







EMO:结合 Attention 重新思考移动端小模型中的基本模块
近年来,由于存储和计算资源的限制,移动应用的需求不断增加,因此,本文的研究对象是端侧轻量级小模型 (参数量一般在 10M 以下)。在众多小模型的设计中,值得注意的是 MobileNetv2[1] 提出了一种基于 Depth-wise Convolution 的高效的倒残差模块 (Inverted Residual Block, IRB),已成标准的高效轻量级模型的基本模块。此后,很少有设计基于CNN 的端侧轻量级小模型的新思想被引入,也很少有新的轻量级模块跳出 IRB 范式并部分取代它。
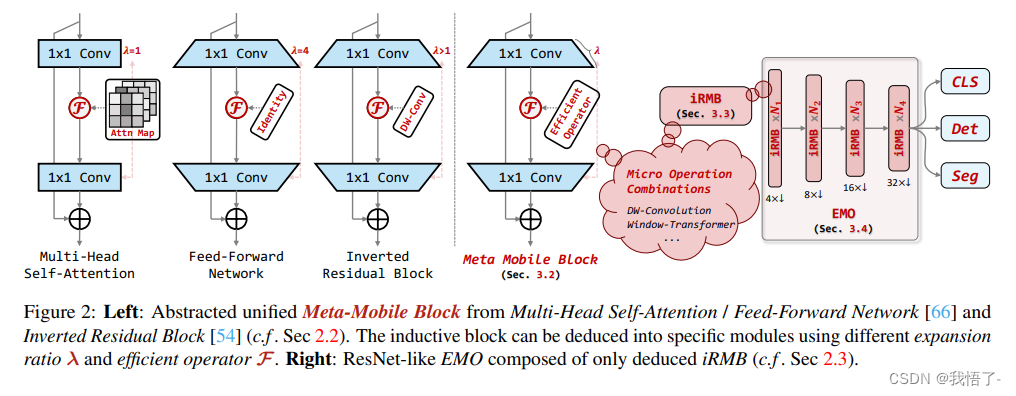
近年来,视觉 Transformer 由于其动态建模和对于超大数据集的泛化能力,已经成功地应用在了各种计算机视觉任务中。但是,Transformer 中的 Multi-Head Self-Attention (MHSA) 模块,受限于参数和计算量的对于输入分辨率的平方复杂度,往往会消耗大量的资源,不适合移动端侧的应用。所以说研究人员最近开始结合 Transformer 与 CNN 模型设计高效的混合模型,并在精度,参数量和 FLOPs 方面获得了比基于 CNN 的模型更好的性能,代表性的工作有:MobileViT[2],MobileViT V2[3],和 MobileViT V3[4]。但是,这些方案往往引入复杂的结构或者混合模块,这对具体应用的优化非常不利。
所以本文作者简单地结合了 IRB 和 Transformer 的设计思路,希望结合 Attention 重新思考移动端小模型中的基本模块。如下图1所示是本文模型 Efficient MOdel (EMO) 与其他端侧轻量级小模型的精度,FLOPs 和 Params 对比。EMO 实现了新的 SoTA,超越了 MViT,EdgeViT 等模型。
原文地址:Rethinking Mobile Block for Efficient Attention-based Models
EMO代码实现
import math
import numpy as np
import torch.nn as nn
from einops import rearrange, reduce
from timm.models.layers.activations import *
from timm.models.layers import DropPath, trunc_normal_, create_attn
from timm.models.efficientnet_blocks import num_groups, SqueezeExcite as SE
from functools import partial
__all__ = ['EMO_1M', 'EMO_2M', 'EMO_5M', 'EMO_6M']
inplace = True
def get_act(act_layer='relu'):
act_dict = {
'none': nn.Identity,
'sigmoid': Sigmoid,
'swish': Swish,
'mish': Mish,
'hsigmoid': HardSigmoid,
'hswish': HardSwish,
'hmish': HardMish,
'tanh': Tanh,
'relu': nn.ReLU,
'relu6': nn.ReLU6,
'prelu': PReLU,
'gelu': GELU,
'silu': nn.SiLU
}
return act_dict[act_layer]
class LayerNorm2d(nn.Module):
def __init__(self, normalized_shape, eps=1e-6, elementwise_affine=True):
super().__init__()
self.norm = nn.LayerNorm(normalized_shape, eps, elementwise_affine)
def forward(self, x):
x = rearrange(x, 'b c h w -> b h w c').contiguous()
x = self.norm(x)
x = rearrange(x, 'b h w c -> b c h w').contiguous()
return x
def get_norm(norm_layer='in_1d'):
eps = 1e-6
norm_dict = {
'none': nn.Identity,
'in_1d': partial(nn.InstanceNorm1d, eps=eps),
'in_2d': partial(nn.InstanceNorm2d, eps=eps),
'in_3d': partial(nn.InstanceNorm3d, eps=eps),
'bn_1d': partial(nn.BatchNorm1d, eps=eps),
'bn_2d': partial(nn.BatchNorm2d, eps=eps),
'bn_3d': partial(nn.BatchNorm3d, eps=eps),
'gn': partial(nn.GroupNorm, eps=eps),
'ln_1d': partial(nn.LayerNorm, eps=eps),
'ln_2d': partial(LayerNorm2d, eps=eps),
}
return norm_dict[norm_layer]
class ConvNormAct(nn.Module):
def __init__(self, dim_in, dim_out, kernel_size, stride=1, dilation=1, groups=1, bias=False,
