






这篇文章讲的不错,预测的各个方面都提到了,包括方法、指标、困境:
几篇关键的工作解读一下:
目录
1. LaneCGN
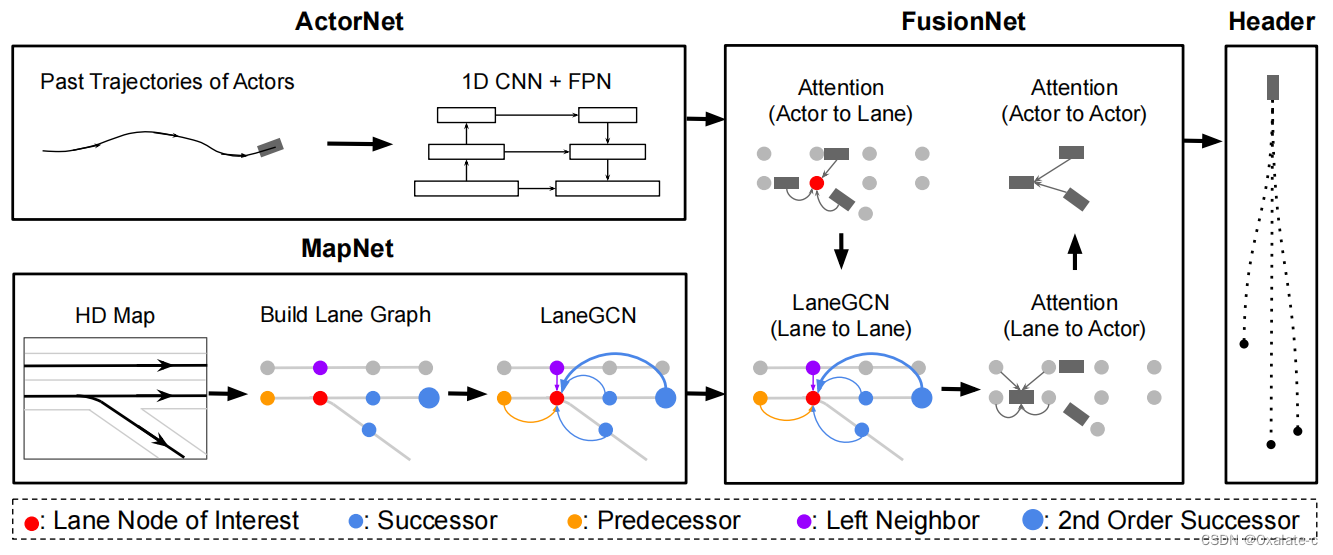
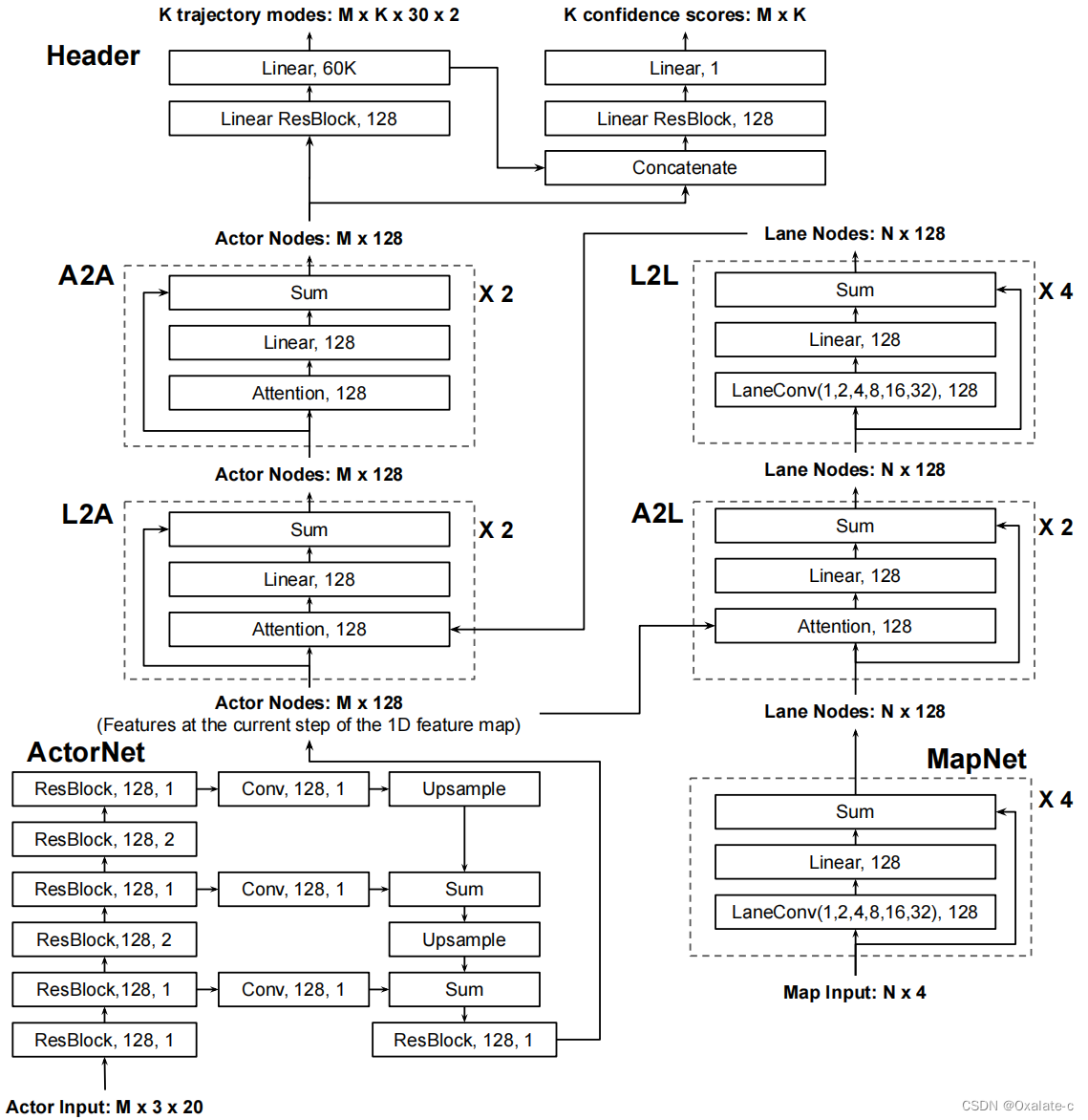
Learning Lane Graph Representations for Motion Forecasting, Uber 2020
论文:https://arxiv.org/pdf/2007.13732.pdf?utm_source
代码:https://github.com/uber-research/LaneGCN
自动驾驶运动预测-Uber LaneGCN模型-腾讯云开发者社区-腾讯云
详细解读:2007-Learning Lane Graph Representations - 知乎
重点:使用graph的方式来建模map,ActorNet提取障碍物特征,然后用A2L, L2L, A2A等方式融合不同特征信息。相比于传统的渲染图的形式,这种网络更轻便,建模更直接,效果更好;相比于VectorNet这种,建模更有针对性。
