






作者 | 自动驾驶之心
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
相机标定任务是很多高级功能的上游,无论是深度学习方案或是传统方案都非常依赖相机标定精度,今天就为大家盘点下相机内参标定常用的工具箱。
更多标定内容,欢迎学习:面向工程和量产级的相机标定实战教程!
1)OpenCV标定工具箱
opencv这个不用多说了,支持多种相机模型标定(pinhole、Kannala Brandt、Mei)
链接:https://docs.opencv.org/4.x/dc/dbb/tutorial_py_calibration.html
2)事件相机内参、标定工具 E-Calib
一种快速、稳健、准确的事件相机机校准工具
链接:https://github.com/mohammedsalah98/E_Calib

3)OcamCalib(Ocam模型)
链接:https://sites.google.com/site/scarabotix/ocamcalib-omnidirectional-camera-calibration-toolbox-for-matlab
4)Kalibr
支持pinhole、FOV、等距模型、双球模型、Extended Unified等标定!
Kalibr是一个解决以下标定问题的工具箱:
多摄像机标定:具有非全局共享重叠视场的摄像机系统的内参和外参校准,支持各种相机模型;
视觉惯性标定(CAM-IMU):相机系统IMU的空间和时间校准以及IMU固有参数标定;
多惯性标定(IMU-IMU):IMU相对于基本惯性传感器的空间和时间校准以及IMU固有参数;
Rolling Shutter Camera 标定:完整内参标定;

链接:https://github.com/ethz-asl/kalibr
5)ROS camera calibration
自动提示靶标摆放位置,camera_calibration将与满足标准ROS相机接口的任何相机驱动程序节点一起工作!支持pinhole、fisheye等相机标定!
链接:http://wiki.ros.org/camera_calibration

6)CameraCalibration
支持pinhole、Kannala Brandt,集合了相机标定相关的多个脚本工具,便于完成完整的车载环视相机标定流程 各代码文件均可单独使用,此外也提供了外部接口以供调用!
链接:https://github.com/dyfcalid/CameraCalibration

7)Basalt
Basalt支持相机、IMU和运动捕捉校准,视觉惯性里程计和测绘,模拟环境,用于测试系统的不同组件!
链接:https://github.com/VladyslavUsenko/basalt-mirror?tab=readme-ov-file

