







参考
人間クズ和Aaronworry的一定文章内容,感谢原作者
一、部分代码中的名词解释
看pdf的时候发现下面这一部分:
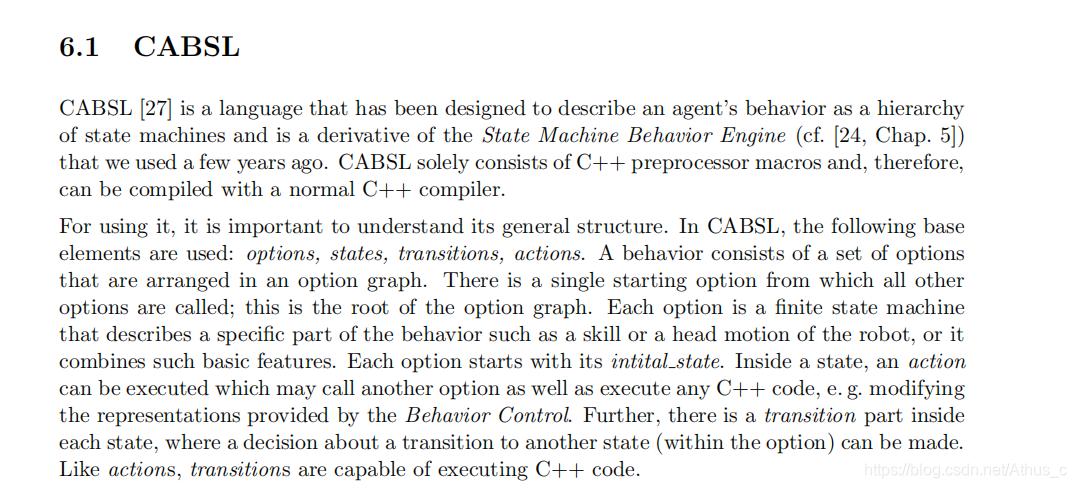
个人总结就是:options中的代码和普通的C++不同,option里的语法是CABSL结构,这些语法都是通过宏来实现的,可以理解成一种图结构的代码,每一个option就是一个图。
- option(name,xx,xx):括号中第一个参数为名字,一般与图的名字相同; 第二或以后的参数为变量,一般可省略。
例如:option(BigKick ,(KickRequest::KickMotionID)(KickRequest::kickForward) id, (bool)(true) mirror) - common_transition: 最高优先级,不管当前执行到该option的哪一个state,一旦满足条件就会结束当前行为,goto相应的state
- initial_state(stateName): 进option中的初始化状态,自动执行 initial_state中的行为。
- state:对应各种状态,其中state中可以有transition,这里的transition只在当前的state中判断,满足条件xxxxx,goto yyyyy state。action是当前state执行的行为,可以是某些函数或者跳到别的option中。
这里可以把state理解成一个while循环,一直循环action中内容,一旦满足transition中的条件即可跳出循环goto到对应state
注意:state(stateName): 状态,只能通过goto语句跳转。另外本身option也是一个状态,可以理解为state是option中的小状态。
二、关于一些底层文件的调用格式
先看另一篇关于bhuman文件结构的理解的文章:
https://blog.csdn.net/Athus_c/article/details/96144437
关于调用representations下的文件:the + str(Name).对象名,例如
theLibCodeRelease.timeSinceBallWasSeen
调用的是LibCodeRelease下的timeSinceBallWasSeen对象
三、对于bhuman文件中strike样本文件的注释帮助理解:
/** A test striker option without common decision */
option(Striker) //进攻球员
{
initial_state(start) //最先开始状态
{
transition
{
if(state_time > 1000)
goto turnToBall; //如果静止时间超过1000转向turntoball状态(下方)
}
action
{
HeadControlMode(HeadControl::lookForward); //执行底层的向前看动作
Stand();
}
}
state(turnToBall) //turntoball状态代码块
{
transition
{
if(theLibCodeRelease.timeSinceBallWasSeen > theBehaviorParameters.ballNotSeenTimeOut)
goto searchForBall; //如果未看到球时间超过超时时间(可以转到定义看到是7000)
下面续
这里附上对于ballnotseentimeout的定义截图:
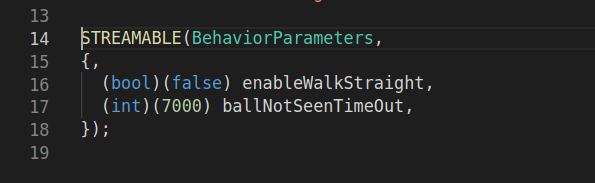
注意其中(int)(7000)ballnotseentimeout
接着看代码
接上面
if(std::abs(theBallModel.estimate.position.angle()) < 5_deg)
goto walkToBall; //如果角度小于5转向走向球动作
}
action
{
HeadControlMode(HeadControl::lookForward);
WalkToTarget(Pose2f(50.f, 50.f, 50.f), Pose2f(theBallModel.estimate.position.angle(), 0.f, 0.f));
} //转到定义发现walktotarget对应的有两个传入变量,速度和角度
下面续
附上walktotarget的定义截图:
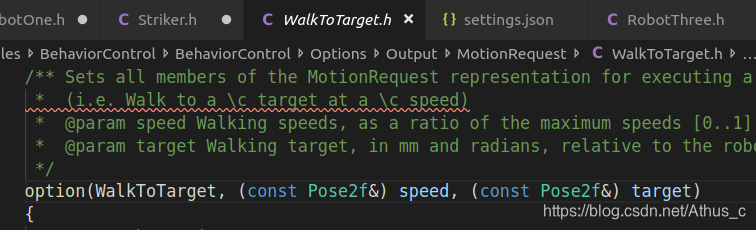
其中walktotarget里面的变量有两个,速度和目标
接着看代码
接上面
state(walkToBall)
{
transition
{
if(theLibCodeRelease.timeSinceBallWasSeen > theBehaviorParameters.ballNotSeenTimeOut)
goto searchForBall;
if(theBallModel.estimate.position.norm() < 500.f)
