







**一个时代来临了,同时,另一个时代即将过去。
——一个挚爱文学的烂笔头青年**
2014年夏伊始,智能汽车的衍生物,辅助驾驶、无人驾驶、自主驾驶、互联网汽车……突然在国内呼声大振,包括BAT、乐视、华为等互联网公司,以及以上汽为首的国内传统汽车巨头等,纷纷聚焦智能终端的又一前瞻领域——汽车行业。
面对此番场景,对于一个在无人驾驶煎熬了三年之久的小人物来说,稍感欣慰,是的,这一刻终究要来临。
“到2020年,掌握智能辅助驾驶总体技术及各项关键技术,初步建立智能网联汽车自主研发体系及生产配套体系。到2025年,掌握自动驾驶总体技术及各项关键技术,建立较完善的智能网联汽车自主研发体系、生产配套体系及产业群,基本完成汽车产业转型升级。 ”
——以上概括自《中国制造2025》。
如今,趋势已经很明朗——智能汽车要发展,形势很好。
于是乎,我来了,借此闲暇,抒发一下鄙人对于该领域的情怀。
从一张逻辑图说起——
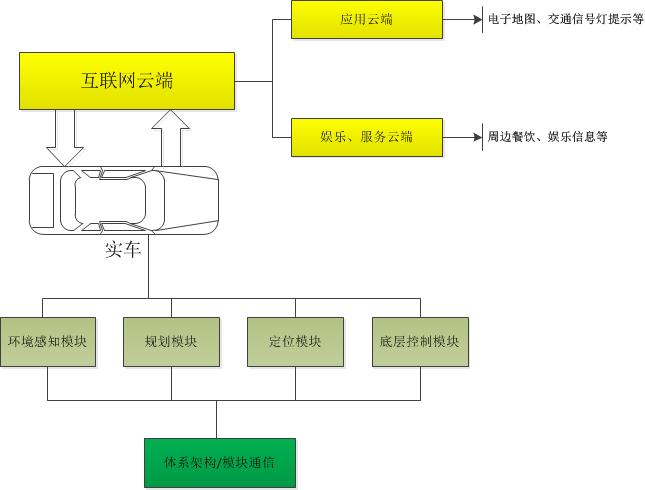
在此,暂且将传统汽车归结为汽车实体,就像智能手机保留了传统手机的通信等主流功能一样,智能化的汽车(包括互联网汽车、自主驾驶汽车等)也会是在传统汽车硬件基础之上进行升级、改造。整个智能汽车会分为相对独立的三部分:汽车实体、互联网层、自主驾驶层。
更进一步的讲,智能汽车对于传统的汽车制造业会产生哪些影响呢?
个人感觉,在可以预见的五到十年内,传统的汽车制造业会变为富士康此类的代工厂。换句话说,从利益分红角度来看,传统汽车行业可能没有更多油水可以榨取了。当然,新能源汽车是另外一回事,在此无关主题。
像阿里巴巴、百度、腾讯以及乐视、小米等互联网行业,更关注智能汽车的互联网层次。即,像智能手机一样武装智能汽车。所以高德地图(阿里巴巴旗下)、百度地图、腾讯地图一定是竞争的主流,而像提供通信服务的中国移动、联通、电信也会随之而来。因而,这一层次基本定位为互联网巨头的领地。以导航和车载娱乐系统为主流的互联网服务将是这部分的发展趋势。
好了,最后是自主驾驶。这一部分内容可以说是智能驾驶的核心。也是区别于传统汽车的最大不同。我并不认同在五到十年内可以完全实现全自主驾驶,但是有限的自主驾驶可以期待。
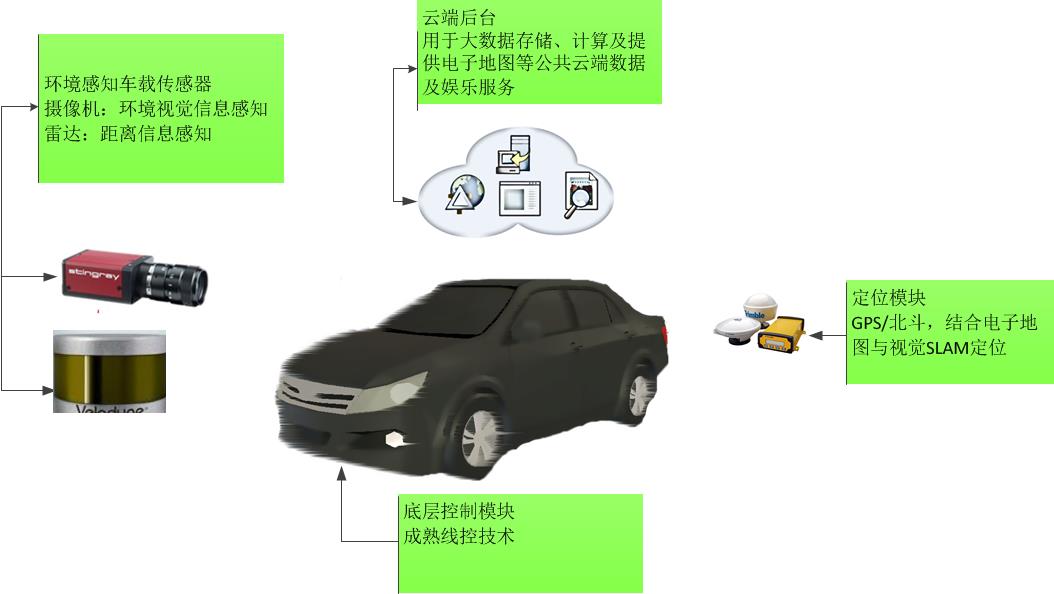
从现如今的一些研究高校和企业的体系架构可以分析出,自主驾驶大致分为:环境感知模块、规划模块、定位模块、底层控制模块等。
