






JDY-18的使用
1.利用USE-TTL转换接口配置JDY-18
2.AT+NAME\r\n 查询蓝牙模块名称 (其实只要设置下名称就能使用了)

上图为配置完蓝牙之后的结果
我这边设置的蓝牙名称为:Jdy-1 蓝牙模式为从机模式
3.开启STM32 的USART3 串口
硬件连接方式
SMT32 蓝牙
PB.10 RX
PB.11 TX
GND GND
VCC VCC
USART3.H
USART3接收到的数据都存放入 USART3_RX_BUF
#ifndef USART3_H_
#define USART3_H_
#include "sys.h"
#include "stdio.h"
#define USART3_REC_LEN 200 //定义最大接收字节数 200
extern u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节
extern u16 USART3_RX_STA; //接收状态标记 0-14位为接收字节数,15位接收完成标志位
void usart3_init(u32 bound);
#endif
USART3.C
#include "sys.h"
#include "usart3.h"
u8 USART3_RX_BUF[USART3_REC_LEN]; //数组用来存储接收到的数据,而USART3_REC_LEN为最多能接收的字节限度
u16 USART3_RX_STA=0; //接收状态标记 0-14位为接收字节数,15位接收完成标志位
void usart3_init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructurea;
USART_InitTypeDef USART_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);//使能串口3
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能GPIOB
USART_DeInit(USART3);//串口3复位 不是必要的一步
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure); //PB10设置为复用推挽输出
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_11;
GPIO_Init(GPIOB,&GPIO_InitStructure); //PB11设置为浮空输入
NVIC_InitStructurea.NVIC_IRQChannel=USART3_IRQn;
NVIC_InitStructurea.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructurea.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructurea.NVIC_IRQChannelSubPriority=2;
NVIC_Init(&NVIC_InitStructurea); //串口3中断的设置
USART_ITConfig(USART3,USART_IT_RXNE,ENABLE);//串口3中断使能和中断类型设置
USART_InitStruct.USART_BaudRate=bound;//串口波特率