goto alignToGoal;
}
action
{
HeadControlMode(HeadControl::lookForward); //状态跳转之前头朝前站立
WalkToTarget(Pose2f(50.f, 50.f, 50.f), theBallModel.estimate.position);
}
}
state(alignToGoal)
{
transition
{
if(theLibCodeRelease.timeSinceBallWasSeen > theBehaviorParameters.ballNotSeenTimeOut)
goto searchForBall;
if(std::abs(theLibCodeRelease.angleToGoal) < 10_deg && std::abs(theBallModel.estimate.position.y()) < 100.f)
goto alignBehindBall;
}
action
{
HeadControlMode(HeadControl::lookForward);
WalkToTarget(Pose2f(100.f, 100.f, 100.f), Pose2f(theLibCodeRelease.angleToGoal, theBallModel.estimate.position.x() - 400.f, theBallModel.estimate.position.y())); //走到球的后面对准球门
}
}
state(alignBehindBall)
{
transition
{
if(theLibCodeRelease.timeSinceBallWasSeen > theBehaviorParameters.ballNotSeenTimeOut)
goto searchForBall;
if(theLibCodeRelease.between(theBallModel.estimate.position.y(), 30.f, 60.f)
&& theLibCodeRelease.between(theBallModel.estimate.position.x(), 150.f, 180.f)
&& std::abs(theLibCodeRelease.angleToGoal) < 2_deg)
goto kick;
}
action
{
theHeadControlMode = HeadControl::lookForward;
WalkToTarget(Pose2f(80.f, 80.f, 80.f), Pose2f(theLibCodeRelease.angleToGoal, theBallModel.estimate.position.x() - 170.f, theBallModel.estimate.position.y() - 40.f)); //再次对准球门
}
}
state(kick) //射门动作代码
{
transition
{
if(state_time > 3000 || (state_time > 10 && action_done))
goto start;
}
action
{
HeadControlMode(HeadControl::lookForward);
InWalkKick(WalkKickVariant(WalkKicks::forward, Legs::left), Pose2f(theLibCodeRelease.angleToGoal, theBallModel.estimate.position.x() - 160.f, theBallModel.estimate.position.y() - 55.f)); //表示机器人走到球的后方160mm,左方55mm处,朝着angleToGoal方向,使用左脚以forward的方式踢球。
}
}
state(searchForBall)
{
transition
{
if(theLibCodeRelease.timeSinceBallWasSeen < 300)
goto turnToBall;
}
action
{
HeadControlMode(HeadControl::lookForward);
WalkAtRelativeSpeed(Pose2f(1.f, 0.f, 0.f)); //原地旋转寻找球
}
}
}
其中InWalkKick(WalkKickVariant(WalkKicks::forward, Legs::left), Pose2f(theLibCodeRelease.angleToGoal, theBallModel.estimate.position.x() - 160.f, theBallModel.estimate.position.y() - 55.f));这个射门动作在kicktest分支中被替换成了bigkick,后面如果有研究会更新。














 3132
3132











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









