







激光雷达相位法测距
1、原理
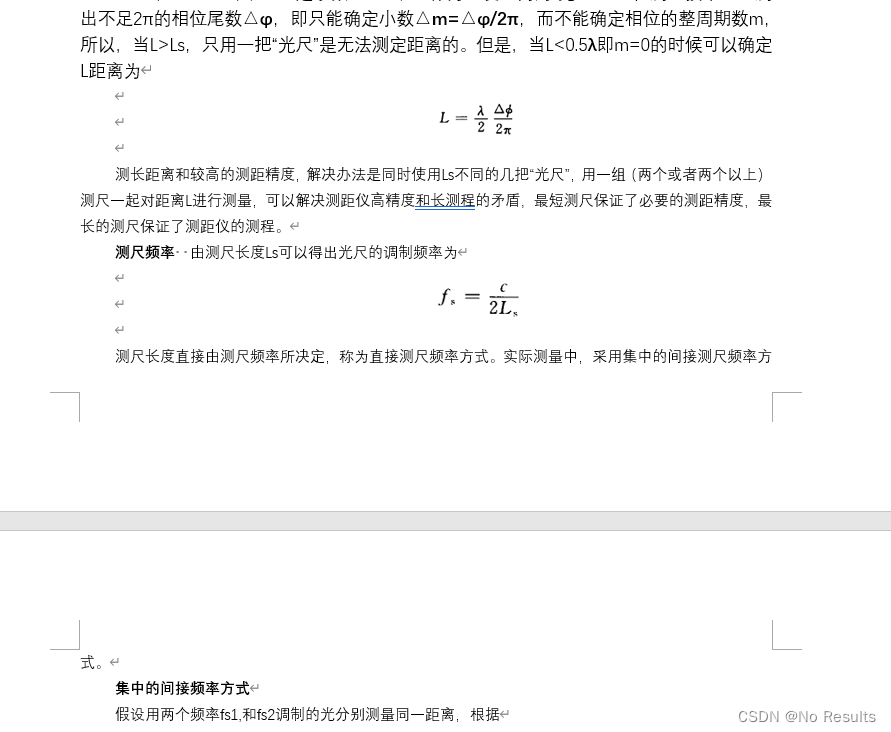
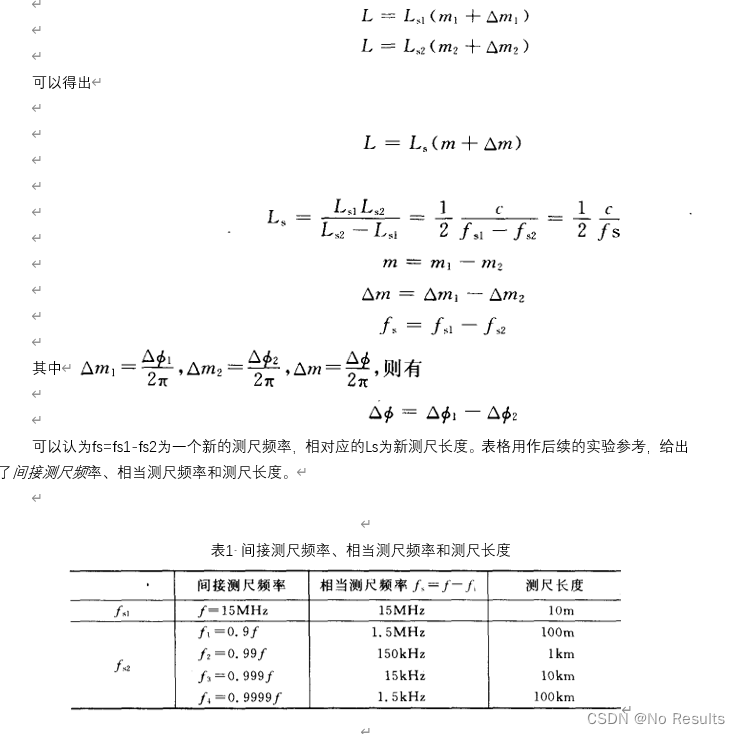
大道至简:求解出发射信号与接收信号的相位差,从而解算出距离。
注意:被测距离一定要小于测尺距离,即Ls>L,△m<1。

