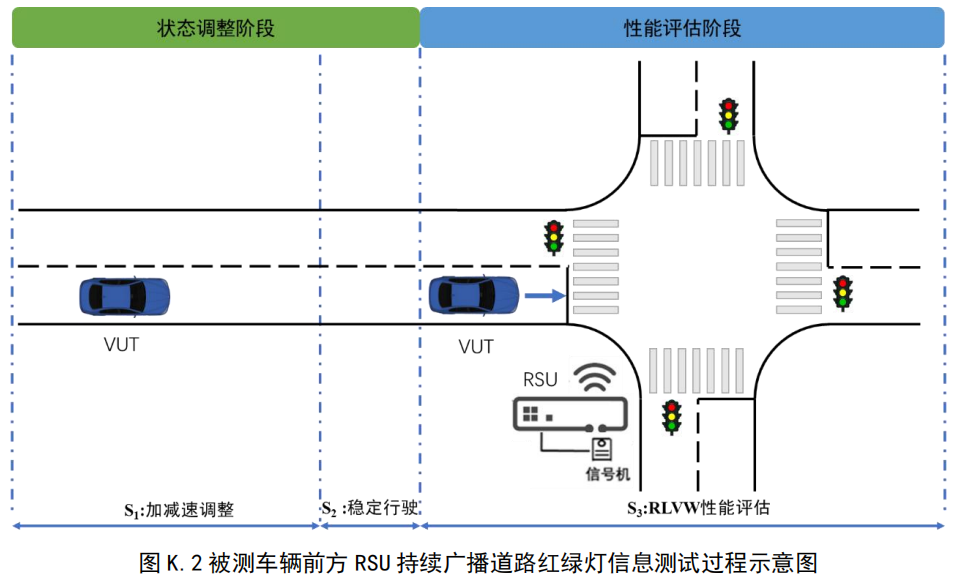
K.1.2 测试步骤
针对该测试场景,测试过程如图K.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速后保持稳定行驶,此时应满足被测车辆距离当前道路停止线纵向距离大于 100 m,当前车速无法通过路口;
b) 测试系统应在被测车辆入性能评估阶段之前开始采集数据,RSU 持续广播前方路口红绿灯信息,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 RLVW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
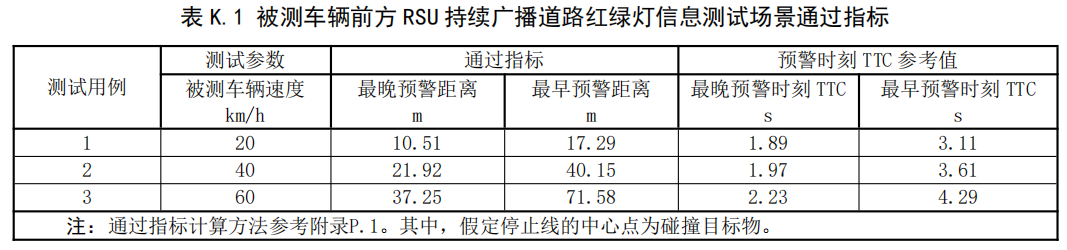
K.1.3 通过性条件
针对该测试场景,被测车辆应通过表K.1规定的所有测试用例。
被测车辆RLVW应用应发出预警信号,且预警时机应满足表K.1规定的通过指标。
附录L 弱势交通参与者碰撞预警测试场景
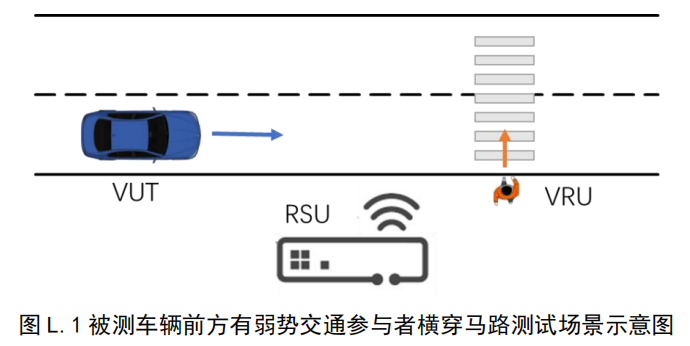
L.1 被测车辆前方有弱势交通参与者横穿马路
L.1.1 场景描述及功能要求
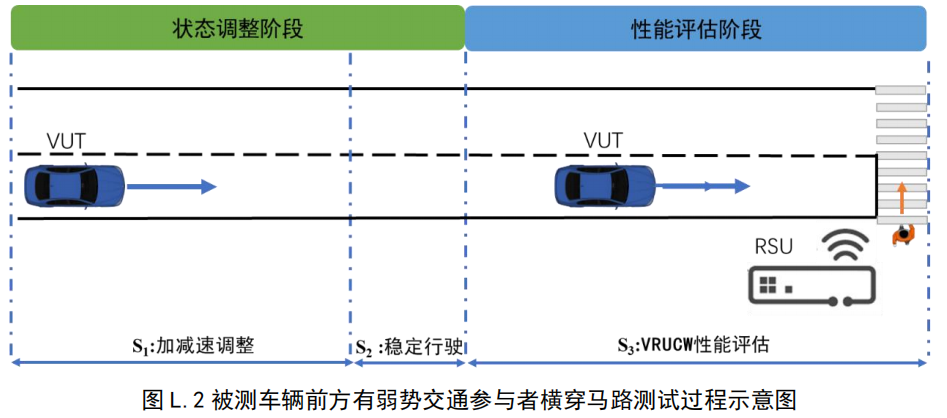
被测车辆沿直线道路匀速行驶,前方路口有VRU横穿马路,见图L.1,被测车辆和VRU有碰撞危险。
前方路口通信范围内设有具备感知能力的RSU,RSU感知到VRU后周期广播给被测车辆,被测车辆VRUCW应用发出预警,预警时机应确保被测车辆驾驶员收到预警后,有足够时间采取措施,避免与VRU发生碰撞。
在该测试场景下,VRUCW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:10 km/h~70 km/h;
——VRU 速度:5 km/h~15 km/h。
