







 本文介绍了YOLOv8在交通摄像头车辆检测中的改进,包括C2f模块的使用、小目标检测的难点处理、Loss函数的变化和训练结果分析。C2f模块增强了模型的轻量化性能,YOLOv8采用Anchor-Free方法并优化了匹配策略。
本文介绍了YOLOv8在交通摄像头车辆检测中的改进,包括C2f模块的使用、小目标检测的难点处理、Loss函数的变化和训练结果分析。C2f模块增强了模型的轻量化性能,YOLOv8采用Anchor-Free方法并优化了匹配策略。
🚀🚀🚀YOLOv8改进专栏:http://t.csdnimg.cn/hGhVK
学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研;
1.交通摄像头车辆检测数据集介绍
数据集来源:极市开发者平台-计算机视觉算法开发落地平台-极市科技
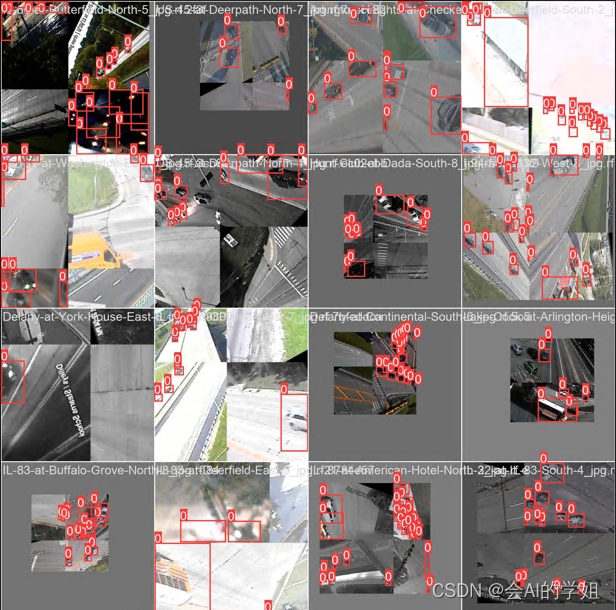
数据集类别“car",训练集验证集测试集分别5248,582,291张
下图可以看出都是车辆数据集具有不同尺寸的目标物体,既有大目标又有小目标
1.1 小目标检测难点
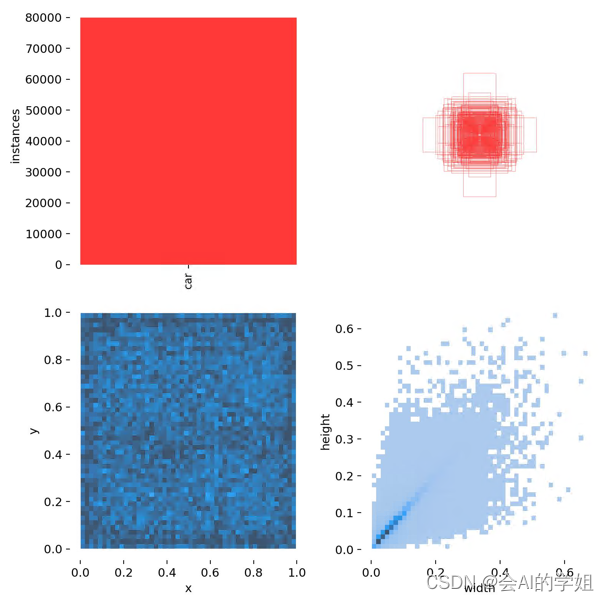
