







 多传感器信息融合是提高导航系统精度的关键技术,通过卡尔曼滤波算法融合IMU、GPS、DVL等信息。在无人机、自动驾驶等领域广泛应用,如IMU+GPS组合导航,实现更准确的定位。
多传感器信息融合是提高导航系统精度的关键技术,通过卡尔曼滤波算法融合IMU、GPS、DVL等信息。在无人机、自动驾驶等领域广泛应用,如IMU+GPS组合导航,实现更准确的定位。
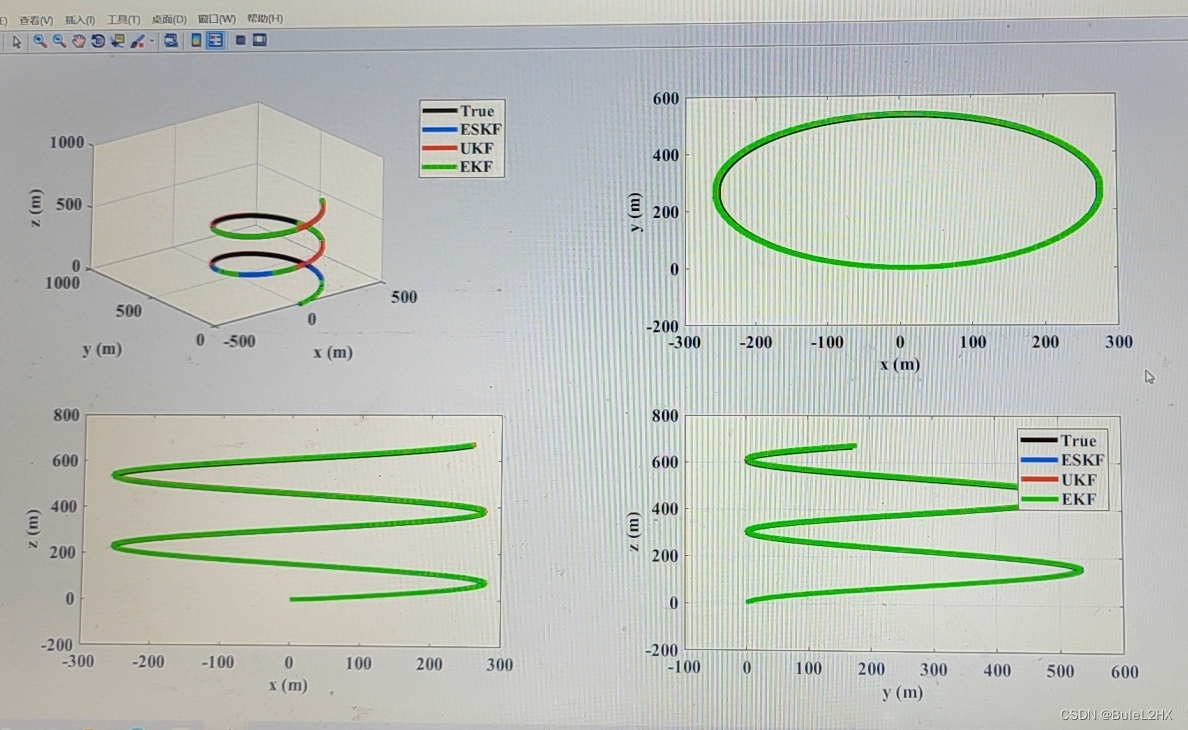
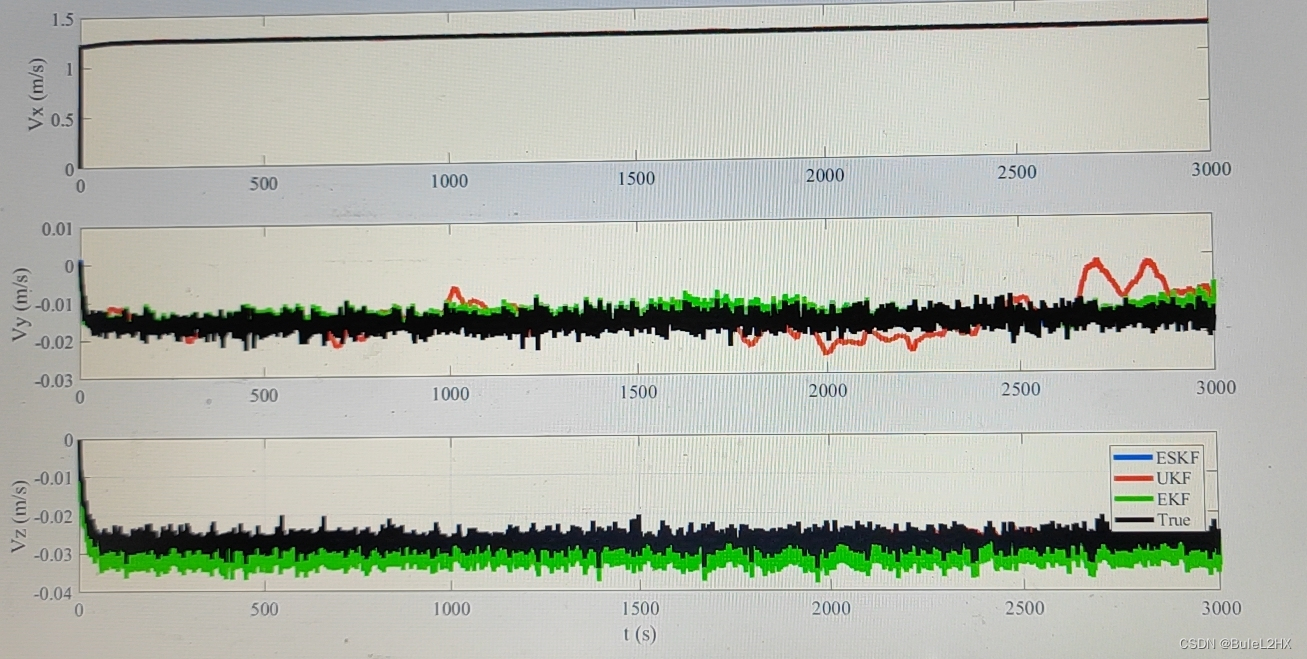
多传感器信息融合,介绍中图片为INS+ DVL组合程序,此外还有imu+ gps组合等其他程序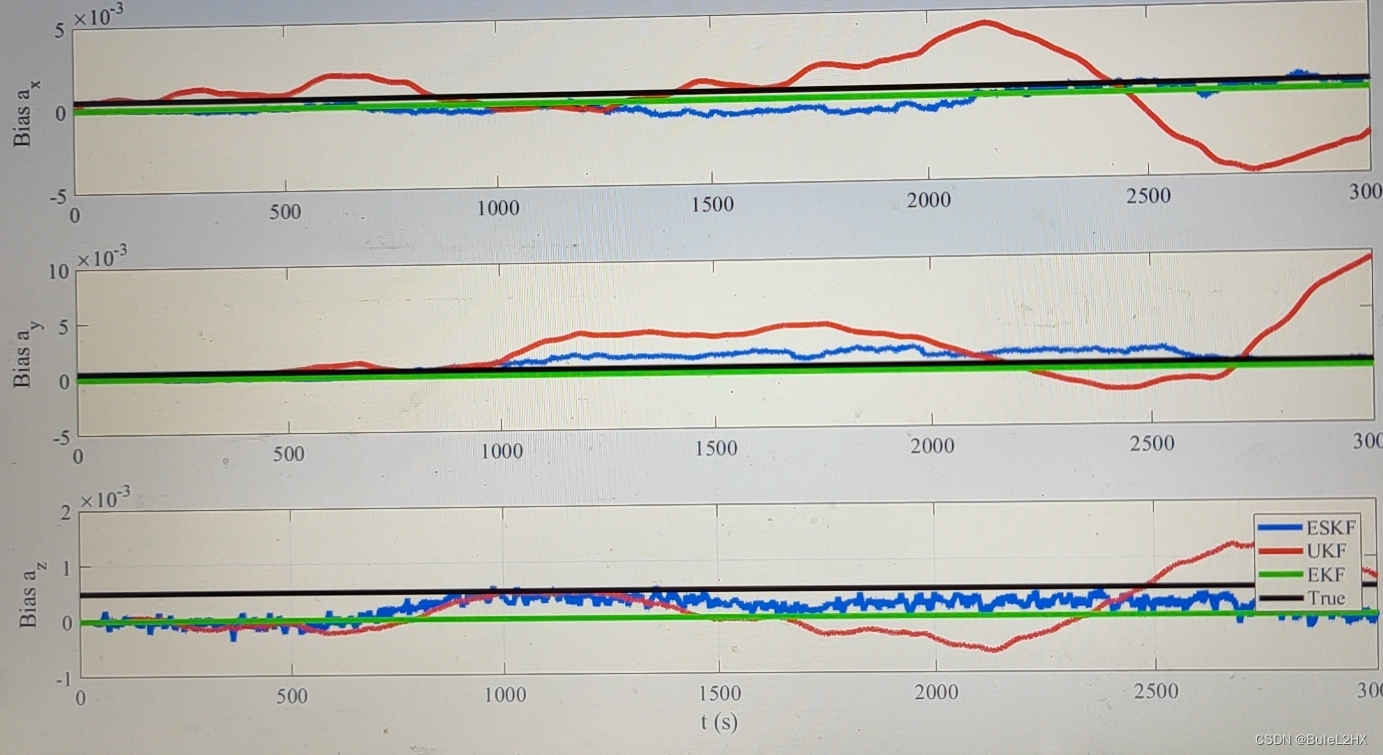
多传感器信息融合是现代导航系统中的重要技术之一。它通过将多个传感器的信息进行融合,可以提高导航系统的精度和可靠性。本文将介绍多传感器信息融合的技术原理、应用场景以及实现方法,同时给出一些实例代码以便读者更好地理解和掌握该技术。
一、多传感器信息融合的原理
多传感器信息融合的基本原理是将多个传感器的信息进行加权融合,以获得更准确的结果。在信息融合过程中,需要考虑传感器的精度、可靠性、误差等因素,以便对各个传感器的信息进行合理的加权和处理。
在多传感器信息融合中,通常使用卡尔曼滤波算法。卡尔曼滤波算法是一种基于概率统计的滤波算法,可以对多个传感器的信息进行最优估计和融合。该算法采用递归方式进行计算,可以实时更新系统的状态估计值,以便在接收到新的测量数据时及时更新导航结果。
二、多传感器信息融合的应用场景
多传感器信息融合技术广泛应用于各种导航系统中,例如无人机、无人车、自动驾驶等领域。在这些系统中,通常需要融合多种传感器的信息,例如
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 778
778

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









