






HAL库配置PWM,用于舵机和电机,炒鸡好用
1.hal配置
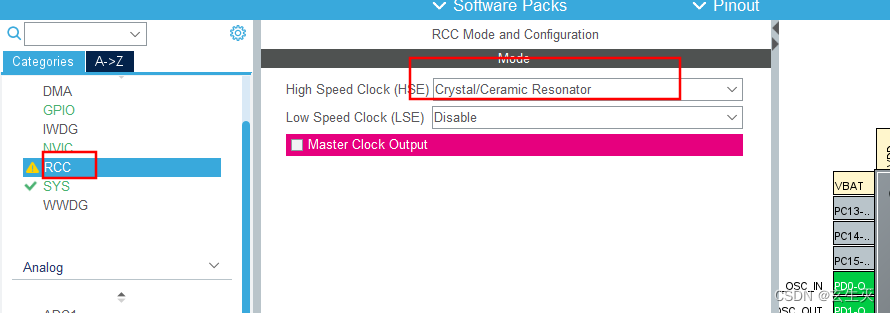
如下图所示,RCC时钟源使用外部晶振
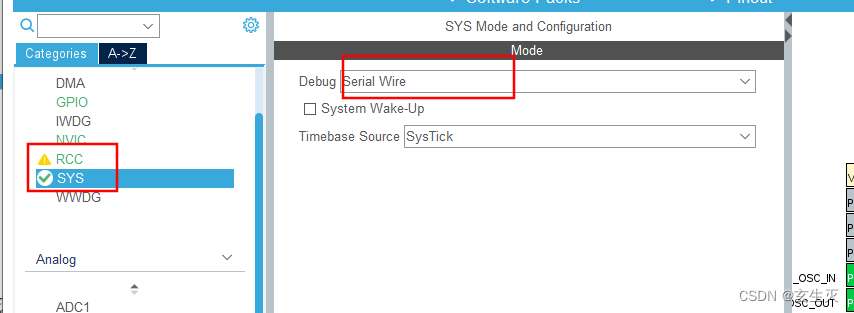
这里是配置SW下载
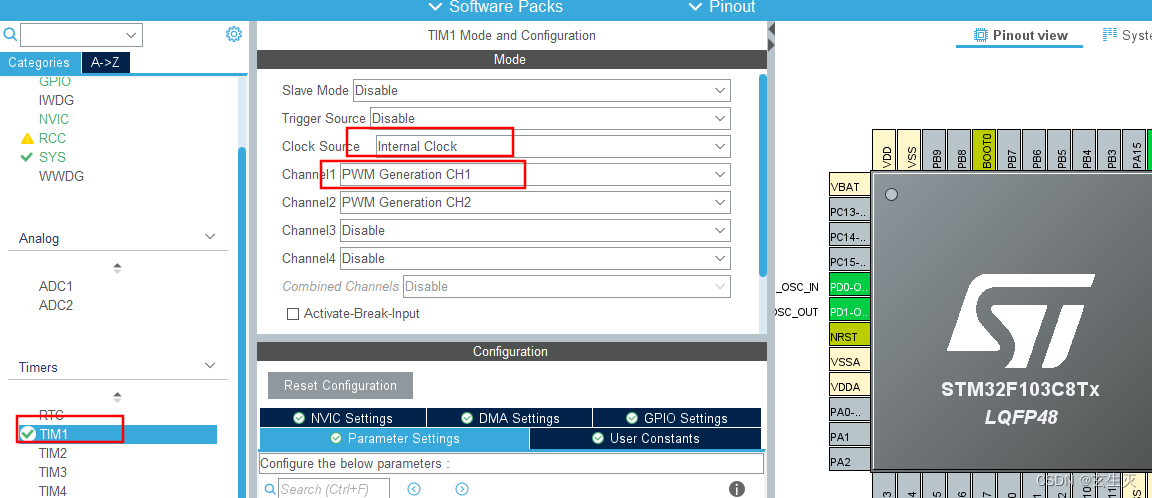
这里是使用了定时器TIM1,选择使用外部时钟和PWM的通道,如果想选两个通道也是可以的
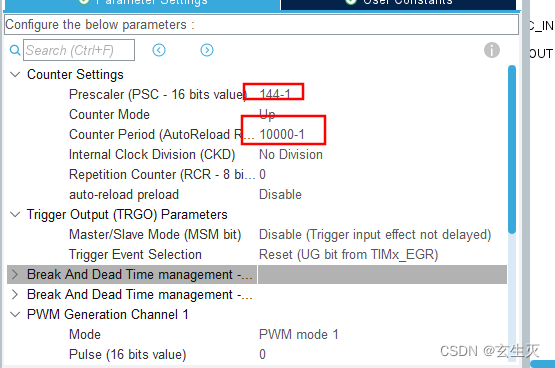