本文所指的小目标是指COCO中定义的像素面积小于32*32 pixels的物体。小目标检测的核心难点有三个:
- 由本身定义导致的rgb信息过少,因而包含的判别性特征特征过少。
- 数据集方面的不平衡。这主要针对COCO而言,COCO中只有51.82%的图片包含小物体,存在严重的图像级不平衡。具体的统计结果见下图。
2.YOLOv8介绍
改进点:
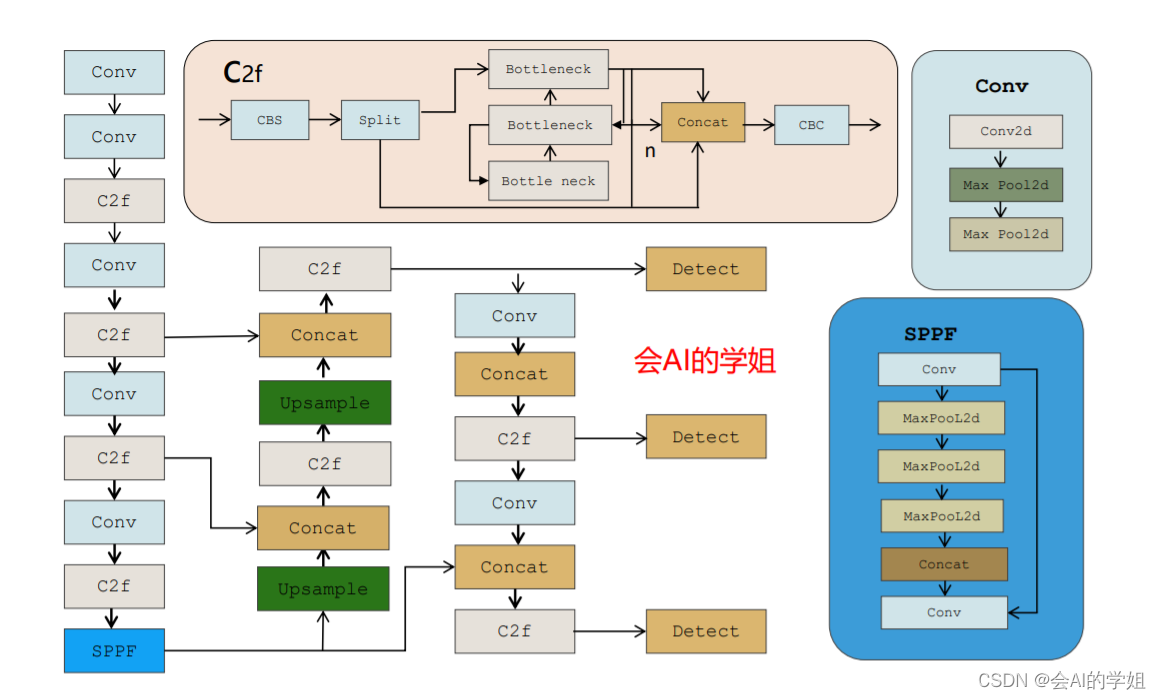
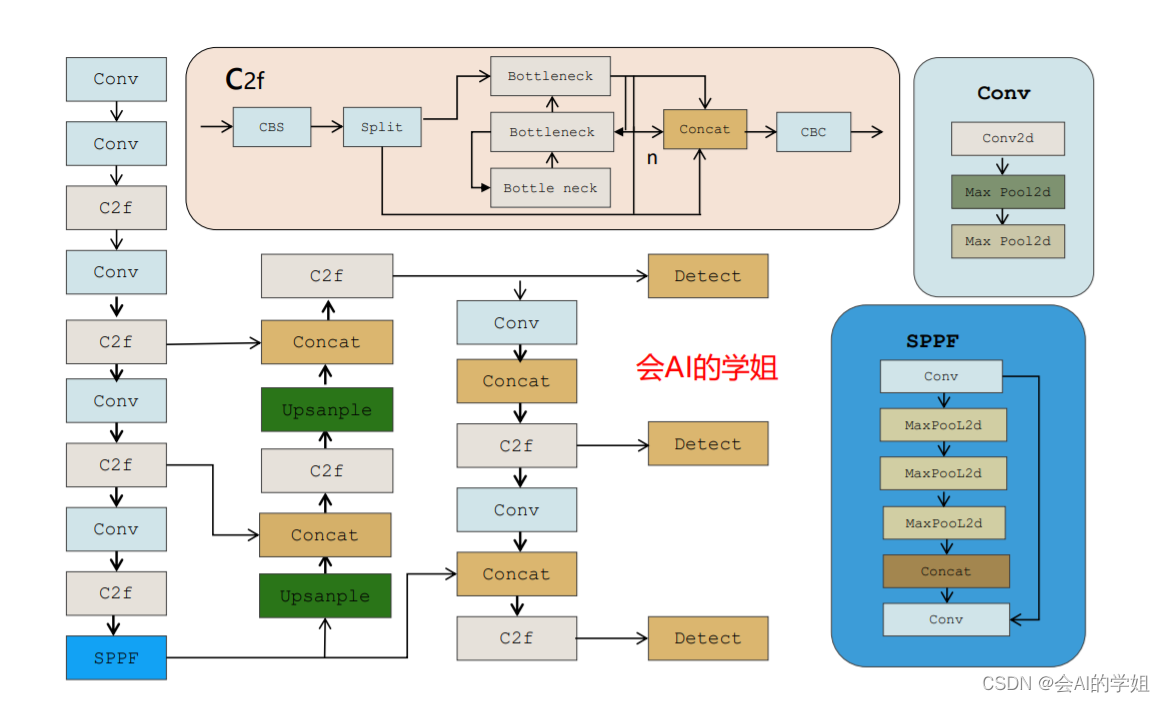
- Backbone:使用的依旧是CSP的思想,不过YOLOv5中的C3模块被替换成了C2f模块,实现了进一步的轻量化,同时YOLOv8依旧使用了YOLOv5等架构中使用的SPPF模块;
- PAN-FPN:毫无疑问YOLOv8依旧使用了PAN的思想,不过通过对比YOLOv5与YOLOv8的结构图可以看到,YOLOv8将YOLOv5中PAN-FPN上采样阶段中的卷积结构删除了,同时也将C3模块替换为了C2f模块;
- Decoupled-Head:是不是嗅到了不一样的味道?是的YOLOv8走向了Decoupled-Head;
- YOLOv8抛弃了以往的Anchor-Base,使用了Anchor-Free的思想;
- 损失函数:YOLOv8使用VFL Loss作为分类损失,使用DFL Loss+CIOU Loss作为分类损失;