2. VectorNet
代码(非官方):https://github.com/Henry1iu/TNT-Trajectory-Prediction 网友尝试复现了VectorNet,整体是用GNN的方式复现的,代码稍微写的有点乱。在DenseTNT的官方代码里,Encoder部分基本上使用Attention的方式实现的,当然本质上来说是相似的,不过官方代码的写法要清晰一点。
详细解读:自动驾驶运动预测-VectorNet论文复现(一)-腾讯云开发者社区-腾讯云 (有详细的数据结构的组织说明)
重点:VectorNet,TNT,DenseTNT是赵行老师的三部曲。VectorNet主要解决的是Encoder部分的设计问题。与LaneGCN类似,也是用了矢量化的环境表达,区别在于这里整体统一了地图和障碍物的部分,均用矢量化的信息进行表达。
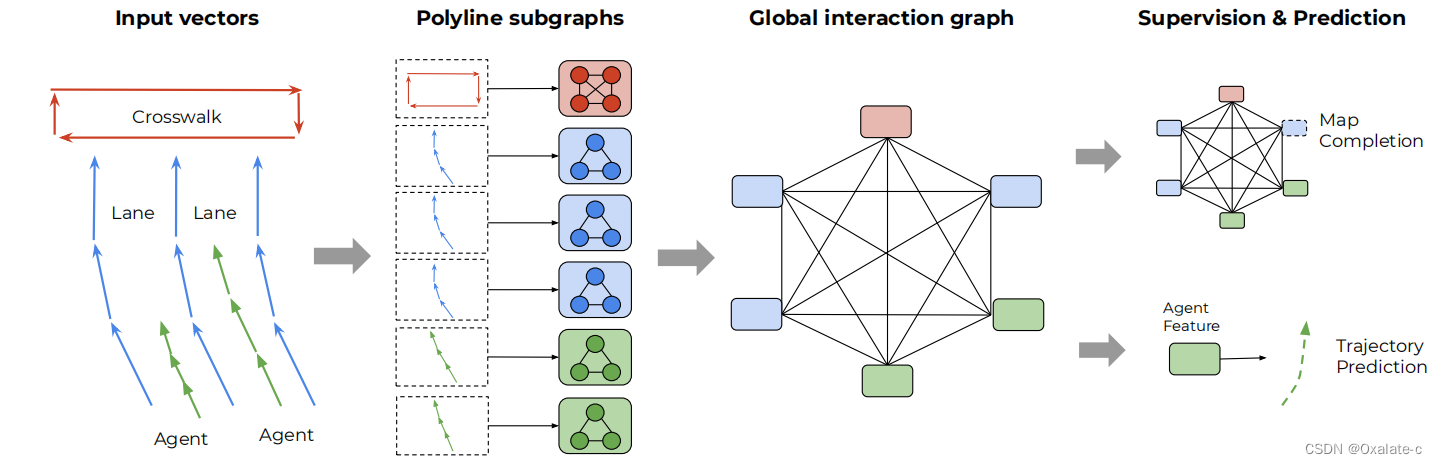
其中,subgraph的实现:

3. TNT
TNT: Target-driveN Trajectory Prediction, Waymo 2020
