







1 场景定义
在日常的交通行驶中, 当行驶车辆由于自车原因突然失控、发生碰撞或者跌落(例如梅大高速坍塌事故)等异常状况时,自动拨打eCall的同时,也对外播发BSM异常事件-车辆突发紧急状况。这种情况下后方车辆收到前车异常事件后,会提醒人类驾驶员或传递给自动驾驶系统, 从而提前预判进行减速、 换道或者停车, 规避碰撞风险,保障行车安全。
上述功能称为“数字三角牌”。第一辆车辆异常后,相当于立即在一定范围内放置了虚拟的数字三角牌,在此范围内搭载C-V2X功能的车辆,都可以“看”到数字三角牌,从而及早采取措施,避免事故、拯救生命
2 适用范围
该场景适用于高速道路、城市道路、郊区等所有可行车区域。
3 场景功能点
车辆在行驶过程中,接收到周围一定范围内车辆发出的BSM事件消息( 车辆突发紧急状况)。若发现该异常车辆在行驶道路的前方(相同或相向道路上) , 则车端C-V2X协同应用系统则触发“ 前方车辆突发紧急情况”预警, 并在HMI显示出来。具体实施规则如下:
1)分析接收到的远车BSM事件消息;
2) 判断该异常车辆在行驶道路的前方(相同或相向)道路上,则计算该车辆到达异常车辆位置的TTC或距离CAR, 计算触发预警的时机;
3) 如果存在“ 融合感知和决策” 模块,则融合其他感知信息联合决策输出预警消息,否则就直接输出“ 前方车辆突发紧急状况” 预警消息在HMI显示。
4 基本性能要求
1) C-V2X OBU播发BSM消息频率为10 Hz, 信息传输平均时延在30 ms以
内,传输距离≥150 m;
2) 本车定位信息采集频率≥10 Hz, 偏差1.5 m之内占比95%以上;
3) 满足车车传输安全要求。
5 数据输入/输出
1) 数据输入:周围远车的位置和姿态信息(含车辆异常信息) 、高精度地图信息(可选)、 本车的车辆位置信息和姿态信息;
2) 数据输出: “前方车辆突发紧急情况” 预警。
6 功能模块设计
1)场景功能模块
前方车辆突发紧急状况场景的功能模块如图示。 其中:
✓ 输入系统:包括远车C-V2X OBU、 本车的组合定位系统以及底盘/
车身系统,用橙色模块标识;
✓ 车端C-V2X协同应用系统:包括C-V2X数据处理、融合感知和决策,
用绿色模块标识;
✓ 输出系统:即HMI,用黄色模块标识
1) 数据输入:周围远车的位置和姿态信息(含车辆异常信息) 、高精度地图信息(可选)、 本车的车辆位置信息和姿态信息;
2) 数据输出: “前方车辆突发紧急情况” 预警。
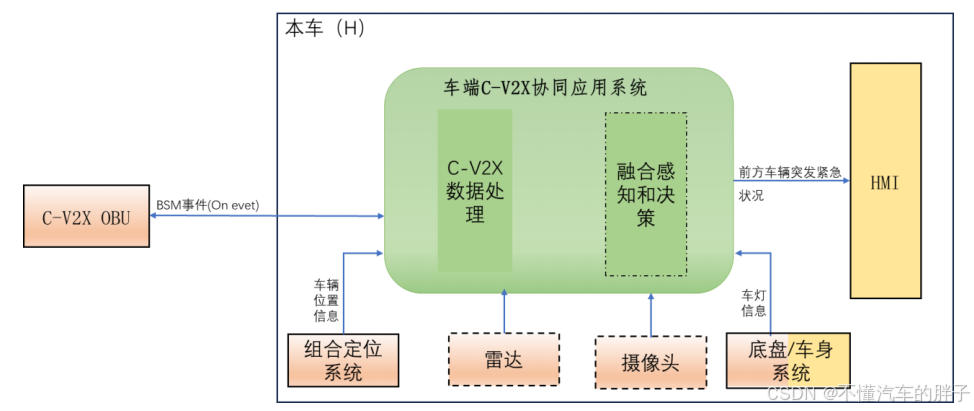
图 前方车辆突发紧急状况场景的功能模块图
7.系统间信息流程图
前方车辆突发紧急状况场景的系统间信息交互流程如图所示,主
要描述不同系统间的信息交互内容,以及车端C-V2X协同应用系统的处理流程。
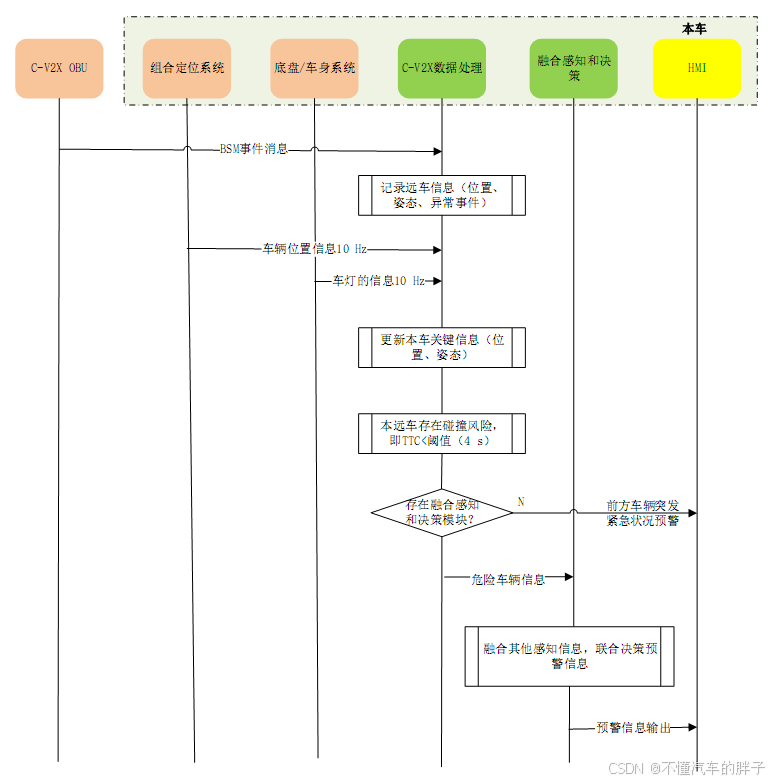
图 前方车辆突发紧急状况场景的系统间信息流图
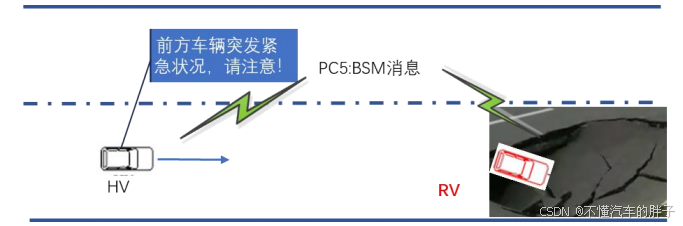
3)场景功能效果图
假设有一辆车( HV)沿车道行驶,突然收到前方车辆RV发出的 BSM事件消息-车辆突发紧急状况,车端C-V2X协同应用系统发出“前方车辆突发紧急状况” 提醒消息, 人类驾驶员收到提醒后及时减速或刹车,避免碰撞风险。 具体功能效果如图所示。
引用:陈山枝等,《车路云一体化系统C-V2X车车/车路协同典型应用场景及实施参考》,移动通信及车联网国家工程研究中心等, 2024年10月。



















 998
998

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