- 样本匹配:YOLOv8抛弃了以往的IOU匹配或者单边比例的分配方式,而是使用了Task-Aligned Assigner匹配方式。
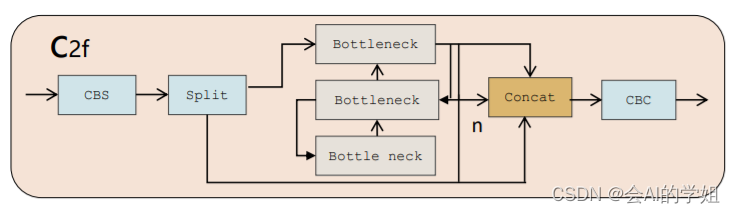
2.1 C2f模块介绍
C2f模块就是参考了C3模块以及ELAN的思想进行的设计,让YOLOv8可以在保证轻量化的同时获得更加丰富的梯度流信息。
代码:
class C2f(nn.Module):
# CSP Bottleneck with 2 convolutions
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))3.训练可视化分析
YOLOv8 summary (fused): 168 layers, 3005843 parameters, 0 gradients, 8.1 GFLOPs
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 10/10 [00:18<00:00, 1.90s/it]
all 582 6970 0.816 0.676 0.745 0.385训练结果如下:
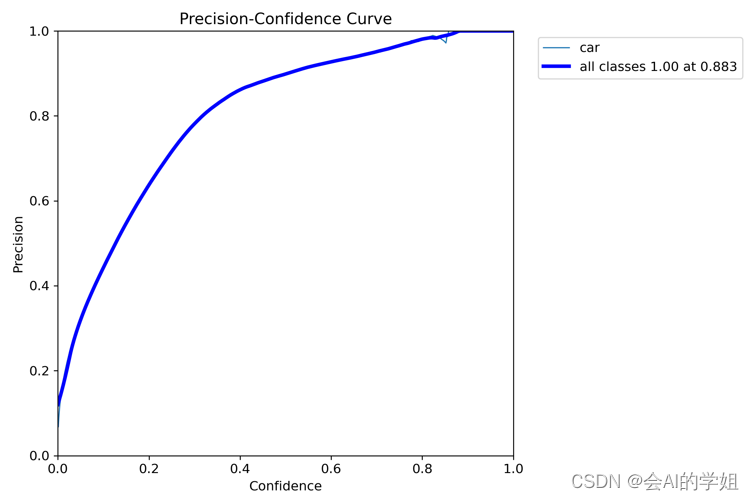