L.1.2 测试步骤
针对该测试场景,测试过程如图L.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速后保持稳定行驶,此时应满足被测车辆距离当前车道停止线中心点纵向距离大于 100 m;
b) 测试系统应在被测车辆入性能评估阶段之前开始采集数据,RSU 持续广播前方路口 VRU 信息,被测车辆进入性能评估阶段时,持续采集数据,VRU 由静止加速到目标速度且满足被测车辆与 VRU 到达碰撞点的 TTC 差值小于 0.5 s。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 VRUCW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
L.1.3 通过性条件
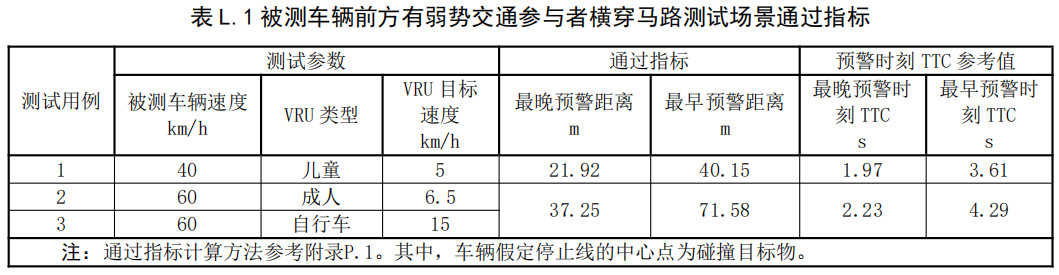
针对该测试场景,被测车辆应通过表L.1规定的所有测试用例。
被测车辆VRLVW应用应发出预警信号,且预警时机应满足表L.1规定的通过指标。
附录M 车内标牌测试场景
M.1 被测车辆前方 RSU 持续广播车内标牌信息
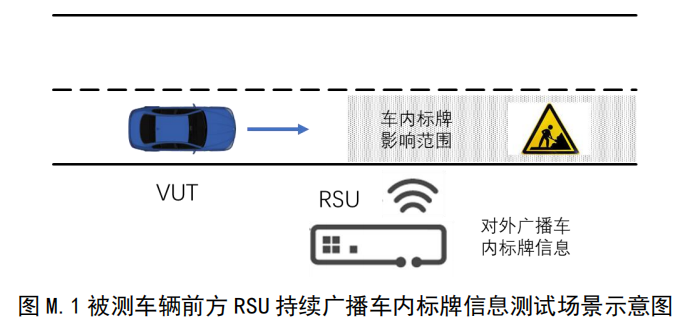
M.1.1 场景描述及功能要求
被测车辆匀速行驶,通信范围内有RSU持续广播车内标牌信息,车内标牌信息中心点位于被测车辆前方(RSU发送的RSI消息影响范围遵循T/CSAE 159要求),见图M.1。当被测车辆进入车内标牌信息影响范围内时被测车辆IVS应用发出预警,提醒驾驶员标牌信息。
在该测试场景下,IVS应用应在以下测试场景参数范围内正常工作:
被测车辆速度:10 km/h~最大设计速度。
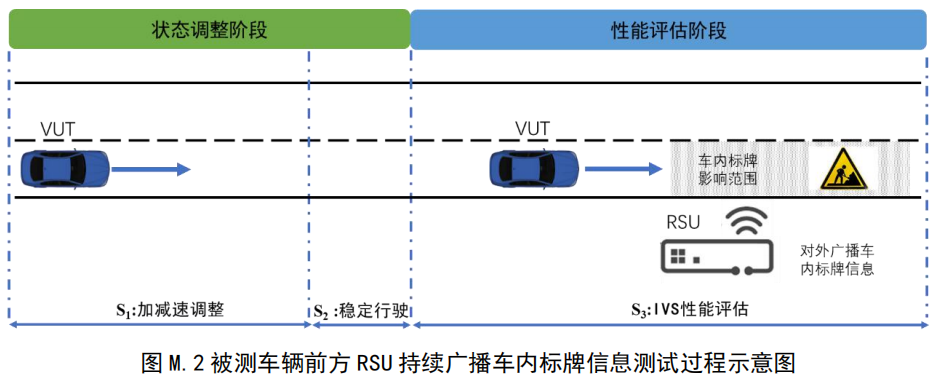
M.1.2 测试步骤