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStruct.USART_Mode=USART_Mode_Rx|USART_Mode_Rx;//收发模式
USART_InitStruct.USART_Parity=USART_Parity_No;//无奇偶校验位
USART_InitStruct.USART_StopBits=USART_StopBits_1;//一个停止位
USART_InitStruct.USART_WordLength=USART_WordLength_8b;//字长为8位数据格式
USART_Init(USART3,&USART_InitStruct); //串口3的一些参数设置
USART_Cmd(USART3,ENABLE);//串口3使能
}
void USART3_IRQHandler()//串口3的中断
{
u8 res;//暂时缓存接收的数据
if(USART_GetITStatus(USART3,USART_IT_RXNE)!=RESET)//判断是否为串口3接收中断
{
res=USART_ReceiveData(USART3);//接收到数据放进res
USART3_RX_BUF[USART3_RX_STA&0x7FFF]=res;//数据放进数组中,则可以用到main函数中了
USART3_RX_STA++; //字节长度++
if(USART3_RX_STA>(USART3_REC_LEN-1))USART3_RX_STA=0;//接收数据错误,重新开始接收 +;
USART3_RX_STA|=0x8000;//串口3接收完成
USART_ClearITPendingBit(USART3,USART_IT_RXNE);//清除接收中断标志
}
}
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "usart3.h"
#include "pwm.h"
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
LED_Init(); //初始化与LED连接的硬件接口
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//usart3接收中断优先级2 次优先级2
usart3_init(9600);//蓝牙的串口初始化 注意手机与单片机的蓝牙连接波特率是要9600
TIM3_PWM_Init(899,0);//不分频。PWM频率=72000/(899+1)=80Khz
while(1)
{
if(USART3_RX_STA&0x8000)
{
if(USART3_RX_BUF[0]=='0') //关闭所有灯光 反转灯光状态
{
key=!key;
LED=!LED;
LED2=!LED2;
LED3=!LED3;
TIM_SetCompare1(TIM3,0);
}
if(USART3_RX_BUF[0]=='1') //pwm 调光
{
TIM_SetCompare1(TIM3,50);
}
if(USART3_RX_BUF[0]=='2') //pwm 调光
{
TIM_SetCompare1(TIM3,150);
}
if(USART3_RX_BUF[0]=='3') //pwm 调光
{
TIM_SetCompare1(TIM3,350);
}
if(USART3_RX_BUF[0]=='4') //红灯
{
LED2=!LED2;
