






常见机器人控制运动上位机源码,包涵多种运动算法。
支持marilink
提供技术文档
ID:5821740762759816
MZL电气

《常见机器人控制运动上位机源码及其运动算法分析》
摘要:
本文将对常见机器人控制运动上位机源码及其运动算法进行深入分析。首先介绍了上位机的基本概念和定义,然后详细讨论了常见的运动算法,并展示了支持marilink的运动控制软件的技术文档。通过对源码的分析和技术文档的解读,我们可以更加深入地了解机器人控制运动上位机的实现原理和功能特点。本文的目的是向读者提供一份详尽的技术分析文章,帮助他们更好地理解机器人运动控制领域的关键技术。
-
引言
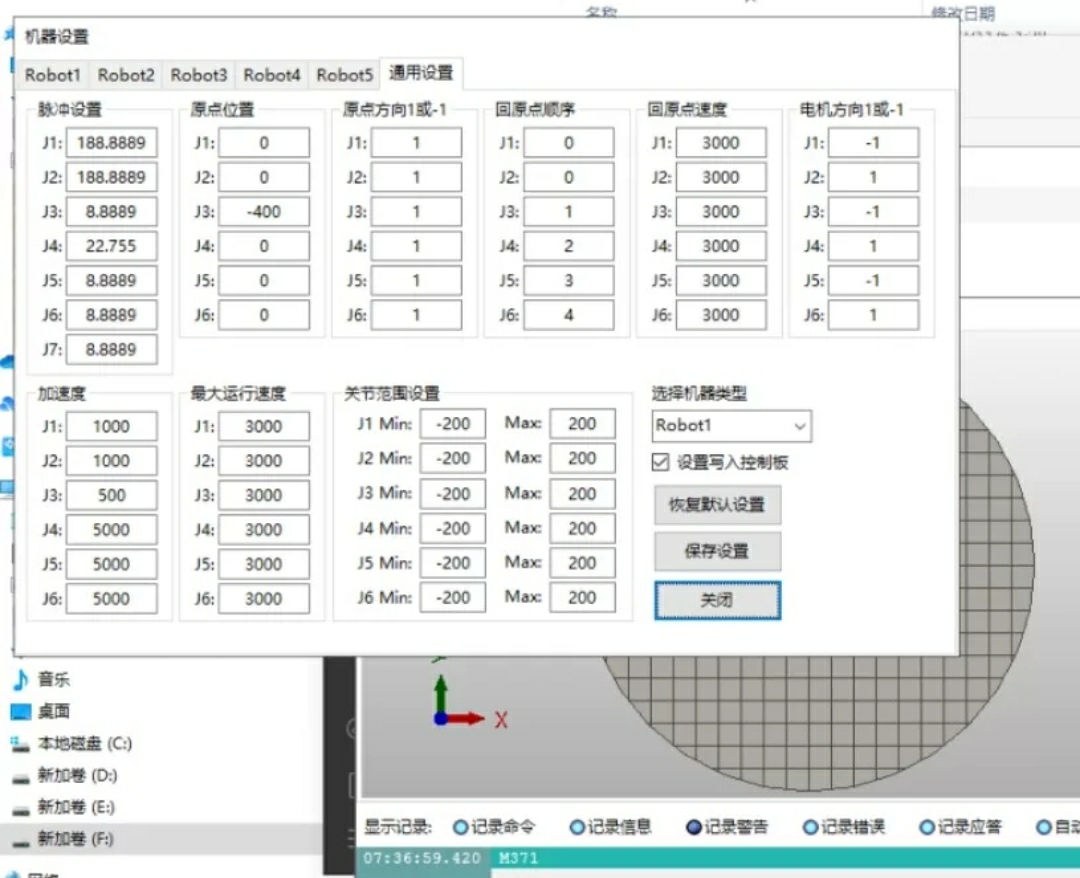
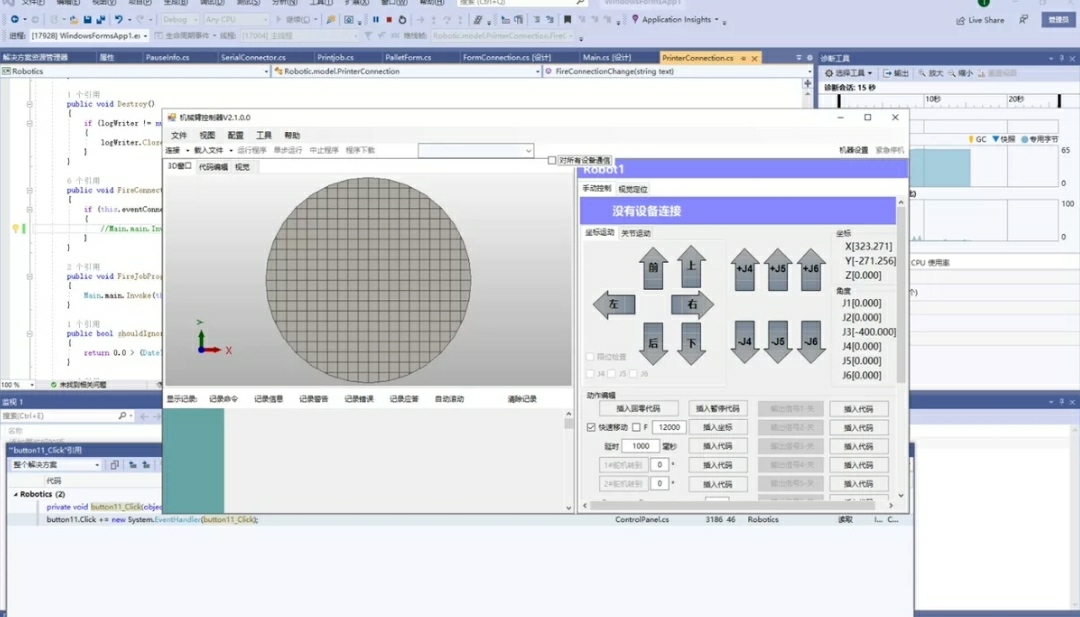
机器人运动控制是机器人技术领域的一个重要分支,上位机作为机器人控制系统中的核心部分,起到了重要的作用。上位机通过接收传感器数据和执行器指令,实现对机器人运动的控制和调度。常见的机器人控制运动上位机源码是开放源代码的,可以根据实际需求进行二次开发。本文将对常见的机器人控制运动上位机源码进行详细分析,并探讨其中所用到的多种运动算法。 -
上位机基础概念
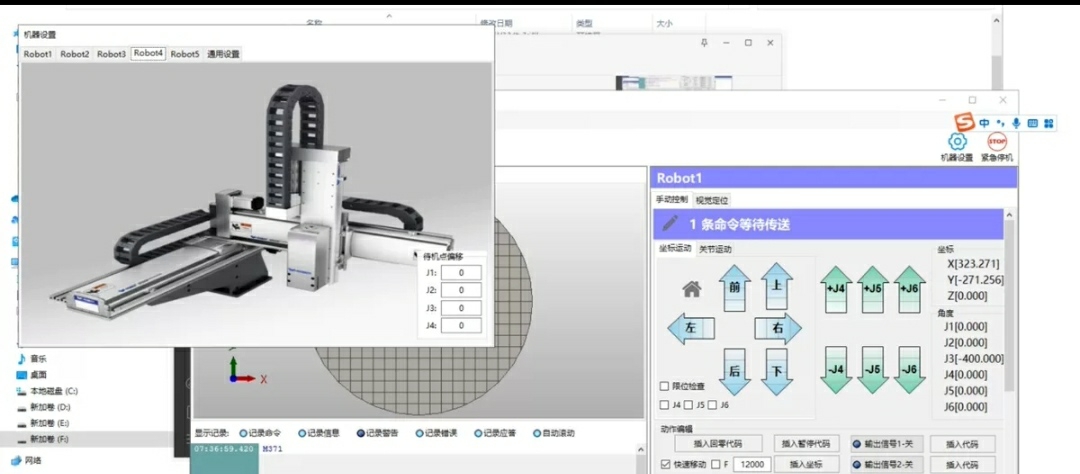
上位机是指连接在机器人控制系统中的一台计算机,通过上位机可以实现对机器人的远程监控、控制和调度。上位机通常包含了用于图形化操作界面的软件和与机器人控制系统通信的硬件接口。上位机的基础概念对于理解机器人控制运动上位机的源码和算法是非常重要的。 -
常见的运动算法
