







 本文详细描述了一种无传感器矢量控制方法,利用磁链观测器和SVPWM技术,实现在不同速度范围的高精度控制,移植至TMS320F28335和STM32F107,并通过实验验证其性能。
本文详细描述了一种无传感器矢量控制方法,利用磁链观测器和SVPWM技术,实现在不同速度范围的高精度控制,移植至TMS320F28335和STM32F107,并通过实验验证其性能。
感应异步电机的无传感器矢量控制,完整的C代码+仿真模型:
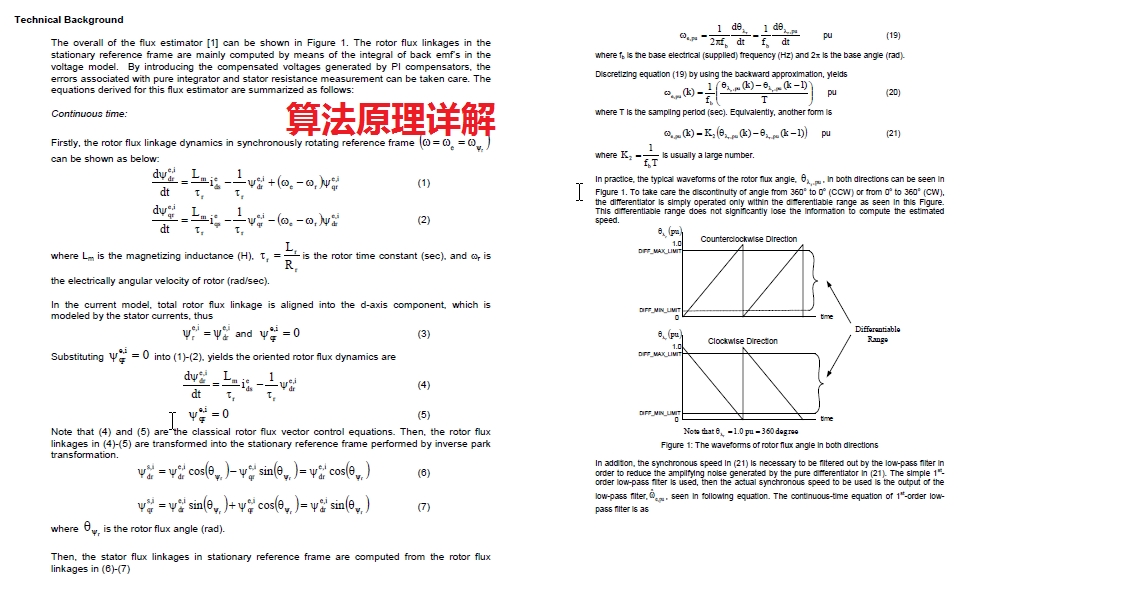
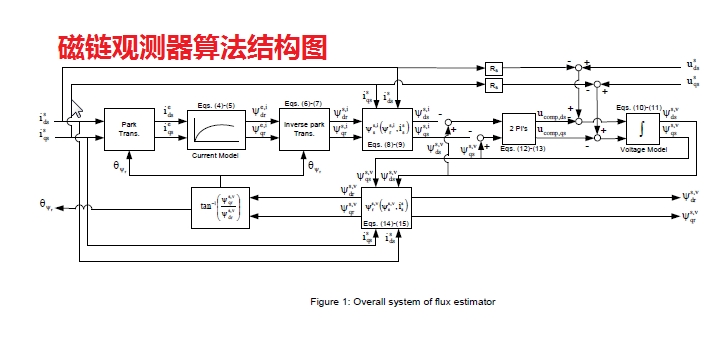
1. 基于“电压模型+电流模型”的磁链观测器,实现转子磁场定向控制(FOC),可实现电机在低速、中高速段的高精度的转速估算;
代码已经成功移植到DSP芯片(TMS320F28335)和STM32F107中,对一台额定功率为33kW的异步电机进行了无传感器矢量控制,波形和试验台架数据见下图。
2. 可实现电机带满载零速启动,抗负载扰动性强,响应速度快,控制精度高;
3. SVPWM空间电压矢量调制,定子电流波形的畸变率低;
4.采用S-Function的方式,把C代码直接在simulink下进行仿真,所见即所得
5.详细的算法原理推导,跟程序代码是完全对应的。
YID:89300676415301211
专业电机控制

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 941
941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