}
if(USART3_RX_BUF[0]=='5') //绿灯
{
LED=!LED;
}
if(USART3_RX_BUF[0]=='6') //蓝灯
{
LED3=!LED3;
}
USART3_RX_STA=0;
}
}
}STM32F103C8T6+PWM调光
开启TIM3 时钟,利用通道1------PA.6 进行PWM输出
下面主要附上LED 和PWM的代码
led.h
#ifndef __LED_H
#define __LED_H
#include "sys.h"
#define LED1 PAout(6)// PA6 PWM
#define LED PCout(13)// PC13 green
#define LED2 PCout(14)// PC14 red
#define LED3 PCout(15)// PC15 blue
#define key PBout(9)
void LED_Init(void);//初始化
#endif
led.c
#include "led.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOB, ENABLE); //使能PB,PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15; //LED0-->PC.13 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure); //根据设定参数初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_13); //PC.13 输出高
}pwm.h
#ifndef __PWM_H
#define __PWM_H
#include "sys.h"
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
PWM.C
#include "pwm.h"
#include "led.h"
#include "delay.h"
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
//TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //CH3预装载使能
TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源
LED1=!LED1;
}
}蓝牙APP
由于时间关系,此次采用了APP Inventor2进行APP开发(大家可以百度搜索APP Inventor2汉化版)
UI界面

组合逻辑界面
大家学习一下APP Inventor2的教程即可(30分钟完全就够了)
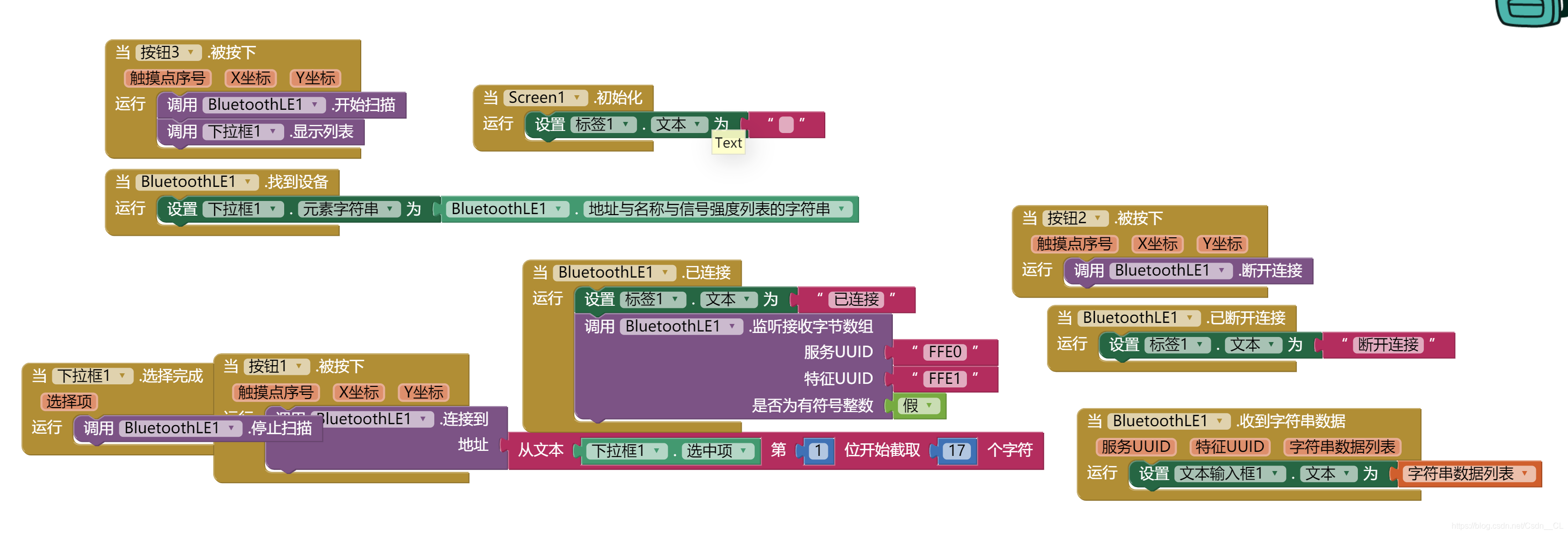
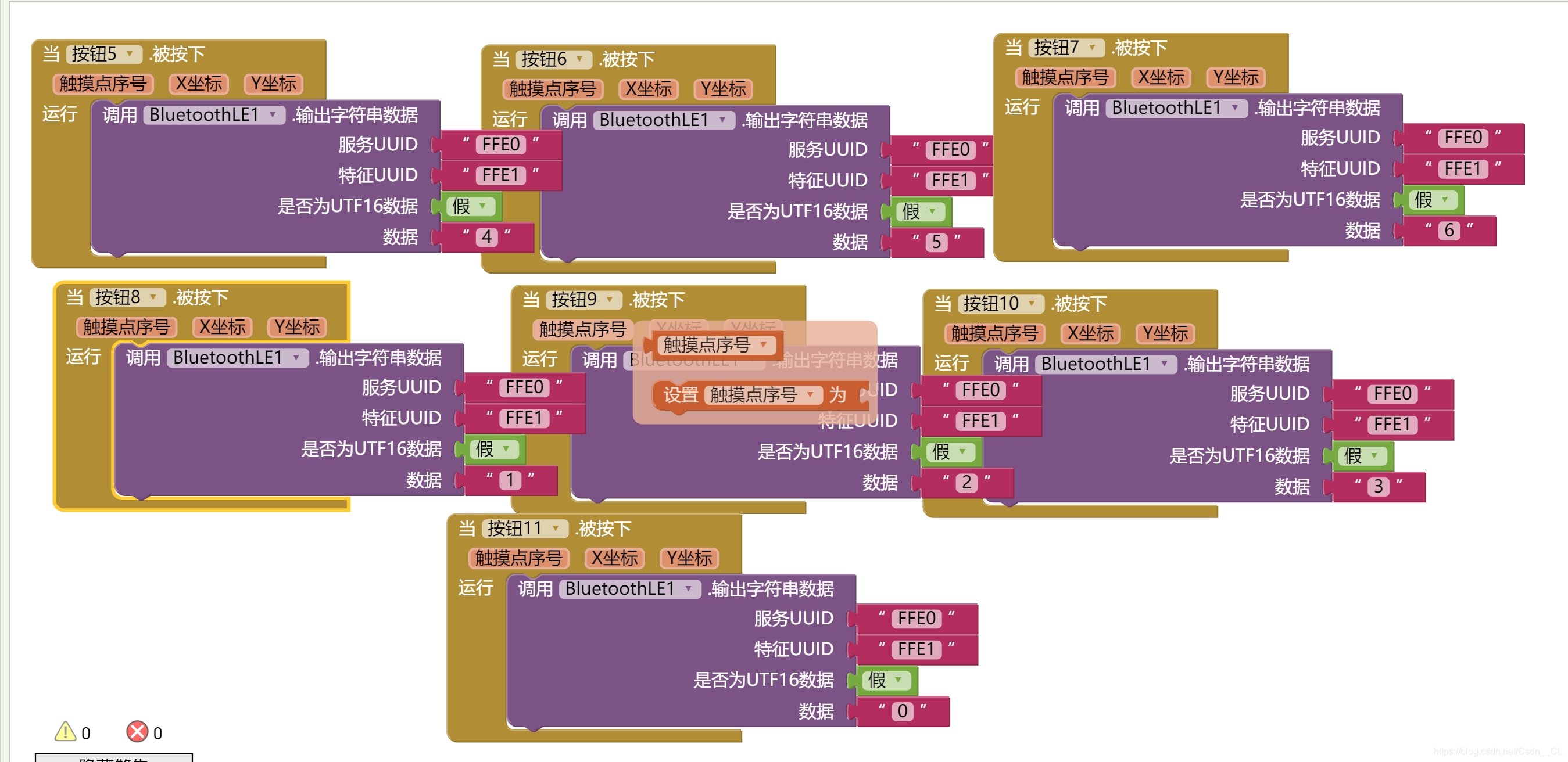
其中服务UUID 特征UUID大家根据自己的蓝牙芯片的 通过串口 调试 命令
例如:
AT+CHRUUID \r\n //查询特征UUID
AT+SVRUUID\r\n //查询服务UUID
\r\n 也就是回车换行 (啰嗦一句了,要不小白太难了)。

















 2580
2580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









