










车辆轨迹预测有效,但并非无处不在
原文链接
[2112.03909] Vehicle trajectory prediction works, but not everywhere (arxiv.org)
研究背景
现有预测模型无法推广到新的场景中,由于场景生成方法改变了场景,使得训练过程中几乎不包含关于未来轨迹的信息,因此导致在新场景中鲁棒性差
研究问题
如何有效生成有效的真实的新场景?
如何评估现有轨迹预测模型?如何证明生成场景的真实性?
能否利用生成的场景提高预测模型的鲁棒性?
解决方案
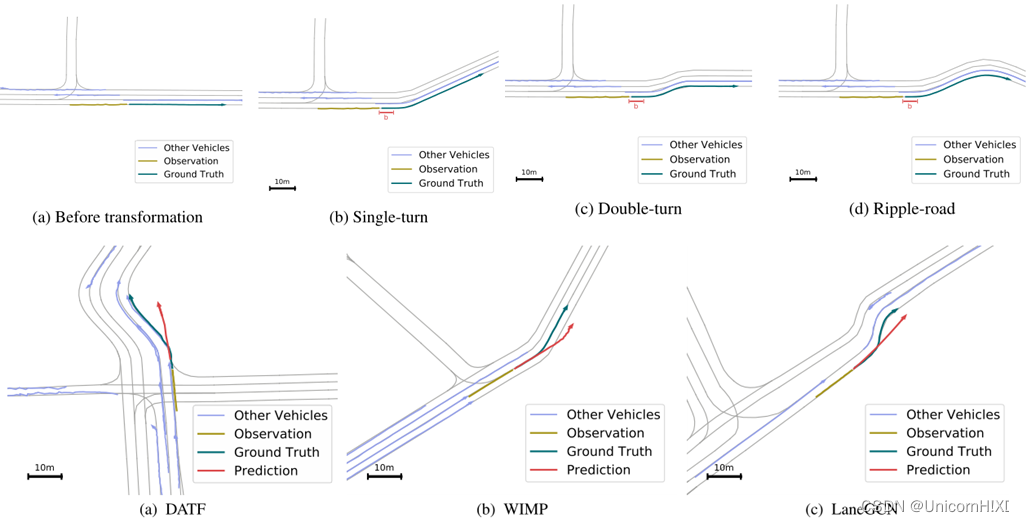
对抗性自动生成逼真场景
搜索方法寻找具有挑战性的真实驾驶场景,具体到每个轨迹预测模型
效果
使用在Argoverse公共数据集上训练的三种最先进的轨迹预测模型(LanGCN,DATF,WIMP),研究模型可转移性鲁棒性,LaneGCN微调后鲁棒性增加,DATF,WIMP鲁棒性不佳
证明物理约束是使场景可行的必要条件
LaneGCN(图卷积网络): Argoverse预测挑战的首选方法之一,是一个多模态预测模型,同时还提供了各模态的概率,考虑概率最大的模态
DATF :一种基于流量的方法,使用交叉熵损失来鼓励产生对道路的预测。由于该多态模型不提供每一模态的概率,因此考虑最接近基本事实的概率 Diverse and admisible trajectory forecasting through multimodal context understanding.通过多模态语境理解进行多元可接受轨迹预测
WIMP:一种使用场景关注模块和动态交互图来捕捉几何关系和社会关系。由于该多态模型不提供每一模态的概率,因此考虑最接近基本事实的概率 What-if motion prediction for autonomous driving.
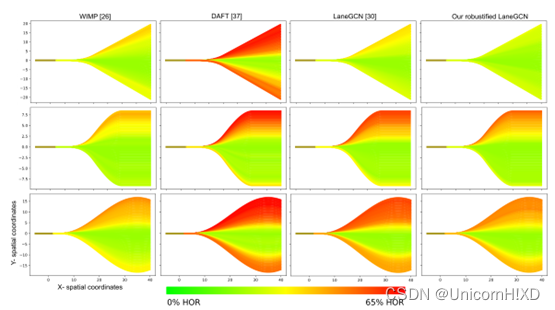
热度图表明,模型更容易受到较大的转换参数的影响。红色表示在这些场景中有更多的越野预测,绿色表示更高的可接受性。通常模型在高曲率时轮流失效。例如,更剧烈的转弯。此外,它显示更多的越野在左转弯比右转弯。这可能是由于数据集中的偏差。在鲁棒模型中可以看到一个明显的改进
HOR:offroad在预测轨迹点中至少发生一次offroad的场景百分比
SOR:offroad预测点占所有预测点的百分比
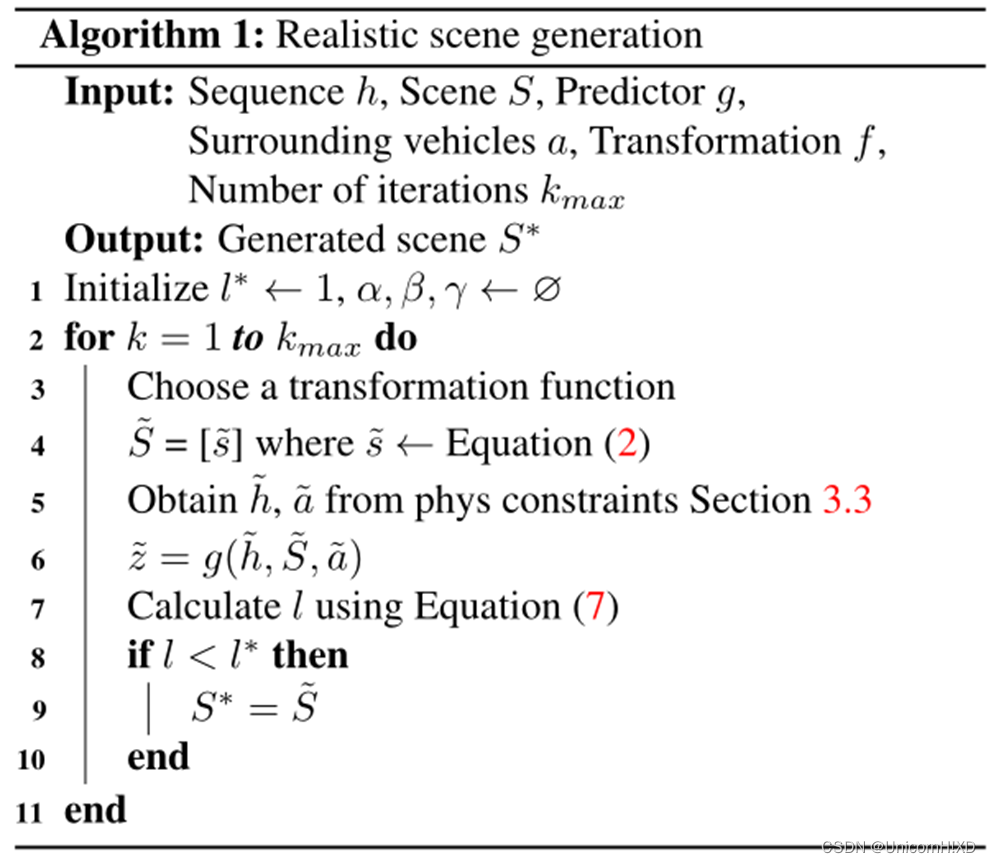
算法:
算法被Kmax迭代,每次迭代中,选择一个变换函数,然后由变换函数生成相应的场景,然后对观测轨迹进行缩放以确保场景的可行性。接下来在新场景中预测,并用于计算loss,最佳损失决定最终生成的场景















 832
832











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









