







由IEEE组织,OPEN Aliance SIG组织, AVNU组织,AUTOSAR组织的共同发展与合作,进而规范了车载以太网符合OSI模型的整体架构如下图:
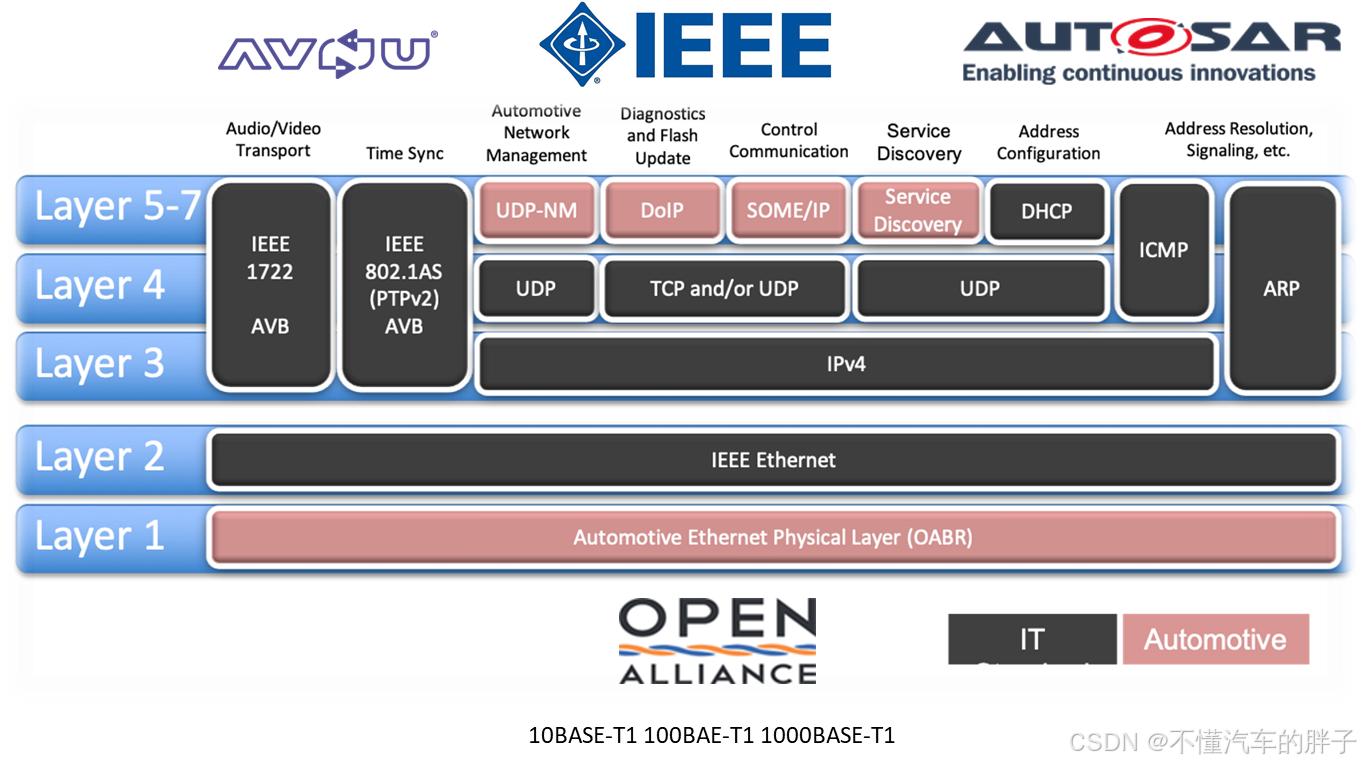
图 车载以太网OSI总体架构
AVNU: 致力于推进AVB/TSN时间敏感网络在汽车领域的应用,使以太网成为一种时间确定性的实时网络;
IEEE: 电气与电子工程师协会,其中802.3工作小组致力于推进以太网相关标准的制定与完善;
AUTOSAR: 汽车开放式系统架构组织,致力于实现汽车软硬之间解耦的标准同时也为车载以太网软件层级作出了相关规范说明;
OPEN Aliance SIG: 为非盈利性的汽车行业和技术联盟,旨在鼓励大规模使用以太网作为车联网标准;
标记为“IT”则为传统以太网技术协议规范,而标记为“Automotive”则为车载以太网技术协议规范。除了物理层、UDP-NM、DOIP、SOME/IP、SD这五个模块为车载以太网技术协议规范之外,其余均为传统以太网技术
车载以太网与传统以太网相比,车载以太网仅需要使用1对双绞线,且车载以太网并未指定特定的连接器,连接方式更为灵活小巧,能够大大减轻线束重量。除此以外,车载以太网物理层需满足车载环境下更为严格的EMC要求,对于非屏蔽双绞线的传输距离可达15m(屏蔽双绞线可达40m)。
虽然车载以太网只采用单对差分电压传输的双绞线,但是100M/s以太网可以通过回音消除技术来实现全双工通信。
当下主流的车载以太网协议主要为IEEE 100BASE-T1以及IEEE 1000BASE-T1,常规使用可采用100BASE-T1,如果需要更高带宽,可选择1000BASE-T1。
不过因为速率越高,对车载以太网物理层一致性测试就更为严格。
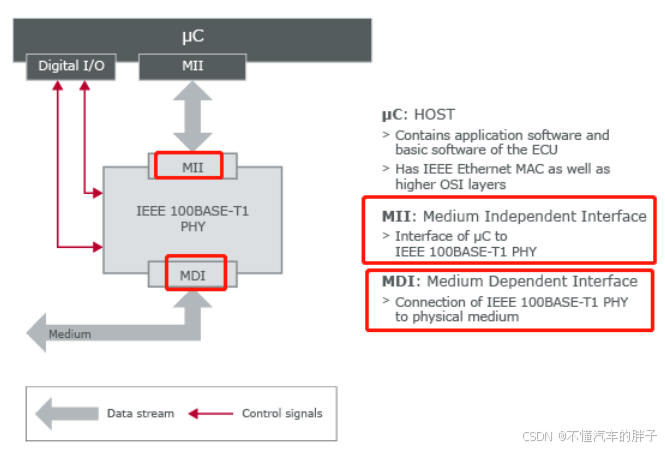
物理层
其中以太网所有物理层的功能全部集中在一个称为“PHY”的模块中,它将以太网控制器以及物理介质连接在一起,并且通过一个标准化接口MII连接,同时PHY模块与底层介质通过MDI接口连接,以100BSASE-T1所示,如下图所示:
数据链路层
可细分为LLC(Logic Link Control)以及MAC(Media Access Control)两个层级。此两层级定义与作用如下:
