






作者 | 匡吉 编辑 | 深蓝AI
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【目标跟踪】技术交流群
01
概述
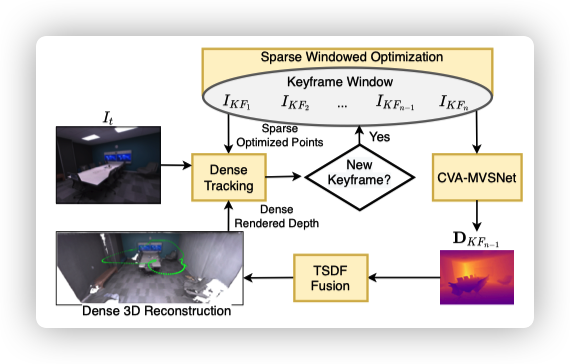
最近在研究TANDEM算法,是一个实时单目追踪和稠密建图的算法框架。TANDEM的算法框架可以概括为如下的几个部分:
1、位姿计算----在关键帧实施基于滑窗的像素级集束优化;
2、追踪前端----实施直接稠密图片配准,基于全局模型得到的深度图;
3、CVA-MVSNet----使用全部关键帧来预测稠密深度图;
4、全局地图----使用预测的深度图融合成全局地图,表示为TSDF体素表格。
TANDEM的整体架构图如下所示:
02
模块介绍
相关工作这里就不赘述了,主要涵盖了三维重建、RGB-D SLAM和单目SLAM三个方向的方法介绍和一般流程。这里,我们直接给出TANDEM算法框架中几个关键组件的介绍,也即是单目视觉里程计、使用CVA-MVSNet进行稠密深度估计和体素建图。
2.1单目视觉里程计
最近的一些方法,例如:DSO、ORB-SLAM,都是在多帧图像中使用一组稀疏点来追踪,最后计算出相机的位姿。虽然,使用更多的点来联合优化可以带来性能方面的优化,但是这回造成运行时间的显著提高。因此,在TANDEM中提出的视觉里程计,借鉴了DSO中所描述的----直接稀疏窗口优化后端。但是,TANDEM中还用了全局的TSDF模型来获取稠密深度图,这个深度图主要是用在前端的直接图像配准。
简单总结,TANDEM使用了稠密追踪前端和稀疏后端优化相结合的方式来提高追踪性能。
2.2稠密前端追踪
TANDEM前端的特点:
提供实时相机帧频的追踪
作为后端窗口优化的初始化输入
实现前端稠密点追踪(相较于DSO而言)
DSO的前端做法是,一张新的输入帧,基于过去n个关键帧来实施直接配准,而这n帧构建了一个稀疏深度图 ,这个深度图是由优化窗口中所有的点生成而来的。DSO的做法是得到一个稀疏深度图,所以鲁棒性较差。
TANDEM的做法是,构建一个稠密深度图---- ,来自于构建的TSDF模型。具体做法是,对于当前关键帧的每个像素,我们都给它们赋予一个深度值,这个深度值来自于DSO中稀疏VO点深度图,或者就是来自于稠密深度图。这样做的好处,就是相对而言,前端配准是,是稠密追踪实现的。
2.3CVA-MVSNet
首先,可以给出一个简单的分析,CVA-MVSNet就是一个输入是关键帧,输出是对应长宽的深度图(注意,这里输出是一维的),中间使用到具体的模型为U-Net和3DU-Net,这样一说的话,就很好理解这一块的架构。
那么,我们给出输入关键帧的定义---- ,这里 表示的是尺度为的图像,而 就是由前端的视觉里程计计算出来的全局位姿。