skip=False, norm_layer='bn_2d', act_layer='relu', inplace=True, drop_path_rate=0.):
super(ConvNormAct, self).__init__()
self.has_skip = skip and dim_in == dim_out
padding = math.ceil((kernel_size - stride) / 2)
self.conv = nn.Conv2d(dim_in, dim_out, kernel_size, stride, padding, dilation, groups, bias)
self.norm = get_norm(norm_layer)(dim_out)
self.act = get_act(act_layer)(inplace=inplace)
self.drop_path = DropPath(drop_path_rate) if drop_path_rate else nn.Identity()
def forward(self, x):
shortcut = x
x = self.conv(x)
x = self.norm(x)
x = self.act(x)
if self.has_skip:
x = self.drop_path(x) + shortcut
return x
inplace = True
# ========== Multi-Scale Populations, for down-sampling and inductive bias ==========
class MSPatchEmb(nn.Module):
def __init__(self, dim_in, emb_dim, kernel_size=2, c_group=-1, stride=1, dilations=[1, 2, 3],
norm_layer='bn_2d', act_layer='silu'):
super().__init__()
self.dilation_num = len(dilations)
assert dim_in % c_group == 0
c_group = math.gcd(dim_in, emb_dim) if c_group == -1 else c_group
self.convs = nn.ModuleList()
for i in range(len(dilations)):
padding = math.ceil(((kernel_size - 1) * dilations[i] + 1 - stride) / 2)
self.convs.append(nn.Sequential(nn.Conv2d(dim_in, emb_dim, kernel_size, stride, padding, dilations[i], groups=c_group),
get_norm(norm_layer)(emb_dim),
get_act(act_layer)(emb_dim)))
def forward(self, x):
if self.dilation_num == 1:
x = self.convs[0](x)
else:
x = torch.cat([self.convs[i](x).unsqueeze(dim=-1) for i in range(self.dilation_num)], dim=-1)
x = reduce(x, 'b c h w n -> b c h w', 'mean').contiguous()
return x
class iRMB(nn.Module):
def __init__(self, dim_in, dim_out, norm_in=True, has_skip=True, exp_ratio=1.0, norm_layer='bn_2d',
act_layer='relu', v_proj=True, dw_ks=3, stride=1, dilation=1, se_ratio=0.0, dim_head=64, window_size=7,
attn_s=True, qkv_bias=False, attn_drop=0., drop=0., drop_path=0., v_group=False, attn_pre=False):
super().__init__()
self.norm = get_norm(norm_layer)(dim_in) if norm_in else nn.Identity()
dim_mid = int(dim_in * exp_ratio)
self.has_skip = (dim_in == dim_out and stride == 1) and has_skip
self.attn_s = attn_s
if self.attn_s:
assert dim_in % dim_head == 0, 'dim should be divisible by num_heads'
self.dim_head = dim_head
self.window_size = window_size
self.num_head = dim_in // dim_head
self.scale = self.dim_head ** -0.5
self.attn_pre = attn_pre
self.qk = ConvNormAct(dim_in, int(dim_in * 2), kernel_size=1, bias=qkv_bias, norm_layer='none', act_layer='none')
self.v = ConvNormAct(dim_in, dim_mid, kernel_size=1, groups=self.num_head if v_group else 1, bias=qkv_bias, norm_layer='none', act_layer=act_layer, inplace=inplace)