P_curve.png
表示准确率与置信度的关系图线,横坐标置信度。
由下图可以看出置信度越高,准确率越高。
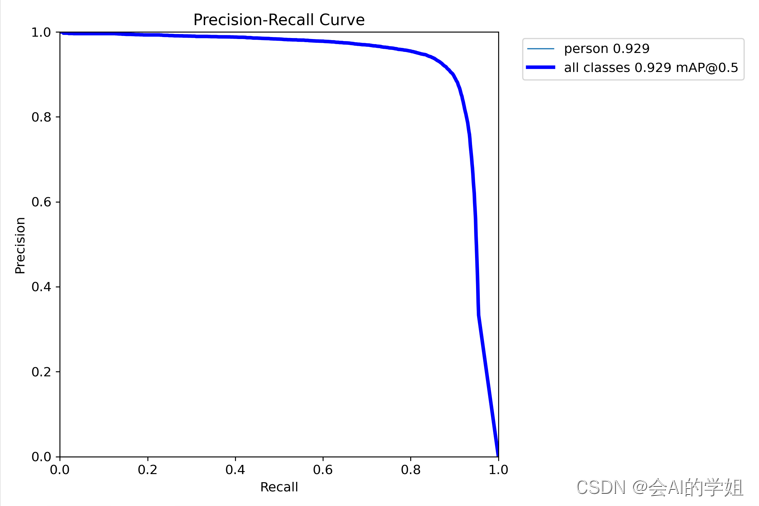
PR_curve.png
PR曲线中的P代表的是precision(精准率),R代表的是recall(召回率),其代表的是精准率与召回率的关系。
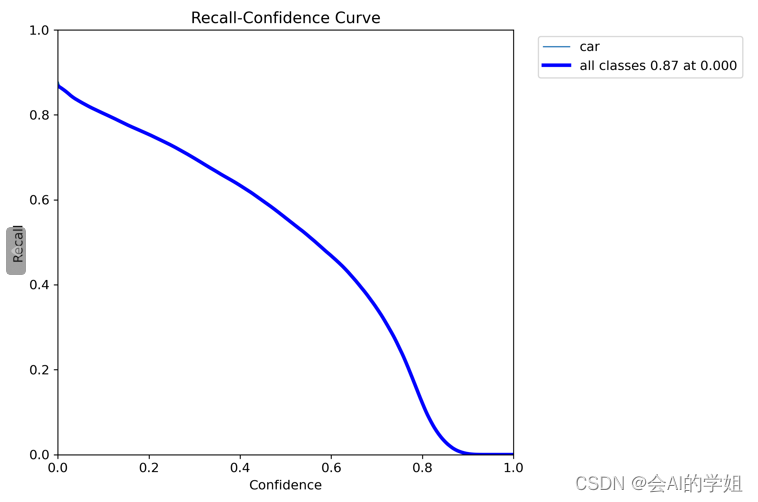
R_curve.png
召回率与置信度之间关系,具体参照 P_curve。
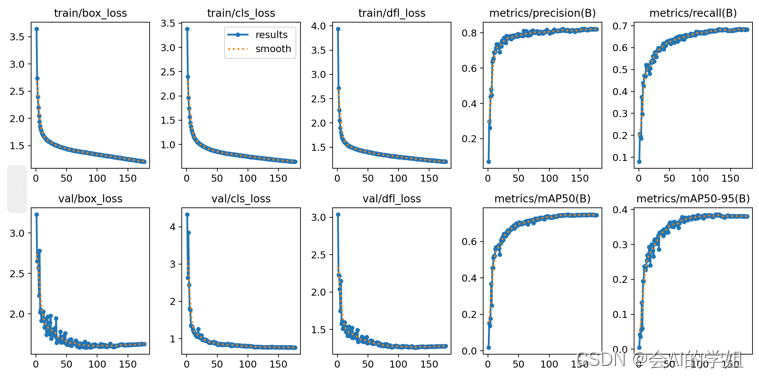
results.png
(1,1),(2,1):该图分别表示训练时和验证时ClOU损失函数的均值,越小方框越准。
(1,2),(2,2):推测为目标检测loss均值,越小目标越准。
(2,4),(2,5):表示在不同IoU阈值时计算每一类中所有图片的AP然后所有类别求取均值。
mAP_0.5:0.95表示从0.5到0.95以0.05的步长上的平均mAP.



















 1232
1232

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











