







1 下载mujoco安装包
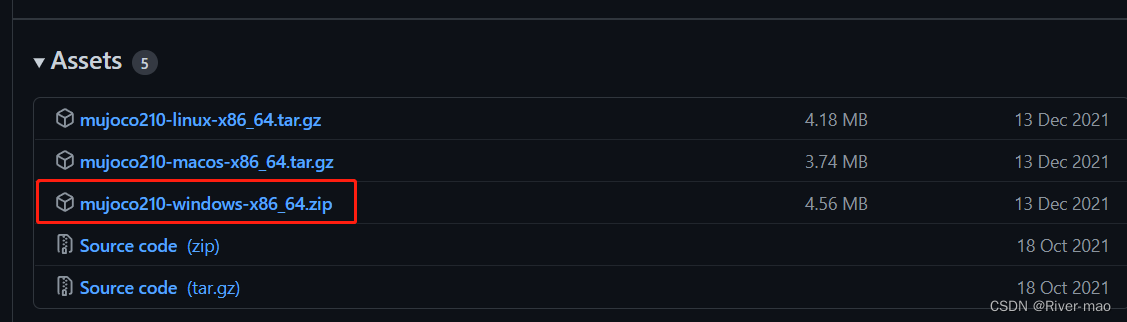
进入mujoco官方下载链接,选择mujoco210版本进行下载。这里选210的原因是后面用到的mujoco_py要求的版本是210,本人安装mujoco的时间是在:22年8月21日,后续可能会有所变化。
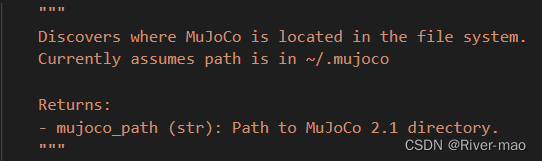
下图是我使用pip直接安装的mujoco_py中给出的提示,提到210版本的需求,我的环境的python版本为3.7。
同时在mujoco_py官方github中也有提到版本问题:
将下载的 .zip 文件解压到一个目录,这个目录非常重要,是后续添加环境变量时需要用到的,我使用的目录为:
D:/App/mujoco
mujoco目录下有mujoco210文件夹:
D:/App/mujoco/mujoco210
在mujoco210下还有如下文件和文件夹:

