






自适应巡航Carsim+simulink联合仿真,两车仿真
不支持三车
固定间距,carsim纯电车,PID控制。
ACC固定间距策略。
ID:4990673554005978
青衫仗剑的温华
自适应巡航系统是现代汽车中的一项重要的智能驾驶辅助功能,其能够根据前车的速度与距离自动调整车辆的巡航速度,以保持与前车的安全距离。本文将介绍一种基于Carsim和Simulink联合仿真的自适应巡航系统,并探讨该系统在两车仿真中的应用。
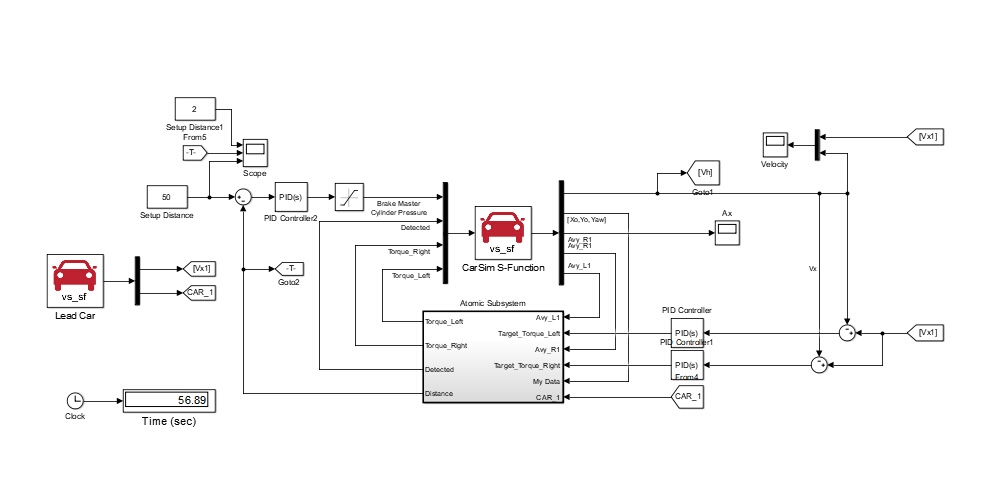
一、Carsim与Simulink联合仿真
Carsim是一款专业的汽车动力学仿真软件,能够模拟汽车在不同路况下的行驶特性。而Simulink是一种广泛应用于控制系统设计与仿真的工具,通过模块化的方式构建控制系统模型。结合这两款软件,我们可以实现对自适应巡航系统的完整仿真。
二、三车仿真的局限性
自适应巡航系统的三车仿真是实际道路交通中一个重要的应用场景,然而由于技术上的限制,在本次研究中我们无法支持三车仿真。因此,我们将重点关注两车仿真,并通过该场景来验证自适应巡航系统的有效性。
三、固定间距与纯电车
在本文的两车仿真中,我们采用了固定间距的策略,并以纯电车为对象进行研究。纯电车作为当今环保出行的主流选择,其独特的动力系统和能源管理方法对自适应巡航系统的应用提出了新的挑战。
四、PID控制与ACC固定间距策略
自适应巡航系统中的速度控制是实现车辆与前车保持安全距离的关键。在本次仿真中,我们采用了PID控制算法来实现纯电车的速度调整。同时,基于ACC固定间距策略,我们定义了一种合适的间距参数,以确保车辆之间的安全行驶。