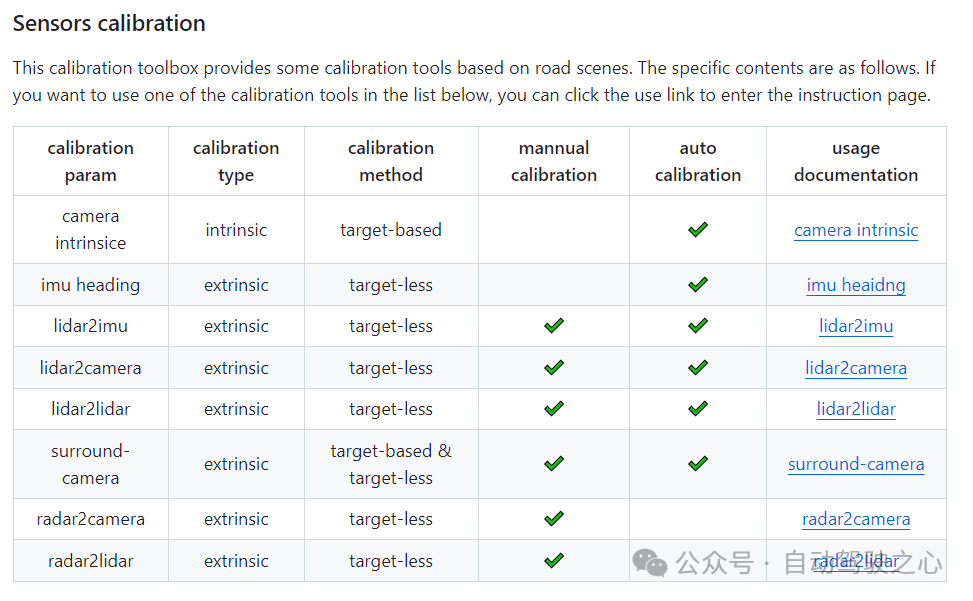
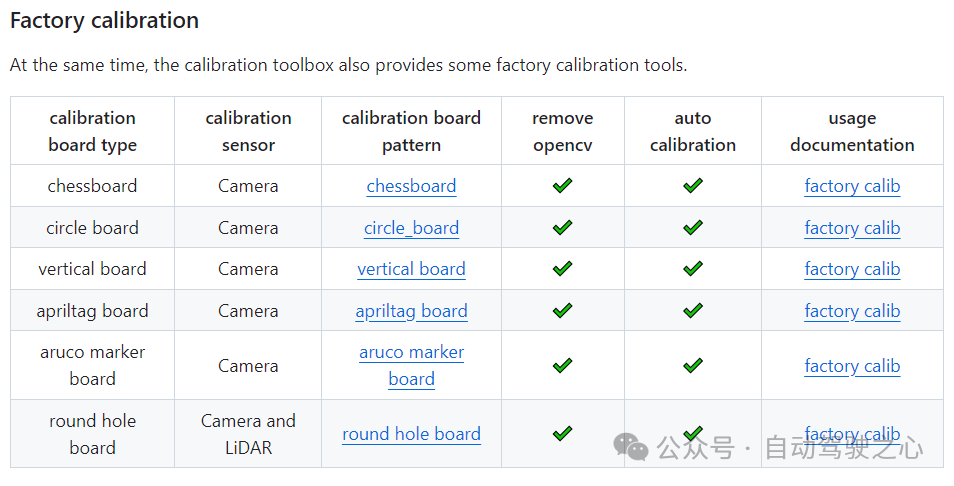
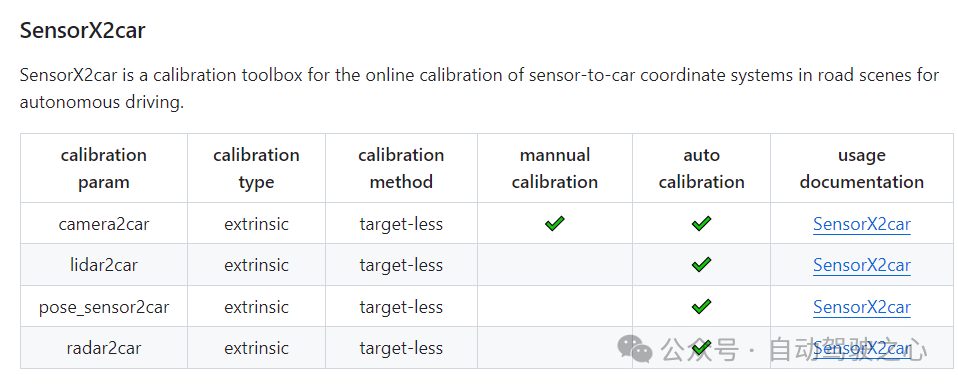
8)OpenCalib
OpenCalib工具箱可用于校准IMU、激光雷达、相机和雷达等传感器。
链接:https://github.com/PJLab-ADG/SensorsCalibration/tree/master
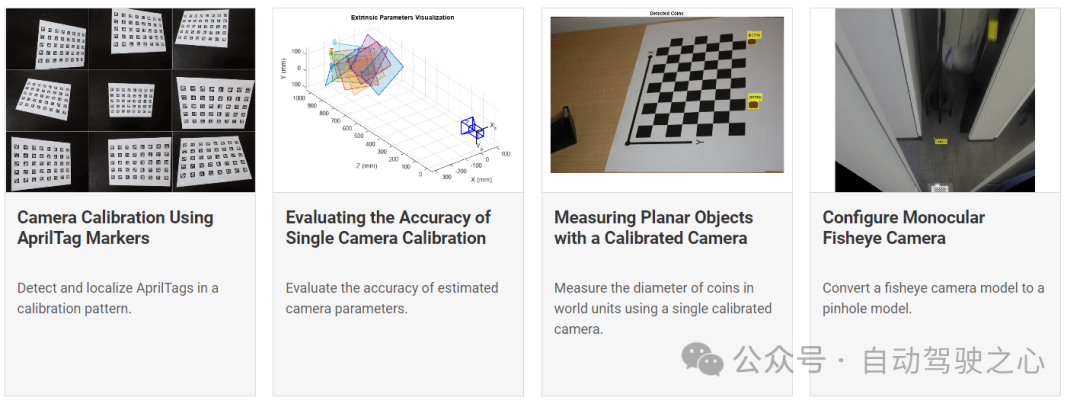
9)Matlab自带内参标定
Matlab自带的工具箱,校准单相机或立体相机,并使用针孔和鱼眼摄像头模型估计相机的内部、外部和失真参数!
链接:https://www.mathworks.com/help/vision/camera-calibration.html
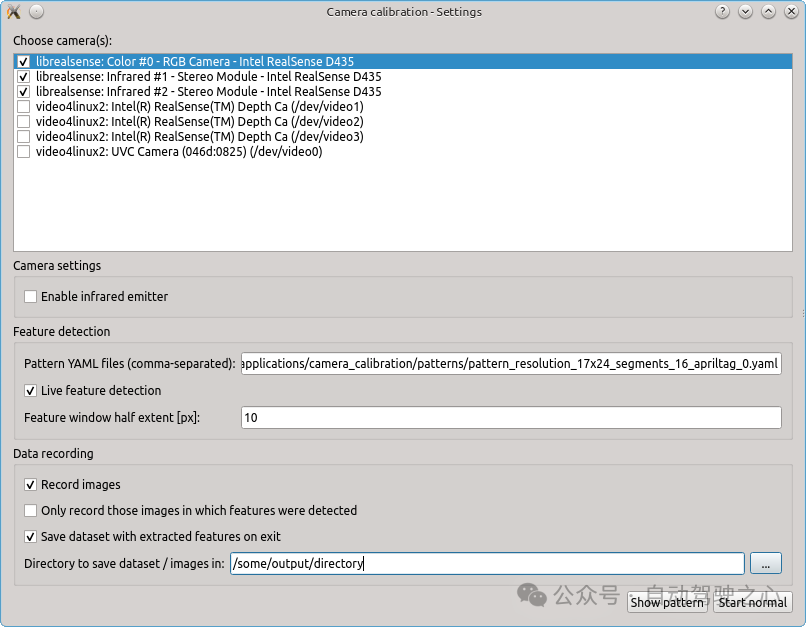
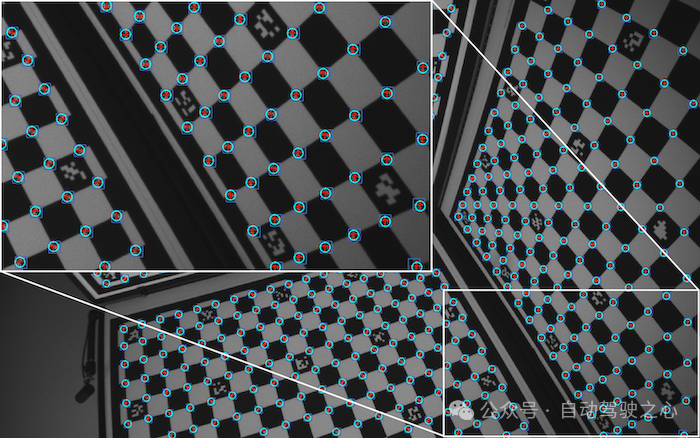
10)通用相机模型
可标任意相机、镜头, repo包含一个用于精确几何相机校准的工具,它支持通用相机型号的校准,几乎适用于所有相机,并允许高度准确的校准。该工具还支持校准固定摄像设备,此外还支持为Intel D435或Occipital Structure Core等立体相机估计准确的深度图像。
链接:https://github.com/puzzlepaint/camera_calibration
11)BabelCalib
论文链接:BabelCalib: A Universal Approach to Calibrating Central Cameras,支持任意中心投影相机模型。BabelCalib是一个校准框架,可以估计所有类型的中央投影相机的相机模型,校准功能强大且完全自动。BabelCalib提供具有附加失真的针孔相机模型,以及全方位相机和折反射装置。支持的摄影机模型列在解算器目录下,BabelCalib支持由一组校准板组成的校准目标,即多个平面目标。该方法与标定板上的图案类型无关。它对不准确定位的角点、外围检测和遮挡目标具有鲁棒性。
链接:https://github.com/ylochman/babelcalib
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

② 国内首个自动驾驶学习社区
国内最大最专业,近2700人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦2D/3D目标检测、语义分割、车道线检测、目标跟踪、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、在线地图、点云处理、端到端自动驾驶、SLAM与高精地图、深度估计、轨迹预测、NeRF、Gaussian Splatting、规划控制、模型部署落地、cuda加速、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!


















 4449
4449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