self.attn_drop = nn.Dropout(attn_drop)
else:
if v_proj:
self.v = ConvNormAct(dim_in, dim_mid, kernel_size=1, bias=qkv_bias, norm_layer='none', act_layer=act_layer, inplace=inplace)
else:
self.v = nn.Identity()
self.conv_local = ConvNormAct(dim_mid, dim_mid, kernel_size=dw_ks, stride=stride, dilation=dilation, groups=dim_mid, norm_layer='bn_2d', act_layer='silu', inplace=inplace)
self.se = SE(dim_mid, rd_ratio=se_ratio, act_layer=get_act(act_layer)) if se_ratio > 0.0 else nn.Identity()
self.proj_drop = nn.Dropout(drop)
self.proj = ConvNormAct(dim_mid, dim_out, kernel_size=1, norm_layer='none', act_layer='none', inplace=inplace)
self.drop_path = DropPath(drop_path) if drop_path else nn.Identity()
def forward(self, x):
shortcut = x
x = self.norm(x)
B, C, H, W = x.shape
if self.attn_s:
# padding
if self.window_size <= 0:
window_size_W, window_size_H = W, H
else:
window_size_W, window_size_H = self.window_size, self.window_size
pad_l, pad_t = 0, 0
pad_r = (window_size_W - W % window_size_W) % window_size_W
pad_b = (window_size_H - H % window_size_H) % window_size_H
x = F.pad(x, (pad_l, pad_r, pad_t, pad_b, 0, 0,))
n1, n2 = (H + pad_b) // window_size_H, (W + pad_r) // window_size_W
x = rearrange(x, 'b c (h1 n1) (w1 n2) -> (b n1 n2) c h1 w1', n1=n1, n2=n2).contiguous()
# attention
b, c, h, w = x.shape
qk = self.qk(x)
qk = rearrange(qk, 'b (qk heads dim_head) h w -> qk b heads (h w) dim_head', qk=2, heads=self.num_head, dim_head=self.dim_head).contiguous()
q, k = qk[0], qk[1]
attn_spa = (q @ k.transpose(-2, -1)) * self.scale
attn_spa = attn_spa.softmax(dim=-1)
attn_spa = self.attn_drop(attn_spa)
if self.attn_pre:
x = rearrange(x, 'b (heads dim_head) h w -> b heads (h w) dim_head', heads=self.num_head).contiguous()
x_spa = attn_spa @ x
x_spa = rearrange(x_spa, 'b heads (h w) dim_head -> b (heads dim_head) h w', heads=self.num_head, h=h, w=w).contiguous()
x_spa = self.v(x_spa)
else:
v = self.v(x)
v = rearrange(v, 'b (heads dim_head) h w -> b heads (h w) dim_head', heads=self.num_head).contiguous()
x_spa = attn_spa @ v
x_spa = rearrange(x_spa, 'b heads (h w) dim_head -> b (heads dim_head) h w', heads=self.num_head, h=h, w=w).contiguous()
# unpadding
x = rearrange(x_spa, '(b n1 n2) c h1 w1 -> b c (h1 n1) (w1 n2)', n1=n1, n2=n2).contiguous()
if pad_r > 0 or pad_b > 0:
x = x[:, :, :H, :W].contiguous()
else:
x = self.v(x)
x = x + self.se(self.conv_local(x)) if self.has_skip else self.se(self.conv_local(x))
x = self.proj_drop(x)
x = self.proj(x)
x = (shortcut + self.drop_path(x)) if self.has_skip else x
return x
class EMO(nn.Module):
def __init__(self, dim_in=3, num_classes=1000, img_size=224,