论文:https://proceedings.mlr.press/v155/zhao21b/zhao21b.pdf
详细解读:轨迹预测模型之——TNT - 知乎
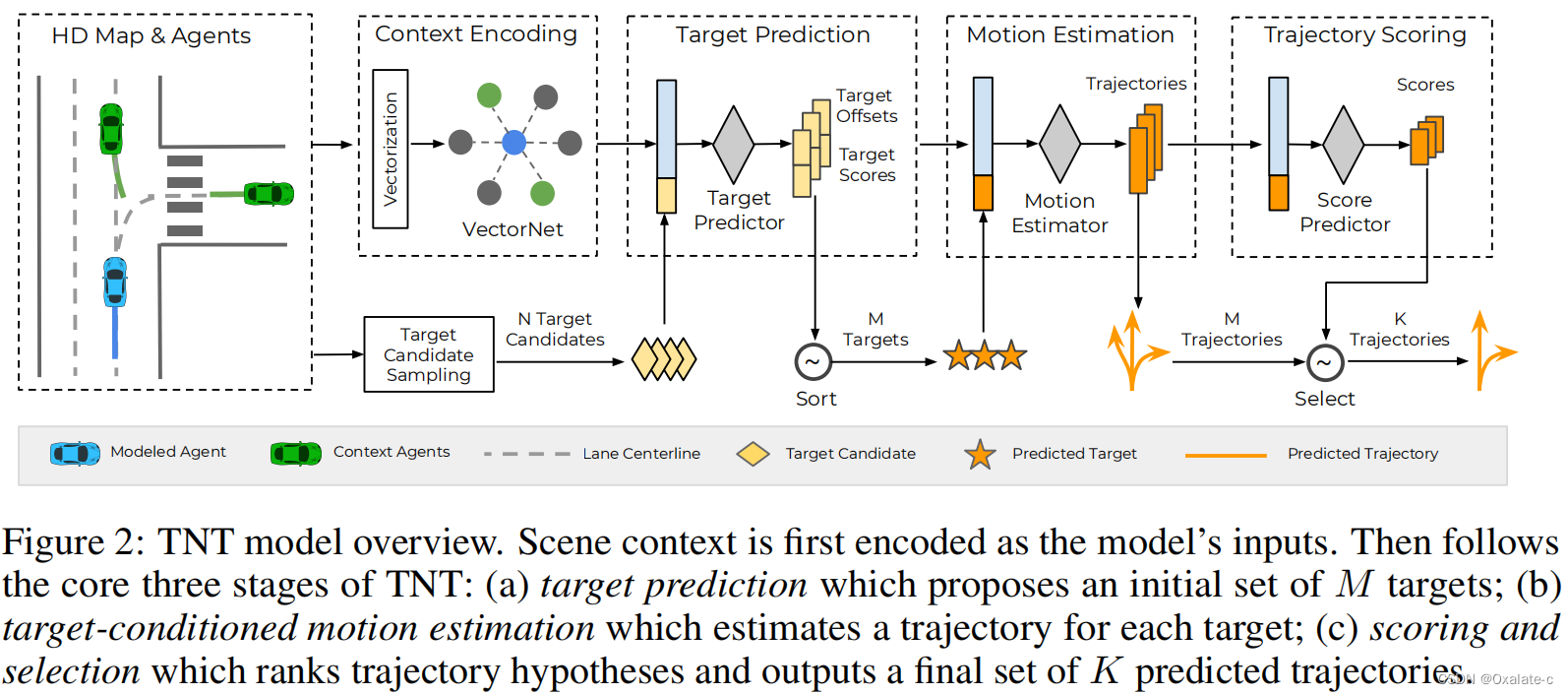
重点:(1)这是基于anchor based思想的预测工作,是基于VectorNet的Encoder,在Decoder上的提高版。对于以前的轨迹预测,通常就是几个MLP、GRU直接decode轨迹出来,这种方式其实轨迹的末端是控制不好的。但是我们考虑实际的轨迹预测过程,要以终为始来看问题,一般是先确定目标点(goal,target)点,再确定轨迹,所以TNT利用了这种思想。(2)几个关键的步骤:VectorNet类的环境编码、基于拓扑采样候选的锚点(anchor)、基于这些anchor得到候选点target(以offset和score来表示)、筛选topM个target点、基于target点来补全轨迹、基于补全的轨迹簇再打分得到topK轨迹。(3)整个预测过程阶段很多,因此需要teacher force的训练。(4)整体思路是通过确定候选点 + 选择最优的方式来得到结果,比纯生成式的轨迹要更可控一些。