针对该测试场景,测试过程如图M.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速后保持稳定行驶,此时应满足被测车辆距离进入车内标牌信息覆盖范围的沿车道纵向距离大于 50 m;
b) 测试系统应在被测车辆入性能评估阶段之前开始采集数据,RSU 持续广播车内标牌信息,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 IVS 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
M.1.3 通过性条件
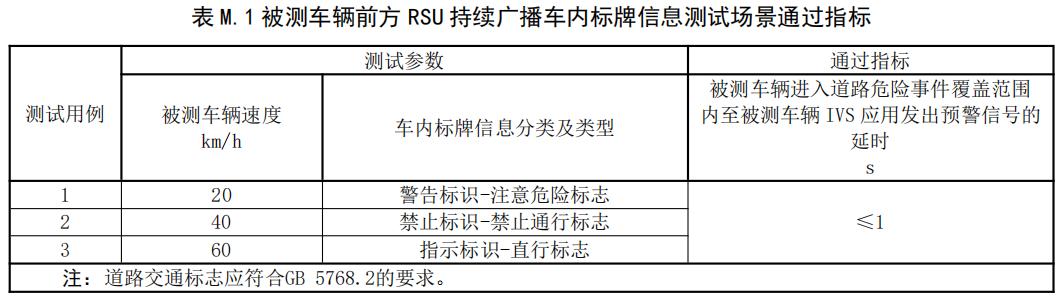
针对该测试场景,被测车辆应通过表M.1规定的所有测试用例。
被测车辆IVS应用应正确识别车内标牌类型并发出预警信号,且预警时机应满足表M.1规定的通过指标。
附录N 前方拥堵提醒测试场景
N.1 被测车辆前方 RSU 持续广播前方拥堵信息
N.1.1 场景描述及功能要求
被测车辆匀速行驶,通信范围内有RSU持续广播前方拥堵信息,前方拥堵信息中心点位于被测车辆前方(RSU发送的RSI消息影响范围遵循T/CSAE 159要求),见图N.1。当被测车辆进入前方拥堵信息影响范围内时被测车辆TJW应用发出预警,提醒驾驶员前方道路拥堵。

在该测试场景下,TJW应用应在以下测试场景参数范围内正常工作:
被测车辆速度:10 km/h~最大设计速度。
N.1.2 测试步骤
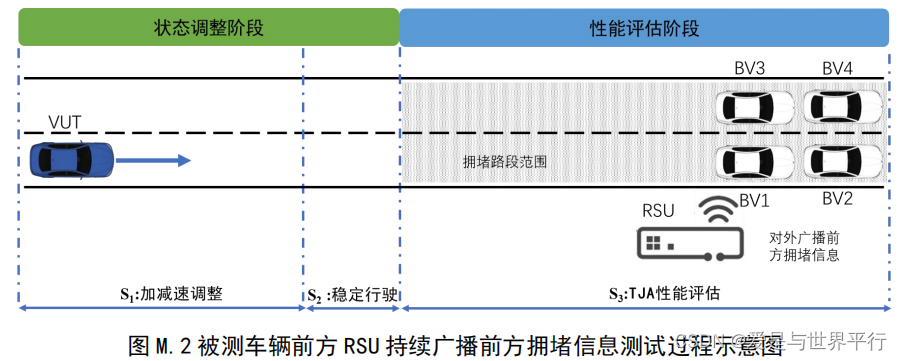
针对该测试场景,测试过程如图N.2所示,测试步骤如下:
a) 被测车辆由静止加速至目标车速后保持稳定行驶,此时应满足被测车辆距离进入前方拥堵信息覆盖范围的沿车道纵向距离大于 50 m;
b) 测试系统应在被测车辆入性能评估阶段之前开始采集数据,RSU 持续广播前方拥堵信息,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 TJW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