2 配置mujoco_py环境
创建python版本为3.7的conda环境:
conda create -n mujoco python=3.7
激活环境:
conda activate mujoco
直接安装mujoco_py:
pip install mujoco-py
至此该步完成
3 验证mujoco及mujoco-py
3.1 初次验证
为了验证mujoco以及mujoco-py,我选择ur5.xml模型进行验证,到https://github.com/roboticsleeds/mujoco-ur5-model链接中对项目进行下载,选择自己想要放置的目录解压(或直接使用git拉下来)。
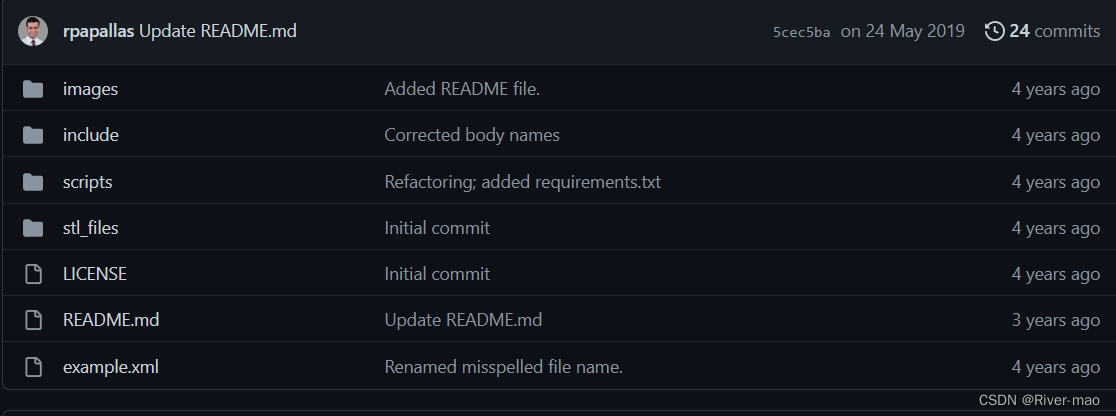
为了后续方便,我将整个目录重命名成了ur5, 并在与ur5同级下创建如下脚本:
import mujoco_py as mp
if __name__ == '__main__':
model = mp.load_model_from_path('ur5/example.xml')
sim = mp.MjSim(model)
viewer = mp.MjViewer(sim)
while 1:
viewer.render()
这时候我们尝试直接运行该脚本,结果肯定报错,因为我们还没有加相关的环境变量,错误如下所示:
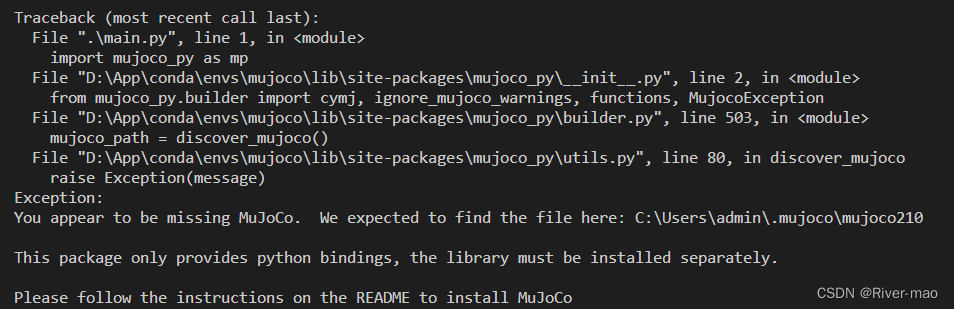
3.2 添加环境变量
大致意思是,需要从C:\Users\admin.mujoco\mujoco210中找文件,但是没找到,这就是因为我们还没有添加环境变量,因此我们需要将刚刚mujoco的路径添加到系统的环境变量中去。我们错误定位到utils.py的80行左右,有如下代码:
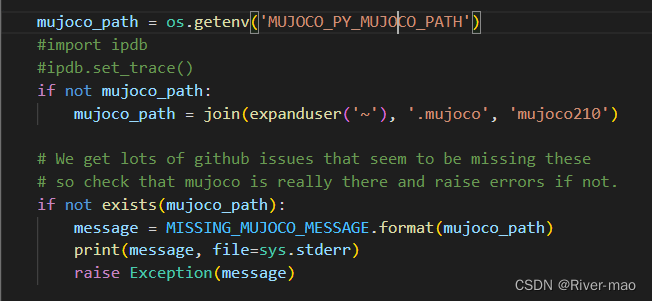
我们可以发现,需要添加环境变量的名称为:MUJOCO_PY_MUJOCO_PATH,那么变量名应该为我们上面解压得到的mujoco210的路径,我的路径为:
D:/App/mujoco/mujoco210
在电脑搜索中找到环境变量的设置界面,新建环境变量:
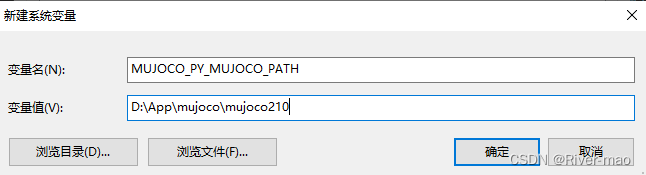
保存配置:
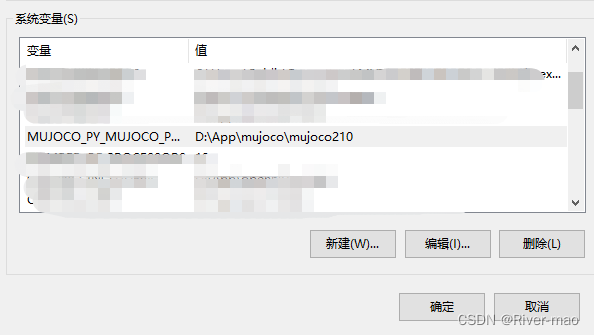
然后重启一下系统(我重启了一次才成功)。
3.3 安装所需C++环境
在次运行上述脚本,则上述错误消失,但又出现了新的错误,大致是所没有相关的C++的环境,那么我们就按照提示,到链接中下载工具,并安装(安装过程中大概需要下载5个G左右的文件的样子)。