depths=[1, 2, 4, 2], stem_dim=16, embed_dims=[64, 128, 256, 512], exp_ratios=[4., 4., 4., 4.],
norm_layers=['bn_2d', 'bn_2d', 'bn_2d', 'bn_2d'], act_layers=['relu', 'relu', 'relu', 'relu'],
dw_kss=[3, 3, 5, 5], se_ratios=[0.0, 0.0, 0.0, 0.0], dim_heads=[32, 32, 32, 32],
window_sizes=[7, 7, 7, 7], attn_ss=[False, False, True, True], qkv_bias=True,
attn_drop=0., drop=0., drop_path=0., v_group=False, attn_pre=False, pre_dim=0):
super().__init__()
self.num_classes = num_classes
assert num_classes > 0
dprs = [x.item() for x in torch.linspace(0, drop_path, sum(depths))]
self.stage0 = nn.ModuleList([
MSPatchEmb( # down to 112
dim_in, stem_dim, kernel_size=dw_kss[0], c_group=1, stride=2, dilations=[1],
norm_layer=norm_layers[0], act_layer='none'),
iRMB( # ds
stem_dim, stem_dim, norm_in=False, has_skip=False, exp_ratio=1,
norm_layer=norm_layers[0], act_layer=act_layers[0], v_proj=False, dw_ks=dw_kss[0],
stride=1, dilation=1, se_ratio=1,
dim_head=dim_heads[0], window_size=window_sizes[0], attn_s=False,
qkv_bias=qkv_bias, attn_drop=attn_drop, drop=drop, drop_path=0.,
attn_pre=attn_pre
)
])
emb_dim_pre = stem_dim
for i in range(len(depths)):
layers = []
dpr = dprs[sum(depths[:i]):sum(depths[:i + 1])]
for j in range(depths[i]):
if j == 0:
stride, has_skip, attn_s, exp_ratio = 2, False, False, exp_ratios[i] * 2
else:
stride, has_skip, attn_s, exp_ratio = 1, True, attn_ss[i], exp_ratios[i]
layers.append(iRMB(
emb_dim_pre, embed_dims[i], norm_in=True, has_skip=has_skip, exp_ratio=exp_ratio,
norm_layer=norm_layers[i], act_layer=act_layers[i], v_proj=True, dw_ks=dw_kss[i],
stride=stride, dilation=1, se_ratio=se_ratios[i],
dim_head=dim_heads[i], window_size=window_sizes[i], attn_s=attn_s,
qkv_bias=qkv_bias, attn_drop=attn_drop, drop=drop, drop_path=dpr[j], v_group=v_group,
attn_pre=attn_pre
))
emb_dim_pre = embed_dims[i]
self.__setattr__(f'stage{i + 1}', nn.ModuleList(layers))
self.norm = get_norm(norm_layers[-1])(embed_dims[-1])
self.apply(self._init_weights)
self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def _init_weights(self, m):
if isinstance(m, nn.Linear):
trunc_normal_(m.weight, std=.02)
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, (nn.LayerNorm, nn.GroupNorm,
nn.BatchNorm1d, nn.BatchNorm2d, nn.BatchNorm3d,
nn.InstanceNorm1d, nn.InstanceNorm2d, nn.InstanceNorm3d)):
nn.init.zeros_(m.bias)
nn.init.ones_(m.weight)
@torch.jit.ignore
def no_weight_decay(self):
return {'token'}
@torch.jit.ignore
def no_weight_decay_keywords(self):
return {'alpha', 'gamma', 'beta'}
@torch.jit.ignore
def no_ft_keywords(self):