- LLC:负责向上层提供服务,管理数据链路通信,链接寻址定义等,与所用物理介质没有关系;
- MAC:负责数据帧的封装,总线访问方式,寻址方式以及差错控制等,MAC层的存在则可以使得上层软件与所用物理链路完全隔离,保证了MAC层的统一性;
网络层
网络层就是IP协议所在的层级,IP协议可以分为IPV4以及IPV6,常用的主要是IPV4,IP协议的主要作用就是基于IP地址转发分包数据。
- 同时IP也是一种分组交换协议,但是IP却不具备自动重发机制,即使数据没有达到目的地也不会进行重发,所以IP协议属于非可靠性协议。
- 车载以太网主要使用IPV4协议,同时由于该协议也属于传统以太网范畴
传输层
传输层的协议就是TCP/UDP,这两者协议彼此独立,也可以同时存在,看具体使用场景需求。TCP/UDP也是传统以太网的标准协议。不在详述
TCP协议特点
从上述的TCP建立连接以及断开连接的过程,不难得出TCP是一种面向连接可靠的传输层协议。具体总结有以下一些特点:
- 面向无连接,即不需要建立连接便可以直接进行通信;
- 存在单播,多播,广播的功能;
- UDP是面向报文的,UDP的报文报经过IP层不会进行任何拆分或重组;
- 不可靠性:由于没有像TCP的拥塞控制以及出错自动重传等机制,则会导致发送的报文无法保证接收方是否收到,因为网络本身就存在诸多的不确定性;
UDP协议特点
对比TCP协议,UDP具备以下一些特点:
- 面向无连接,即不需要建立连接便可以直接进行通信;
- 存在单播,多播,广播的功能;
- UDP是面向报文的,UDP的报文报经过IP层不会进行任何拆分或重组
- 不可靠性:由于没有像TCP的拥塞控制以及出错自动重传等机制,则会导致发送的报文无法保证接收方是否收到,因为网络本身就存在诸多的不确定性;
应用层
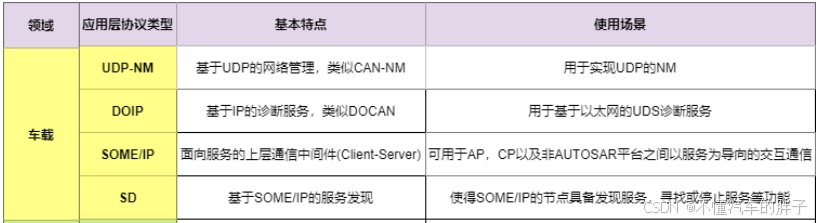
在车载以太网领域,目前主流涉及到的应用协议主要有UDP-NM,DOIP,Some/IP,SD以及传统以太网需配合支持的ICMP,ARP,DHCP等协议。



















 1714
1714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











