






几十套模型预测控制MPC相关matlab程序代码simulink+文档
1、基于Koopman模型预测控制的非线性流控制的数据驱动框架
2、一种用于非线性模型预测控制的并行优化工具包(NMPC)
3、基于运动学车辆模型的开放式驾驶MPC横向控制算法
4、移动机器人路径跟踪的设计与仿真模型预测控制
5、基于ACADO工具包的自主车道跟踪和避障车辆的模型预测控制
6、分层MPC控制器的实时车辆优控制和避障
7、利用随机有限集理论对蜂群的ILQR和MPC控制
8、具有飞行约束的无人机MPC
9、MPC在美国高速公路场景中移动的车辆上的实现
10、带挂载的四轴飞行器的MPC
11、基于MPC的仿真轨迹跟踪模块
12、非线性casadi模型预测控制
13、模型预测控制(MPC)基准测试问题的开放集合
14、轨迹优化和非线性模型预测控制(MPC)工具箱
15、过程控制代码,包括优化、模型预测控制(MPC)、移动视界、卡尔曼滤波器等
16、非线性弹簧质量系统的简单模型预测控制(MPC)
17、输出LC滤波器三相逆变器模型预测控制(MPC)仿真
18、低数据极限下模型预测控制的非线性动力学的稀疏识别
19、连续线性化模型的预测控制
20、MPC在美国高速公路场景中移动的车辆上的实现
21、四轮车辆轨迹规划
22、基于模型预测控制的车辆路径跟踪
23、基于MPC的永磁同步电机非线性终端滑模控制仿真研究
24、文档+程序 ee498风力发电机组模型预测控制应用项目。
对机器的定子侧进行电流控制。
dq框架用于简单性
25、文档+程序 基于模型预测控制的自动避障和汽车跟踪
26、文档+程序 多篇RMPC 鲁棒模型预测控制
27、文档+程序 USV的自动驾驶模型预测控制
28、文档+程序 动态四足机器人的自由模型预测控制
29、文档+程序 基于学习的模型预测控制
30、文档+程序 具有参考跟踪的模型预测控制(MPC)来模拟火箭在火星上的着陆
31、文档+程序 无人驾驶汽车模型预测控制
32、文档+程序 基于动态车辆模型的 Baidu Apollo lqr和mpc横向控制算法
33、文档+程序 读书笔记-无人驾驶车辆模型预测控制
34、文档+程序 基于在线优化的快速模型预测控制
35、文档+程序 避免车辆碰撞的网络模型预测控制的MATLAB仿真
36、文档+程序 具有输出LC滤波器的三相逆变器的前馈神经网络模型预测控制
价格说明
ID:4720682536204140
梳橙







基于Koopman模型预测控制的非线性流控制的数据驱动框架
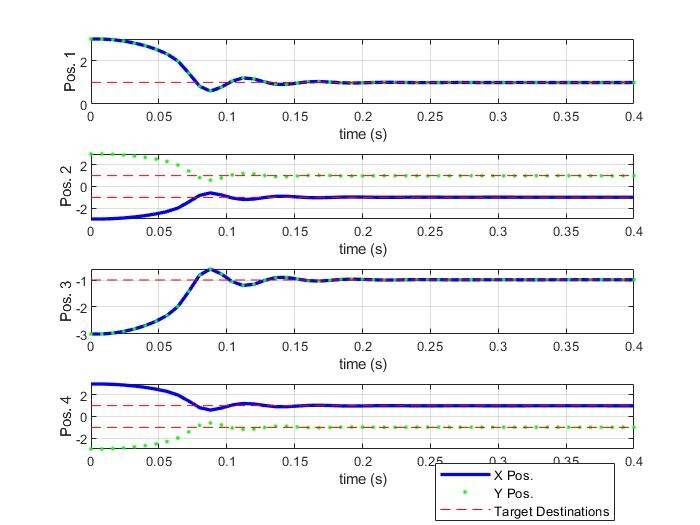
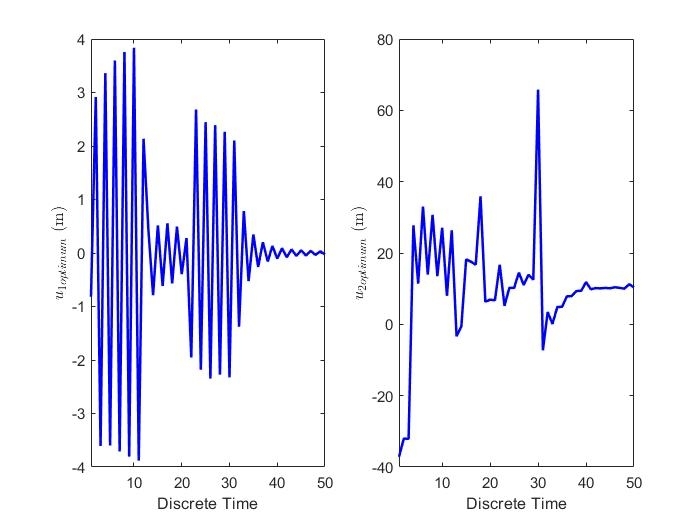
摘要:近年来,随着机器学习和数据驱动方法的发展,基于Koopman模型的预测控制方法在非线性流控制领域受到了广泛关注。本文介绍了一种基于Koopman模型预测控制的非线性流控制的数据驱动框架。该框架通过将非线性系统建模为高维特征空间中的线性系统,利用数据驱动的方法学习Koopman算子,实现了对非线性流控制的预测控制。实验结果表明,该框架能够有效地控制非线性系统的流动行为,实现精确的控制效果。
关键词:Koopman模型;预测控制;非线性流控制;数据驱动
-
引言
非线性系统的控制一直是控制理论研究的重要方向之一。传统的线性控制方法在处理非线性系统时存在着固有的局限性。近年来,随着机器学习和数据驱动方法的兴起,基于Koopman模型的预测控制方法在非线性流控制领域受到了广泛关注。Koopman算子是一种将非线性系统映射到线性空间中的操作,它能够有效地描述非线性系统的动力学行为。因此,利用Koopman模型进行预测控制成为了一种重要的方法。 -
方法
本文提出了一种基于Koopman模型预测控制的非线性流控制的数据驱动框架。首先,将非线性系统建模为高维特征空间中的线性系统,利用数据采集技术获取系统的状态数据。然后,通过对状态数据进行处理和分析,
【相关代码 程序地址】: http://nodep.cn/682536204140.html















 1610
1610











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