3.1 轨迹规划
机器人在执行任务时需要按照预定的轨迹进行运动。轨迹规划算法能够根据机器人的起始位置、目标位置和运动约束条件,生成一条平滑的运动轨迹,使机器人在整个运动过程中保持稳定。
3.2 动力学仿真
动力学仿真是指通过对机器人的物理特性进行建模,预测机器人在不同运动情况下的力学响应。动力学仿真算法可以帮助我们评估机器人在执行特定任务时的稳定性和安全性,优化运动控制策略。
3.3 传感器融合
机器人在运动过程中需要依赖多个传感器获取环境信息,传感器融合算法能够将不同传感器的数据进行融合,提高机器人在复杂环境中的感知能力和运动控制精度。
-
支持marilink的运动控制软件技术文档
marilink是一种常见的机器人控制总线协议,用于实现机器人控制系统中的数据传输和通信。本文提供了支持marilink的运动控制软件的技术文档,包含了软件的架构设计、通信协议、数据格式等详细信息,帮助读者更好地使用和开发基于marilink的机器人控制系统。 -
结论
本文对常见机器人控制运动上位机源码及其运动算法进行了深入分析。通过对源码和技术文档的解读,我们可以更加全面地了解机器人控制运动上位机的实现原理和功能特点。希望本文能够为读者提供一份高质量的技术分析文章,帮助他们在机器人控制运动领域取得更好的成果。
关键词:机器人控制运动上位机,源码,运动算法,marilink,技术文档。
【相关代码,程序地址】:http://fansik.cn/740762759816.html
















 453
453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