接下来是TIM的基础配置,比如ARR,CCR,PSC这些决定PWM参数的值,公式为
频率:
ω =Tclk(选择的时钟频率) / ((arr+1)*(psc+1)) (单位Hz)
占空比:
duty= ccr / arr (单位%)
在红色处修改PSC,ARR,笔者这里是使用STM32F103c8t6的板子,72MHZ,驱动舵机需要20ms即50HZ的周期,故修改参数如图
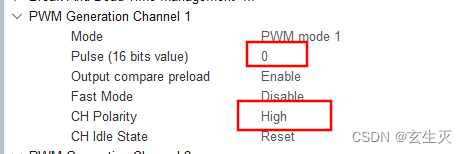
下图为修改CCR的值,如果有固定要求就修改,一般用函数修改,后文会提,然后通道极性就是选择高低电平时反转,不清楚的话就后面看实验现象修改,以及那个PWM模式1还是2,同理
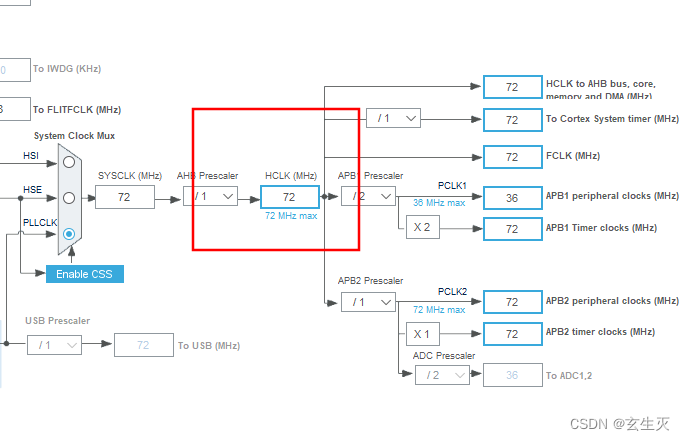
在时钟树这里没有要求就直接72回车
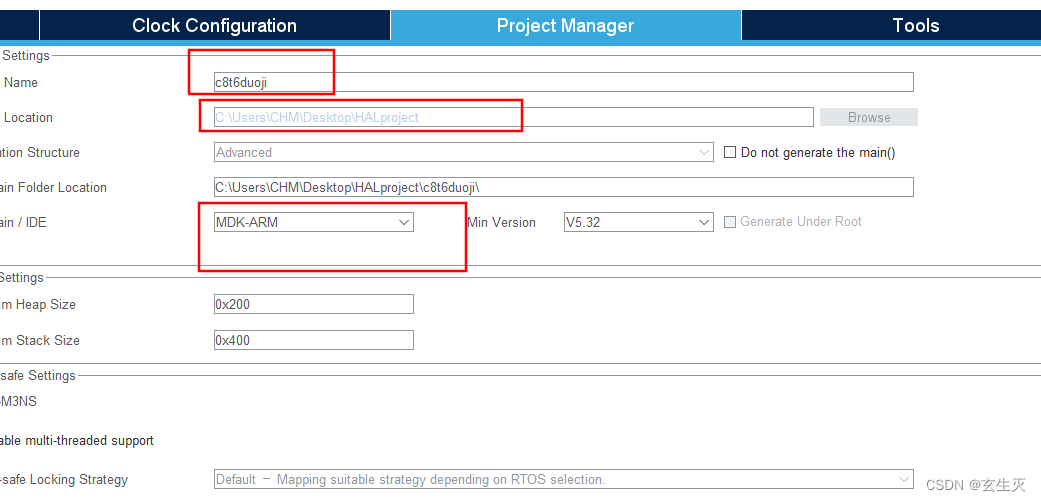
如下图修改文件名称,地址,主要不要出现中文,笔者也经常在这里犯错。
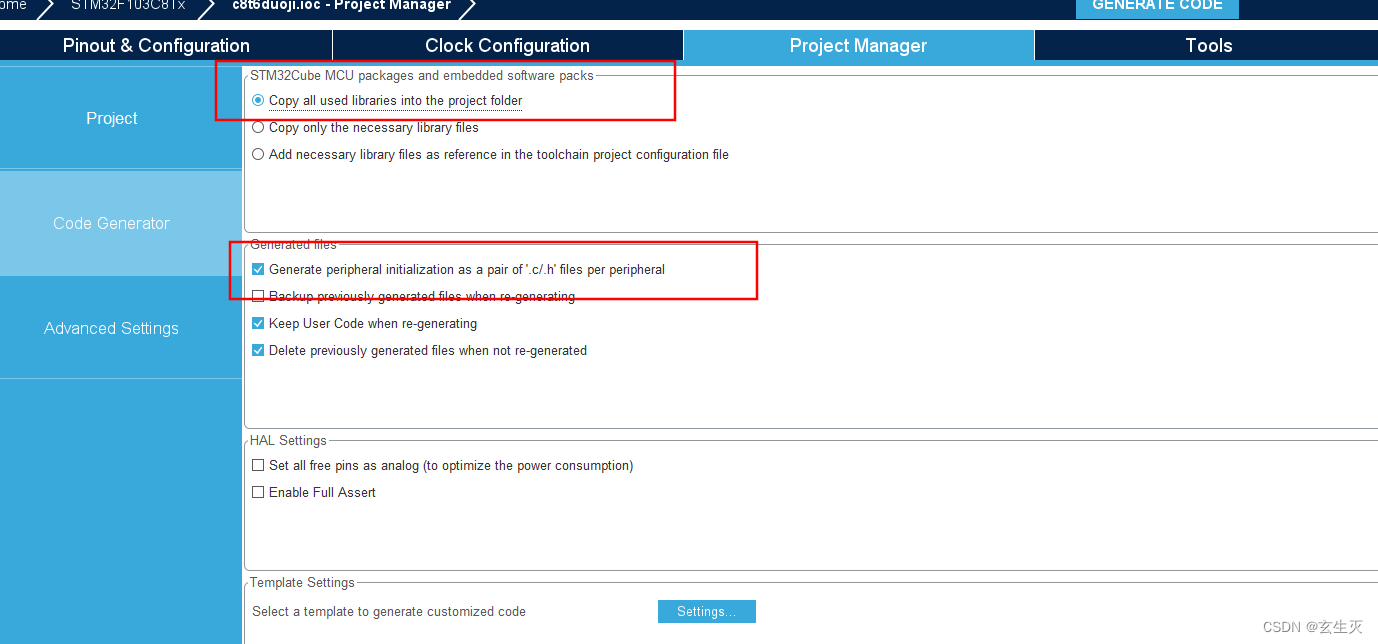
这里就这样配置,如下图,
结束,最后右上角直接一键生成,over!