环境感知模块就现阶段的研究来看,还是以velodyne公司荣誉出品的激光雷达为主流的探测手段,至少对于能跑的自主驾驶汽车来说,当前是标配。(音响公司velodyne很开心哪!)当然,以Mobileye为首的视觉解决方案能够很好的进行车辆和行人识别及车道线检测。但是对于负责环境下的可通行区域提取,视觉方案当前还是略显能力不足。就未来发展趋势而言,如果立体视觉能够解决距离感知的短板,当然最好。(摄像头还是很便宜滴!)如若不然,就只能等着velodyne降价了。(抱歉,德尔福公司的毫米波能力也是很给力的,风雨无阻嘛)。在今后的博客后,会详述这一部分。
规划控制模块,从科研的发展而言,基本分为两派,以传统汽车控制出身的Optimus Prime派和以机器人控制出身的wall e派(Cool!)。Optimus Prime派以传统汽车的一些科研院所、企业为代表,从车体自身出发,在车辆底层控制方面底蕴深厚;而wall e派更多地把汽车作为轮式机器人看待,对于人工智能的理论研究了如指掌。从国内历年的中国智能车挑战赛来看,两方代表彼此还是有距离感的。究其缘由,还是谁为正统的问题。
Optimus Prime派评价wall e派——车盲,撞山车(当然,历年比赛中翻车、撞树屡见不鲜);wall e派则一副趾高气昂的样子,artificial intelligence!土包子懂个屁!
呵呵,以上仅供娱乐。其实现实中大家还是交流为主,毕竟做学术研究嘛。
言归正传,自主性的规划控制主要有两个矛盾:安全性和稳定性。安全性,简单说就是不能撞,稳定性主要对于横向和纵向控制。简单说来,方向盘不能频繁抖动(假如还保留的话),刹车、油门不能时有时无。当然,速度越高,对这两个问题的要求也就越发严格。另外,紧急情况下的避险(减速还是转向)还是要慎重选择的。
定位模块,除了一部分可以借用BAT三家的子公司来做外,对于精确定位(如车道定位、实时定位)和航向确定,SLAM是个不错的选择,视觉和雷达皆可。至于选用GPS还是北斗,呵呵,保留意见。
底层控制方面,传统汽车行业有优势,现在都底层都线控了,技术上不是问题。
综上来说,每个方面都有足够的技术储备,只是还不够好。借用某位我忘记名字的前辈的话说,智能驾驶从来不是一个新技术,它只是一个技术的融合。
说了这么多,可以来张图了。
希望我的分享可以帮到志同道合的你~















 2186
2186

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