N.1.3 通过性条件
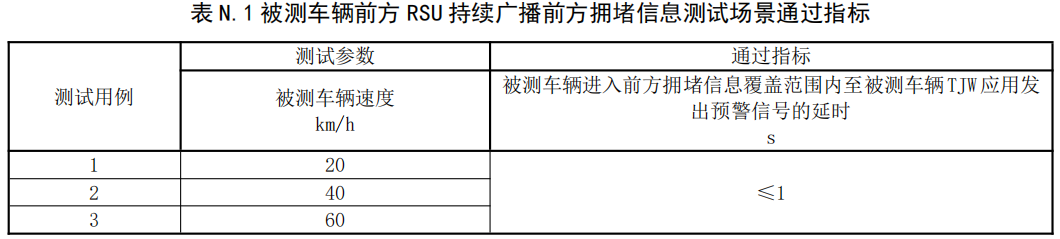
针对该测试场景,被测车辆应通过表N.1规定的所有测试用例。
被测车辆TJW应用应及时发出预警信号,且预警时机应满足表N.1规定的通过指标。
附录O 紧急车辆提醒测试场景
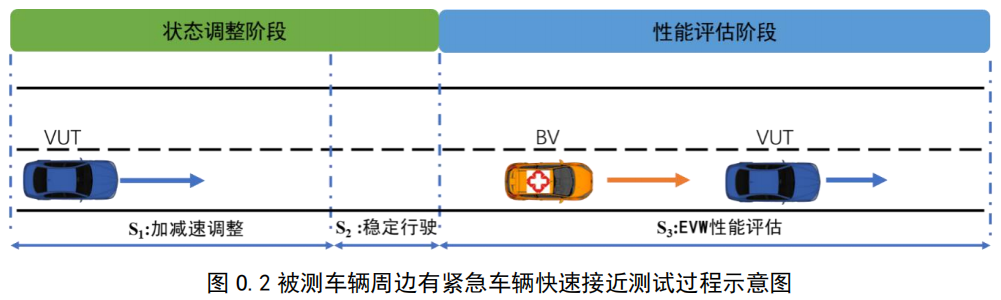
O.1 被测车辆后方有紧急车辆快速接近
O.1.1 场景描述及功能要求
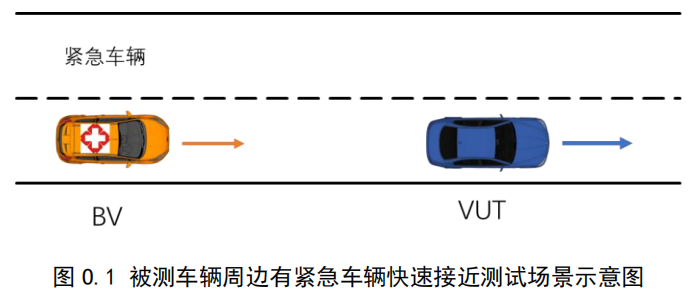
被测车辆匀速行驶,同车道或左/右相邻车道后方有背景车辆同向行驶快速接近,背景车辆为紧急车辆类型,开启报警器并持续广播紧急车辆信息(至少包括车辆类型),见图O.1,当被测车辆和背景车辆纵向距离满足一定条件时,被测车辆EVW应用发出预警,提醒驾驶员周边有紧急车辆。
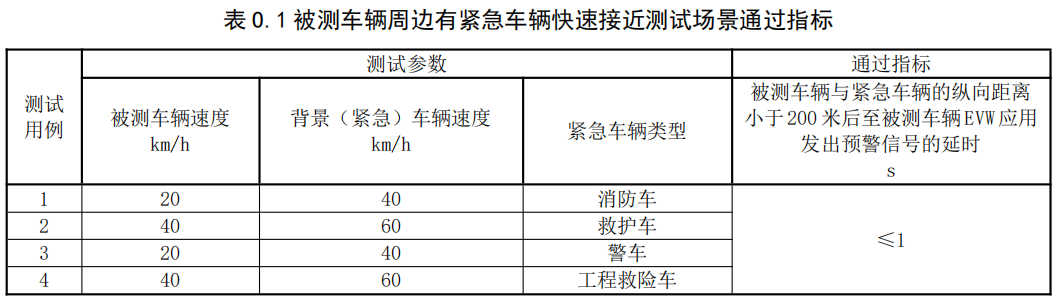
在该测试场景下,EVW应用应在以下测试场景参数范围内正常工作:
——被测车辆速度:0 km/h~最大设计速度;
——背景(紧急)车辆速度:10 km/h~最大设计速度;
——背景(紧急)车辆类型:警车、消防车、救护车、工程救险车。
O.1.2 测试步骤
针对该测试场景,测试过程如图O.2所示,测试步骤如下:
a) 被测车辆与背景车辆由静止加速至目标车速后保持稳定行驶,此时应满足被测车辆与背景车辆纵向距离大于 200 m;
b) 测试系统应在被测车辆入性能评估阶段之前开始采集数据,被测车辆进入性能评估阶段时,持续采集数据。驾驶员应保持注意力高度集中,确保试验安全性;
c) 被测车辆 EVW 应用触发预警或达到最晚预警时机仍未触发预警,则测试结束。
O.1.3 通过性条件
针对该测试场景,被测车辆应通过表O.1规定的所有测试用例。