2.MDK_Keil 配置
舵机.c文件
#include "duoji.h"
extern TIM_HandleTypeDef htim1;
// ARR为10000-1,PSC为144-1,舵机要求为50HZ
//在主程序中写 HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); //开启PWM通道1
void DuoJi_Angle(float angle)
{
CCR=angle*1000/180+250;//这里PSC和ARR和笔者不一样的话要修改,就是小学二年级数学知识,不再累述
//舵机所需要的高电平持续时间为0.5ms到2.5ms
//总时间为50HZ也就是20ms,所以占空比为2.5%-12.5%
//ARR这里为10000,所以ccr的范围是250-1250
//根据角度和ccr的线性关系0-180°与250-1250
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1, (int)CCR); //这里就是修改CCR的地方,
//笔者将这封装成函数方便使用
}
提醒一下这句话要有,不然有错误
extern TIM_HandleTypeDef htim1;//有几个通道写几个
舵机.h文件
#include "main.h"
#ifndef __DUOJI___H__
#define __DUOJI___H__
void DuoJi_Angle(float CCR);
#endif
将以上代码加入到keil
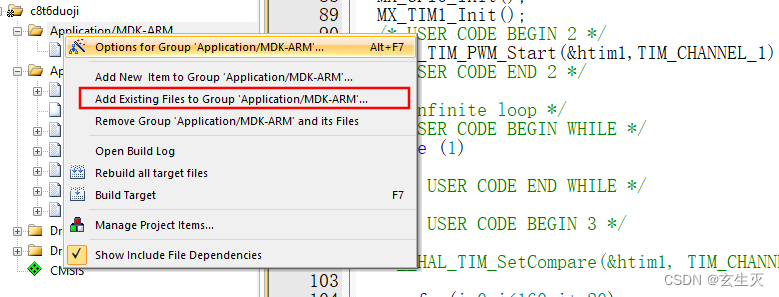
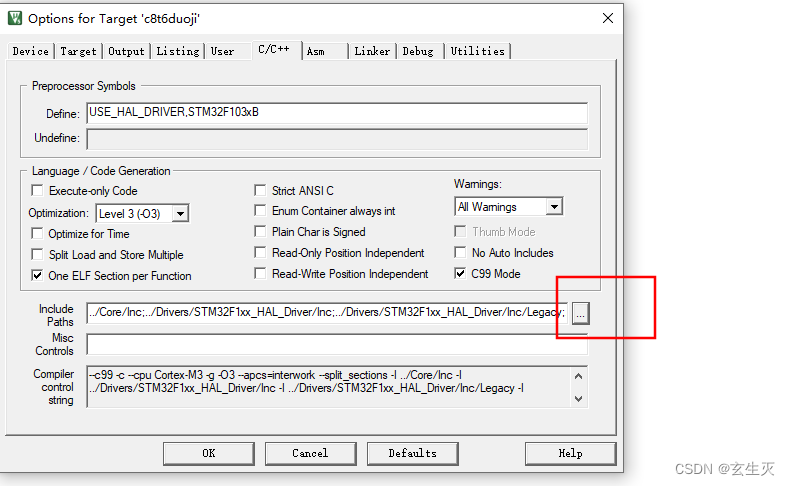
别忘了添加文件路径,不然编译会报错
主程序
接下来我们写主程序测试一下功能
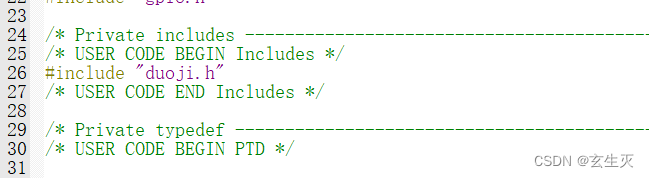
加入头文件
#include "duoji.h"
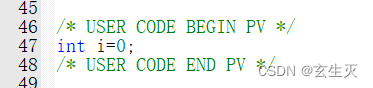
先定义一个变量
开启PWM通道,注意通道标号

在while循环中
for(i=0;i<160;i+=20)
{
DuoJi_Angle(i);
HAL_Delay(500);
if(i==160)
{
DuoJi_Angle(0);
HAL_Delay(500);
}
}
完成以上步骤就全部搞定了,快拿起示波器测试一下吧,测一下PWM引脚,看看是否有方波。友情提示,如果是直流电机的话,频率要在10KHZ。















 1475
1475











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