4. DenseTNT
DenseTNT: End-to-end Trajectory Prediction from Dense Goal Sets,清华 2021
代码(官方):https://github.com/Tsinghua-MARS-Lab/DenseTNT 代码应该是涵盖了VectorNet、TNT、DenseTNT的内容,也囊括了LaneGCN的简单实现,不过整体都是基于Attention来实现的。
详细解读:【轨迹预测系列】【笔记】DenseTNT:End-to-end Trajectory Prediction from Dense Goal Sets - 知乎
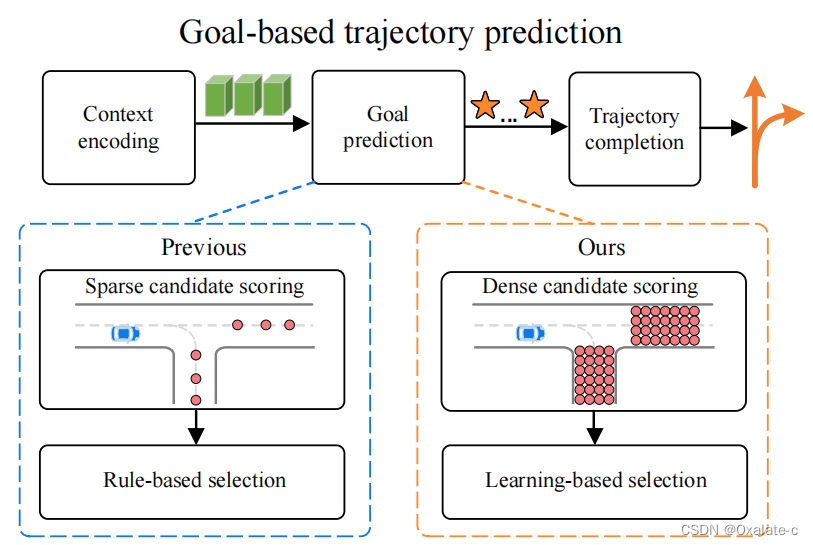
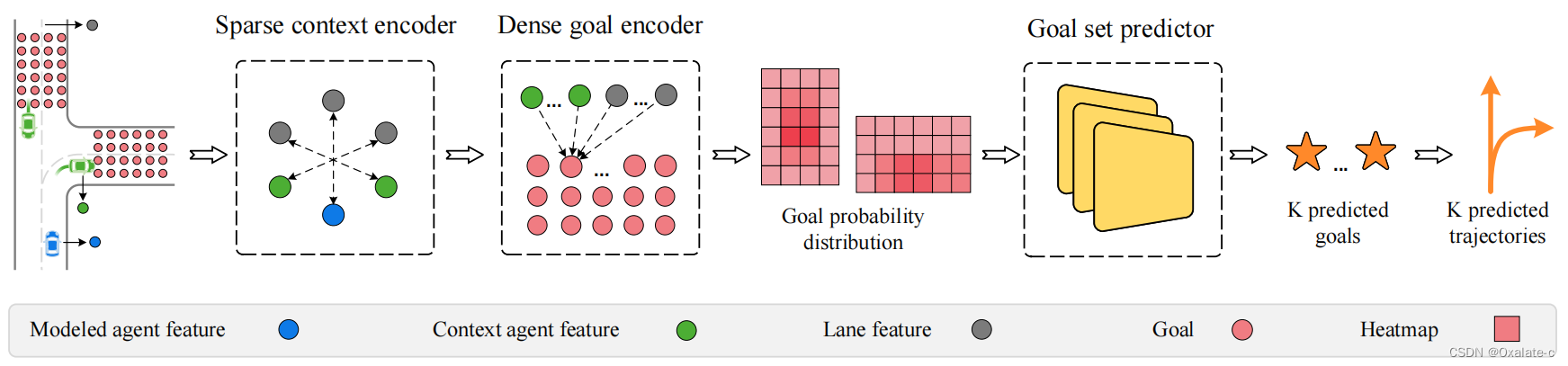
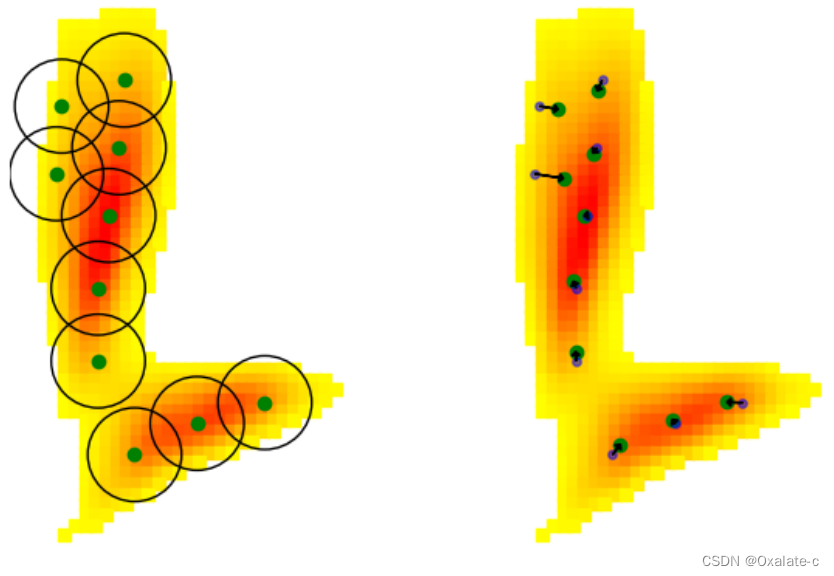
