






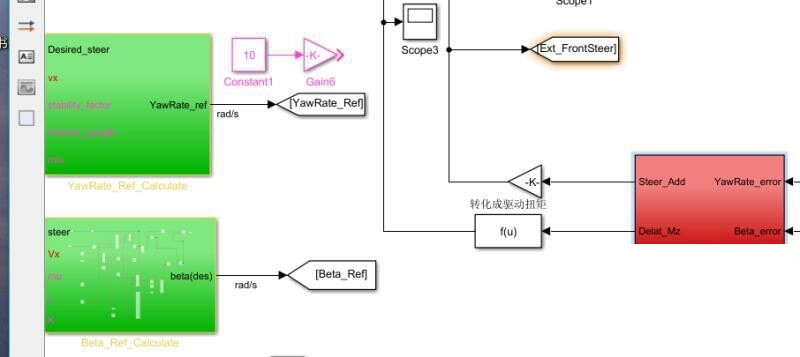
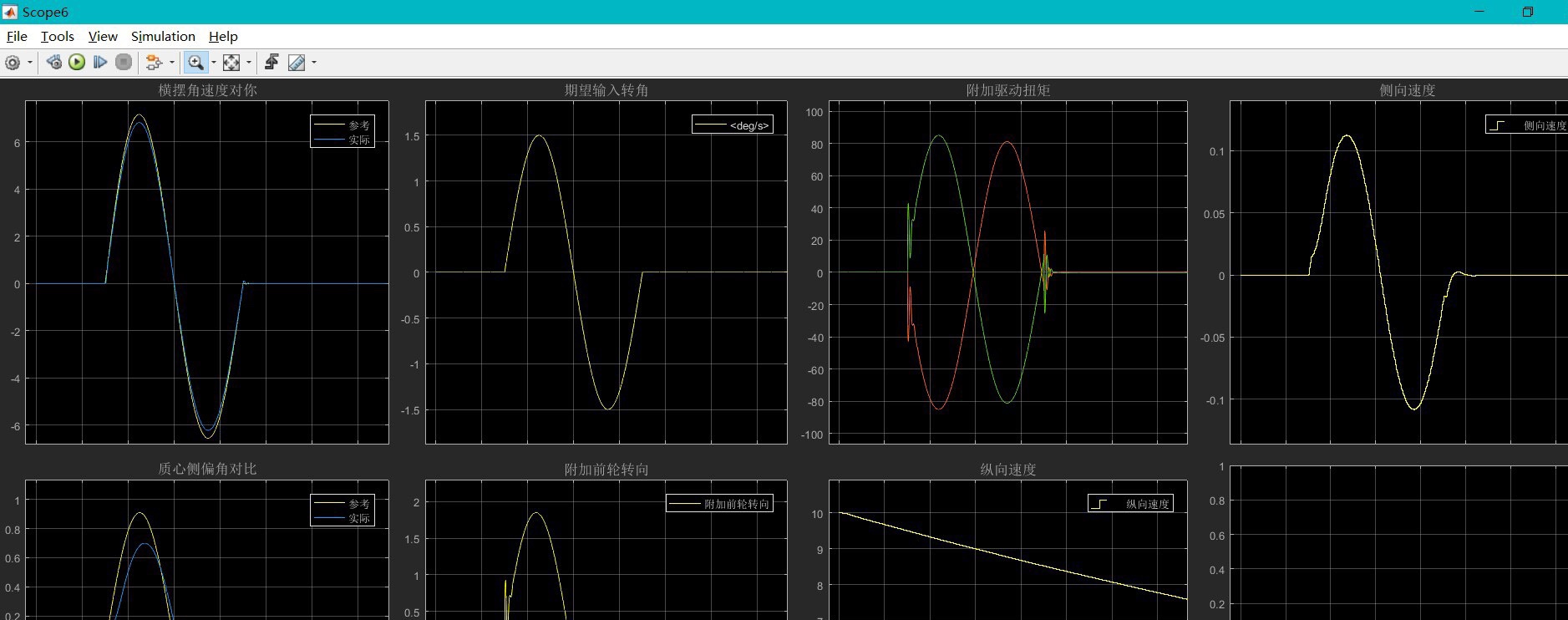
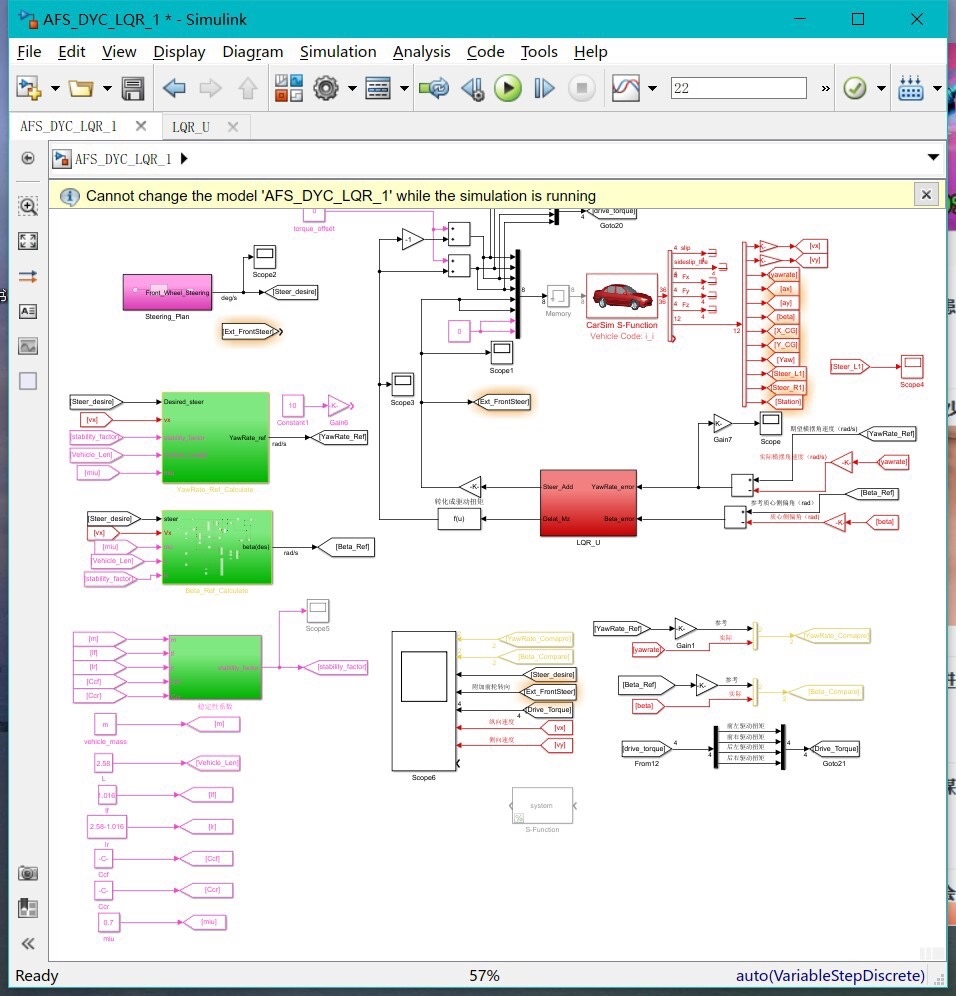
四轮独立驱动横摆角速度控制,LQR 基于LQR算法的 基于二自由度动力学方程,通过主动转向afs和直接横摆力矩dyc实现的横摆角速度跟踪 ,模型包括期望横摆角速度,质心侧偏角,稳定性因素,lqr模块等模块,作为lqr入门强烈推荐。
还有详细的lqr资料说明,可以作为基本模板,和其他算法(mpc smc)做对比等
YID:92100682395427922
想剁手书屋14
四轮独立驱动横摆角速度控制是一种基于LQR算法的控制方法。通过控制车辆的横摆角速度,可以实现车辆的稳定性和转弯性能的优化。本文将介绍这种控制方法的原理和应用,以及与其他算法(如MPC、SMC)的比较。
在四轮独立驱动的横摆角速度控制中,LQR算法被广泛应用。LQR算法是一种最优控制方法,通过调节系统的状态反馈增益矩阵,使系统输出响应最优。在控制车辆横摆角速度时,LQR算法可以根据车辆的动力学方程和期望的横摆角速度,计算出适当的控制输入,以实现角速度跟踪的目标。
基于LQR算法的四轮独立驱动横摆角速度控制系统包括几个关键模块。首先,需要建立车辆的动力学方程,这是控制系统的基础。动力学方程描述了车辆在不同车速、操纵输入和外部环境条件下的运动规律。其次,需要设定期望的横摆角速度,即车辆在转弯时期望达到的角速度值。这个期望值可以根据具体应用需求进行设定。同时,还需要考虑车辆的质心侧偏角,这是影响车辆稳定性的重要因素之一。通过控制车辆的侧偏角,可以使车辆保持稳定的转弯性能。最后,LQR模块是整个控制系统的核心,它通过计算状态反馈增益矩阵,实现对车辆横摆角速度的控制。