安装完后,再次运行上述脚本,我们就可以得到如下界面:
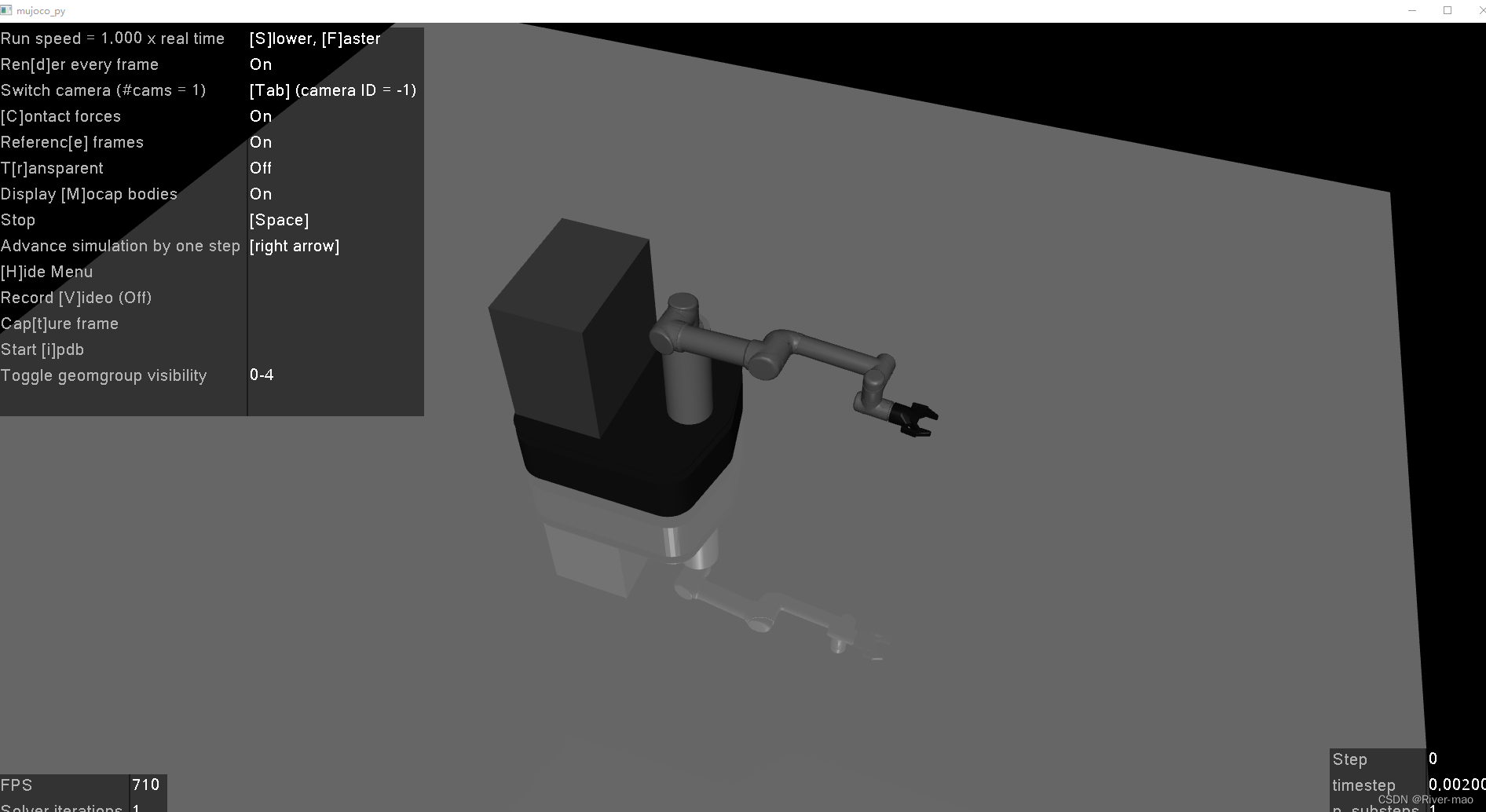
3.4 不出意外,应该成功了
到这里说明是安装成功了???应该是。
感觉WIndows装环境还是比较麻烦的,但是懒得换系统,就先装了一下试试。
想在mujoco上做力控的仿真,后续如果不懒的话,继续更新~














 869
869











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