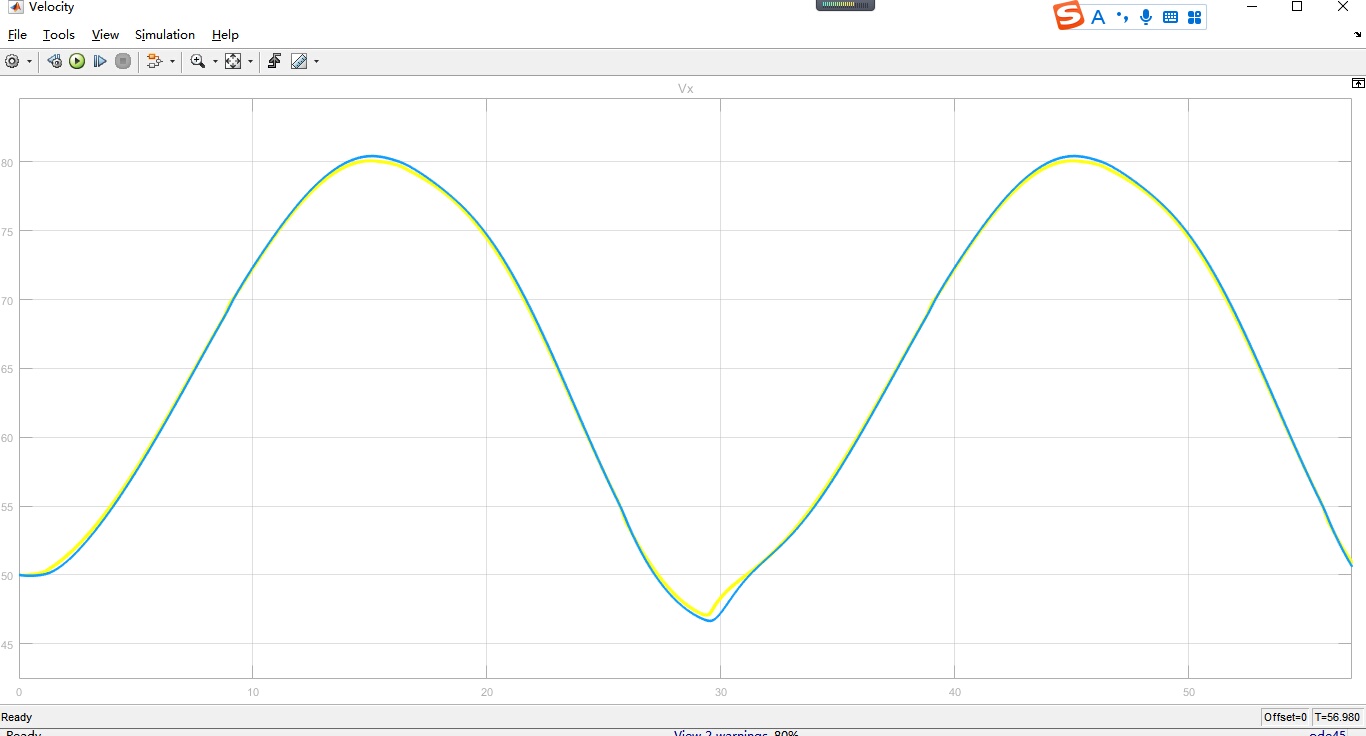
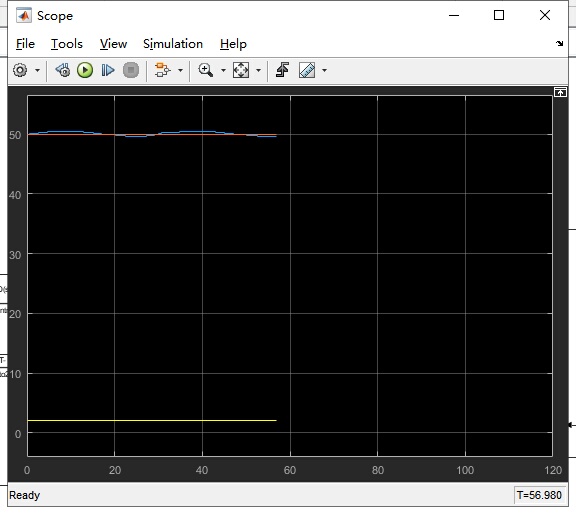
五、仿真结果与分析
通过Carsim和Simulink的联合仿真,我们得到了自适应巡航系统在两车仿真中的各项性能指标。具体而言,我们分析了纯电车的速度调整、与前车的距离维持、系统的响应时间等重要参数,并与传统的巡航控制方法进行了比较分析。
六、结论与展望
本文基于Carsim和Simulink联合仿真,探讨了自适应巡航系统在两车仿真中的应用。通过研究和分析,我们发现采用PID控制算法和ACC固定间距策略能够有效提高纯电车的行驶安全性和舒适性。然而,在此基础上仍存在一些问题和挑战,例如如何应对复杂路况以及如何考虑更多车辆的情况等。因此,未来的研究可以进一步深入探索这些方面,并寻求更加精确和智能的自适应巡航系统设计。
综上所述,本文围绕自适应巡航系统的Carsim和Simulink联合仿真展开,重点关注了两车仿真的场景。通过系统的研究和分析,我们对自适应巡航系统在纯电车上的应用进行了深入的探讨,并提出了基于PID控制和ACC固定间距策略的解决方案。同时,我们也指出了当前研究的局限性和未来的发展方向。希望本文能够为自适应巡航系统的研究与应用提供一定的借鉴和参考。
相关的代码,程序地址如下:http://wekup.cn/673554005978.html
















 349
349











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