被测车辆EVW应用应正确识别紧急车辆类型并及时发出预警信号,且预警时机应满足表O.1规定的通过指标。
附录P 预警时机计算方法
P.1 碰撞类预警时机计算方法
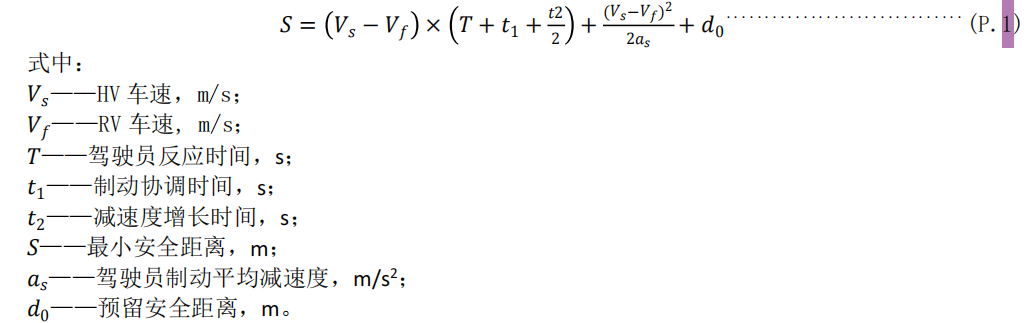
存在碰撞可能性的应用场景中,应用发出预警的时刻须保证被测车辆与目标之间有足够的时间或距离用于驾驶员做出反应以及车辆制动至安全车速,以避免碰撞的发生。过早发生预警影响驾驶员的驾驶体验,过晚发生预警有可能会导致安全事故。因此,预警时机的选择可以根据驾驶员的平均反应时间与平均制动减速度进行计算。本文件中,采用如图R.1车辆间最小安全距离模型,说明车辆制动过程。

参考GB/T 33577,我国驾驶员的平均反应时间在0.3 s~2 s之间,驾驶员制动平均减速度为3.6m/s^2~7.9 m/s^2。本文件中,选取0.4 s的反应时间7.9 m/s^2 的减速度作为最晚预警时刻的计算条件。
选取1.2 s的反应时间与3.6 m/s^2 的减速度作为最早预警时刻的计算条件。
参考GB 7258,制动协调时间取值为0.35 s~0.6s之间。本文件中,制动协调时间为0.5 s,减速度增长时间为0.2 s,静止时安全距离为3 m。
本文件中,假设车辆发生碰撞前处于匀速运动状态,采用预警时刻的最小安全距离作为是否发出预警的判断条件。根据R.1的计算模型,预警时刻的最小安全距离计算公式如下:
P.2 车辆关键信息提示类场景预警时机计算方法
城市道路车辆故障警示牌应放置在50 m~100 m位置,高速道路150 m外。城市道路典型限速为40 km/h、60 km/h,高速道路典型限速为60 km/h、120 km/h。本文件中,将车辆异常与车辆失控作为车辆关键信息提示类场景考虑,最晚预警时机的选取如表P.1所示,不限制最早预警时机。


















 940
940

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