CVA-MVSNet的突出点----克服了深度MVS消耗大量内存的问题,简单来说,就是通过多级层次结构实现的,同时还使用了一个自适应的可视增强模块。具体的CVA-MVSNet的模型架构图如下所示:
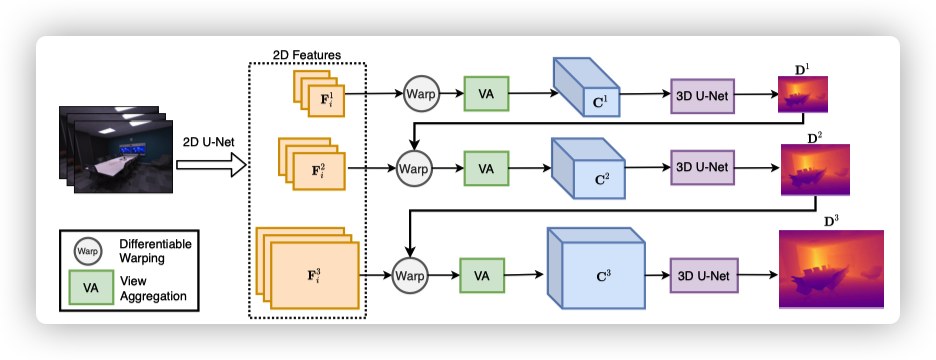
2.3.1单阶段深度计算
因为CVA-MVSNet使用了多阶段的方式来解决了内存损耗的问题,并且不同阶段之间大同小异,因此我们选取一个阶段进行详细分析,然后就可以熟知整个网络模型的作用和功能。
在分析之前,我们先给出模型输入和输出的一些变量的定义。
首先输入的原始图像就是我们获得关键帧的特征信息---- ,这里是从关键帧图像直接通过2D U-Net计算得到的特征信息,需要注意的是,特征信息的下标i表示特征信息的空间维度,而s的范围在1和3之间,表示的是尺度信息,这也体现了不同层次的论文思想。那么,我们可以用一个三维向量来表示 为 ,其中 表示为尺度因子为s的特征维度, ,。
接着就是,由 经过文中可微Warp操作,为3D U-Net提供输入数据----,具体的操作如下:
为参考帧的每个像素定义一个深度假设向量----;
对于每帧获得到的深度特征,通过可微的warp操作,这步操作同样使用到深度假设、相对位姿和相机内参;
经过上面两步操作,为每帧计算一个特征卷。
为了增强多视几何图特征卷,并最终得到,这一步又分为传统方法和本文的改进方法:
一般的MVS方法将不同的视图平等看待,然后使用基于差异的计算指标:,其中,,
本文中,基于滑窗SLAM的设置,关键帧在优化窗口中并不是均匀分布的,新关键帧一般要比旧关键帧的距离小,因此本文优化后的自适应视觉增强方法为:
 。
。
03
数据集和结果
1、训练集
本文训练了两个CVA-MVSNet的模型:一个使用实际的ScanNet数据集、另一个使用拟合数据集Replica数据集,一些结果如下图所示:
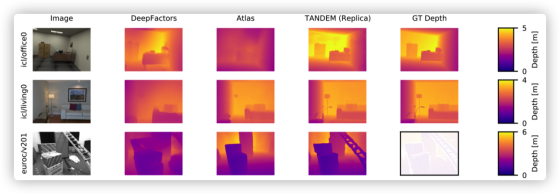
对于不可见的序列,本文的训练结果如下图所示:
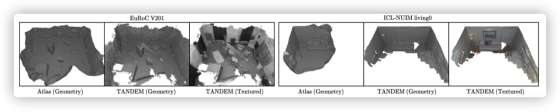
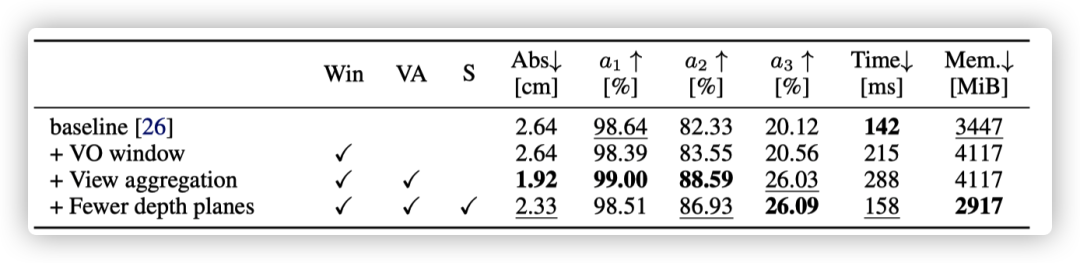
2、测试集
本文中使用了ICL-NUIM数据集和EuRoc数据集中的Vicon室内序列来评估稠密3D重建和追踪的结果。具体的一些结果如下:

04
结论
TANDEM是一个实时稠密单目SLAM系统,使用了直接像素里程计和多视图几何。尤其提出了CVA-MVSNet使用整个关键帧窗口,预测高质量的深度图;然后提出稠密追踪模式连接相机位姿估计和稠密3D重建,针对于TSDF融合创建的全局3D模型。结果表明,TANDEM获得更好的性能。

【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