[[1]] 张婷,张珂殊.基于Matlab的相位式激光测距研究[J].激光与红外,2010,40(01):22-27.
2、Simulink仿真

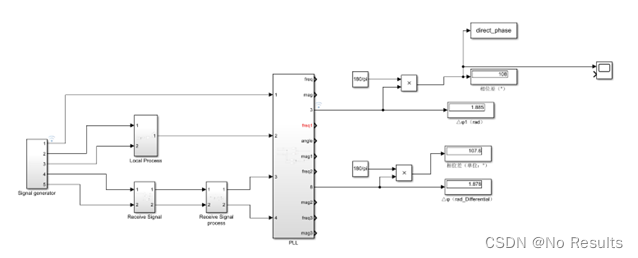
3、实验数据分析
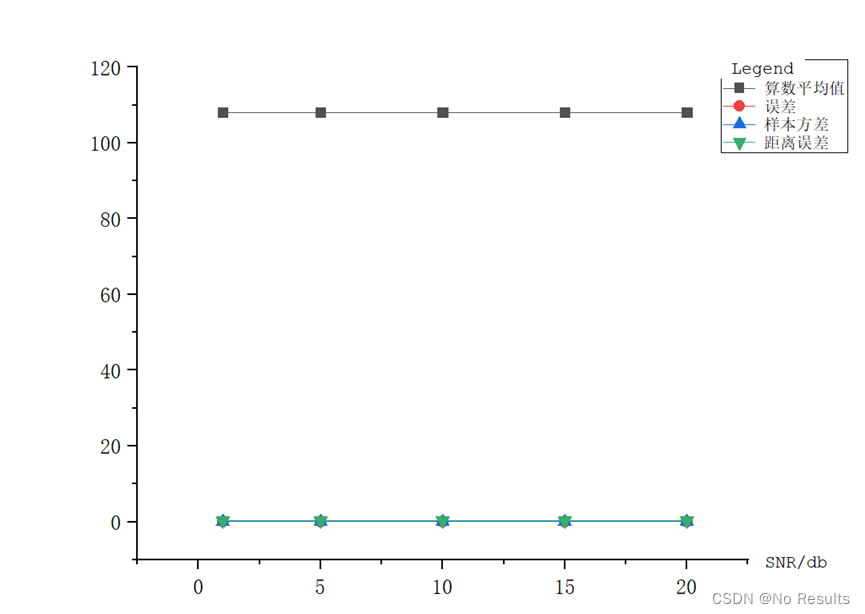
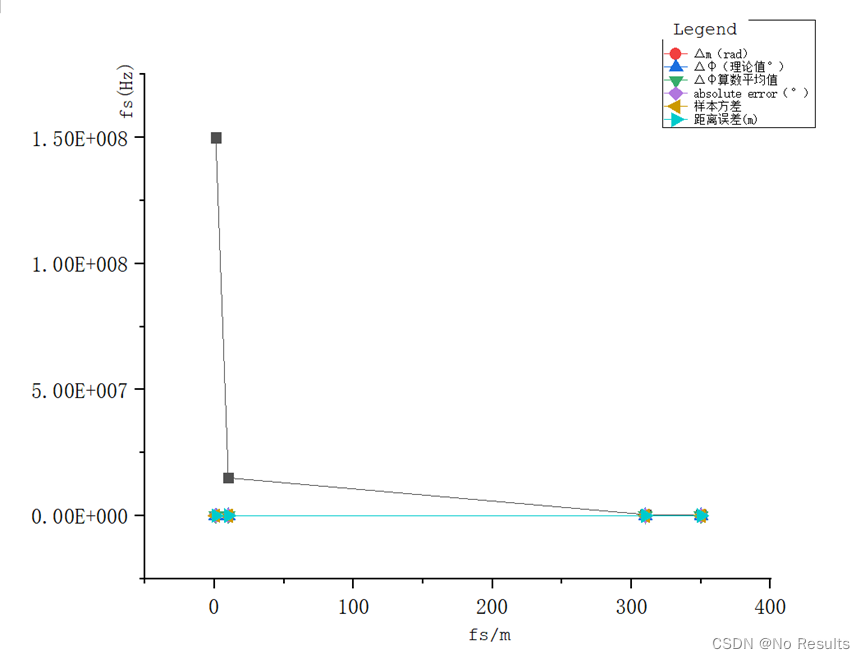
①L=1e-4m,Ls=1m(fs=1.5e8hz),△m=2e-4pi,△φ=0.036°(理论值),△φ算数平均值= 0.0393,误差=0.0033,样本方差= 5.7289e-06,距离误差=9.1667e-06(m)
②L=1e-3m,Ls=10m(fs=1.5e7hz),△m=2e-4pi,△φ=0.036°(理论值),△φ算数平均值= 0.0359,误差= 1.0000e-04,样本方差= 4.6173e-06,距离误差= 3.1489e-06(m)
③L=300m时:
Ls=310m(fs=4.8387e+05hz),△m=1.9355π,△φ=11.61°(理论值),△φ算数平均值=11.6120,误差=0.0020,样本方差=7.5835e-05,距离误差= 0.0017(m)
Ls=350m(fs= 4.2857e+05hz),△m=1.7143π,△φ=51.426°(理论值),△φ算数平均值=51.4576,误差= 0.0316,样本方差=0.0013,距离误差=0.0307(m)














 1549
1549











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