重点:本工作是TNT的再升级版,看上去有点花哨了,从实用的角度应该TNT就够了。主要步骤:(1)VectorNet的backbone。(2)因为要dense的去撒点(基于道路中心线以固定间隔取点 + offset),为了降低算力消耗,先做LaneScore,筛掉得分低的车道。(3)计算每个denseGoal的概率,因为goal是非常稠密的,所以作者认为是得到了goal probablity distribution。(4)稠密Goal点的问题来了,就是如何选择最后合适的Goal保留下来?需要有代表性来保持预测的多模性,又要概率足够高。所以作者搞了一个Goal set predictor,这个是用优化的方法做监督去学的。(5)Trajectory Completion,这个和TNT类似。综上,整体把Goal点搞密,带来了一些多余的问题,在训练和推理阶段都显得有点过于麻烦了。
5. HOME
HOME: Heatmap Output for future Motion Estimation,Huawei 2021
论文:https://arxiv.org/pdf/2105.10968.pdf

6. SceneTransformer
Scene Transformer: A Unified Architecture for Predicting Multiple Agent Trajectories, Waymo 2022
论文:https://arxiv.org/pdf/2106.08417.pdf
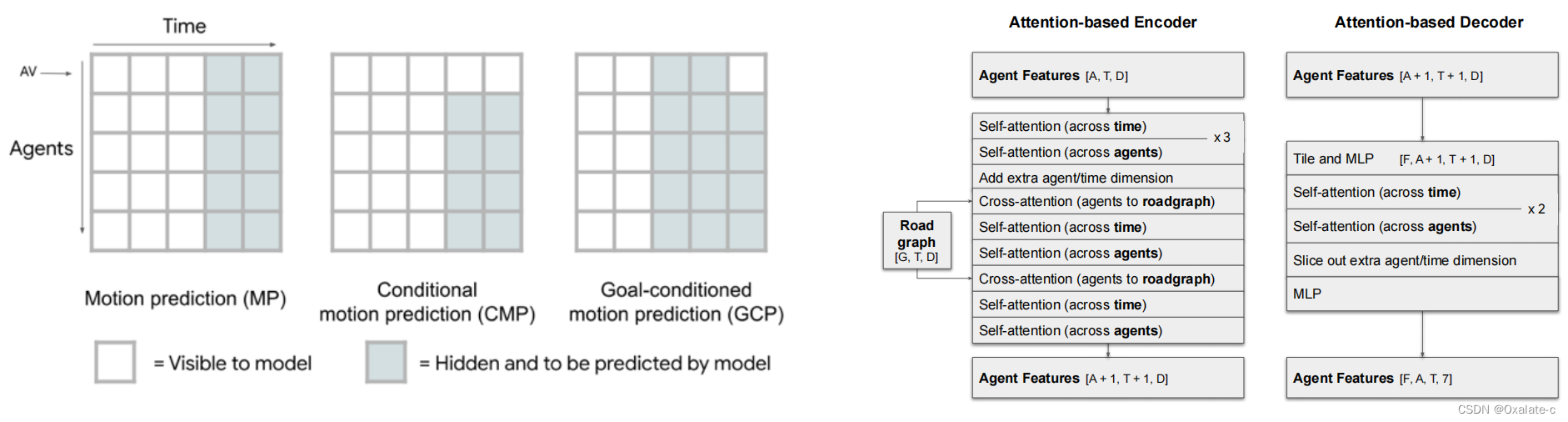
重点:(1)sceneTransformer的重要意义在于,从本文开始,真的是从整个场景的角度去建模、预测和与决策,所有障碍物的信息统一考虑到系统中。下图中的输入信息的组织方式,就支持了各类工作:如goal-free的marginal的预测、conditional的预测、goal-based的预测。(2)大多数的数据集还是marginal的,conditional的预测还是看的Waymo自己的比赛:Interaction Prediction challenge in WOMD。
















 2198
2198











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









