






描述
上一篇文章混合A*算法详解(一)路径搜索
路径损失函数使用Voroni势能图
根据之前的文章分析,决定A*路径长度的有两点:路径长度和距离障碍物远近。Voroni图用于权衡这两者。之前我在记录二维点云的阿尔法形状算法时简单介绍过维诺图,链接在这里。
阿尔法形状算法与2D点云的C++实现
维诺图可以将每个障碍物作为一个多边形的中心。障碍物与障碍物之间,被等分的线段分割开,使得整个环境构成了一张维诺图。它有如下几个性质:
1.每个多边形中只有一个节点;
2.相邻多边形中的节点到达他们公共边的距离相等;
3.多边形内的点距离其中心,比距离其他多边形的中心都要近
论文在维诺图的基础上提出了维诺势能(Voroni Field)。它的公式如下:


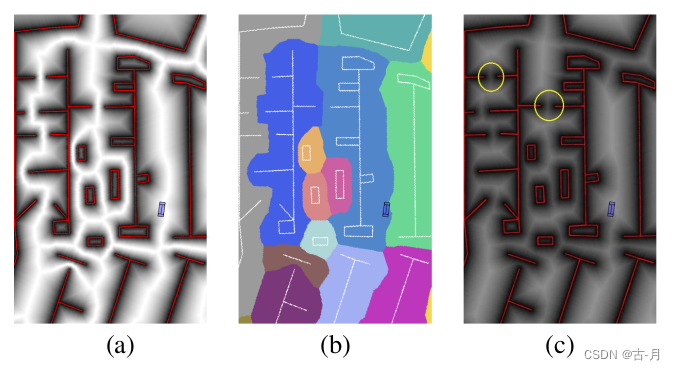

 Voronoi图和势场的使用早已在机器人运动规划的背景下提出。例如,Voronoi图可用于导出自由空间的骨架化(Choset和Burdick 2000)。然而,对于具有非完整约束的汽车来说,沿着Voronoi图导航是不可能的(由于运动学约束某些路径是车辆是无法驾驶通过的)。导航函数(Koditschek 1987;Rimon和Koditchek 1992)和拉普拉斯势(Connolly,Burns和Weiss 1990)也与我们的Voronoi域相似,因为它们构造了用于全局路径规划的不存在局部极小值的势函数。我们不使用Voronoi势能图进行全局路径规划。然而,我们观察到,对于具有凸障碍物的工作空间,Voronoi势能图可以用全局吸引势能来增强,产生一个没有局部极小值的势能图,因此适合于全局导航。我的理解是对于图a,可以看到凸障碍物内部的势能也比较高,该障碍物小还好说,当障碍物非常大时,应用Voroni势能可以避免在障碍物内部产生局部最小值的势能,导致规划多占用算力。
Voronoi图和势场的使用早已在机器人运动规划的背景下提出。例如,Voronoi图可用于导出自由空间的骨架化(Choset和Burdick 2000)。然而,对于具有非完整约束的汽车来说,沿着Voronoi图导航是不可能的(由于运动学约束某些路径是车辆是无法驾驶通过的)。导航函数(Koditschek 1987;Rimon和Koditchek 1992)和拉普拉斯势(Connolly,Burns和Weiss 1990)也与我们的Voronoi域相似,因为它们构造了用于全局路径规划的不存在局部极小值的势函数。我们不使用Voronoi势能图进行全局路径规划。然而,我们观察到,对于具有凸障碍物的工作空间,Voronoi势能图可以用全局吸引势能来增强,产生一个没有局部极小值的势能图,因此适合于全局导航。我的理解是对于图a,可以看到凸障碍物内部的势能也比较高,该障碍物小还好说,当障碍物非常大时,应用Voroni势能可以避免在障碍物内部产生局部最小值的势能,导致规划多占用算力。
点击 混合A*算法详解(二)路径平滑 - 古月居可查看全文















 794
794











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