LQR算法在四轮独立驱动横摆角速度控制中具有较强的优势。首先,LQR算法可以快速收敛到期望的横摆角速度,从而提高系统的响应速度。其次,LQR算法可以适应不同的工况和环境条件,在不同速度范围内保持稳定性和转弯性能。此外,LQR算法还可以通过调节状态反馈增益矩阵,实现对车辆运动的优化,使其更符合实际需求。
除了LQR算法,还有其他的控制算法可以用于四轮独立驱动横摆角速度控制,如MPC和SMC算法。MPC算法是一种模型预测控制方法,它通过对车辆运动进行预测,生成最优的控制输入。与LQR算法相比,MPC算法可以更好地处理约束条件和不确定性。而SMC算法是一种滑模控制方法,它通过引入滑模面来实现对系统的鲁棒控制。与LQR算法相比,SMC算法具有较强的鲁棒性和非线性控制能力。
综上所述,四轮独立驱动横摆角速度控制是一种基于LQR算法的控制方法,可以优化车辆的稳定性和转弯性能。通过控制车辆的横摆角速度,可以实现对车辆运动的精确控制。与其他算法相比,LQR算法具有较快的响应速度和较好的适应性。这使得LQR算法成为了控制车辆横摆角速度的一种强大工具。同时,研究者们还可以通过与其他算法(如MPC、SMC)的比较,进一步优化控制性能和鲁棒性。
总之,四轮独立驱动横摆角速度控制在车辆控制领域具有重要的应用价值。通过合理设计控制算法和系统结构,可以实现车辆运动的高精度控制和优化。因此,对于刚入门的LQR算法的研究者来说,四轮独立驱动横摆角速度控制是一个很好的研究方向,也是一个值得深入探究的领域。
以上相关代码,程序地址:http://wekup.cn/682395427922.html















 480
480











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