# return {'head.weight', 'head.bias'}
return {}
@torch.jit.ignore
def ft_head_keywords(self):
return {'head.weight', 'head.bias'}, self.num_classes
def get_classifier(self):
return self.head
def reset_classifier(self, num_classes):
self.num_classes = num_classes
self.head = nn.Linear(self.pre_dim, num_classes) if num_classes > 0 else nn.Identity()
def check_bn(self):
for name, m in self.named_modules():
if isinstance(m, nn.modules.batchnorm._NormBase):
m.running_mean = torch.nan_to_num(m.running_mean, nan=0, posinf=1, neginf=-1)
m.running_var = torch.nan_to_num(m.running_var, nan=0, posinf=1, neginf=-1)
def forward_features(self, x):
for blk in self.stage0:
x = blk(x)
x1 = x
for blk in self.stage1:
x = blk(x)
x2 = x
for blk in self.stage2:
x = blk(x)
x3 = x
for blk in self.stage3:
x = blk(x)
x4 = x
for blk in self.stage4:
x = blk(x)
x5 = x
return [x1, x2, x3, x4, x5]
def forward(self, x):
x = self.forward_features(x)
x[-1] = self.norm(x[-1])
return x
def update_weight(model_dict, weight_dict):
idx, temp_dict = 0, {}
for k, v in weight_dict.items():
if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):
temp_dict[k] = v
idx += 1
model_dict.update(temp_dict)
print(f'loading weights... {idx}/{len(model_dict)} items')
return model_dict
def EMO_1M(weights='', **kwargs):
model = EMO(
# dim_in=3, num_classes=1000, img_size=224,
depths=[2, 2, 8, 3], stem_dim=24, embed_dims=[32, 48, 80, 168], exp_ratios=[2., 2.5, 3.0, 3.5],
norm_layers=['bn_2d', 'bn_2d', 'ln_2d', 'ln_2d'], act_layers=['silu', 'silu', 'gelu', 'gelu'],
dw_kss=[3, 3, 5, 5], dim_heads=[16, 16, 20, 21], window_sizes=[7, 7, 7, 7], attn_ss=[False, False, True, True],
qkv_bias=True, attn_drop=0., drop=0., drop_path=0.04036, v_group=False, attn_pre=True, pre_dim=0,
**kwargs)
if weights:
pretrained_weight = torch.load(weights)
model.load_state_dict(update_weight(model.state_dict(), pretrained_weight))
return model
def EMO_2M(weights='', **kwargs):
model = EMO(
# dim_in=3, num_classes=1000, img_size=224,
depths=[3, 3, 9, 3], stem_dim=24, embed_dims=[32, 48, 120, 200], exp_ratios=[2., 2.5, 3.0, 3.5],
norm_layers=['bn_2d', 'bn_2d', 'ln_2d', 'ln_2d'], act_layers=['silu', 'silu', 'gelu', 'gelu'],
dw_kss=[3, 3, 5, 5], dim_heads=[16, 16, 20, 20], window_sizes=[7, 7, 7, 7], attn_ss=[False, False, True, True],
qkv_bias=True, attn_drop=0., drop=0., drop_path=0.05, v_group=False, attn_pre=True, pre_dim=0,
**kwargs)
if weights:
pretrained_weight = torch.load(weights)
model.load_state_dict(update_weight(model.state_dict(), pretrained_weight))
return model
def EMO_5M(weights='', **kwargs):
model = EMO(
# dim_in=3, num_classes=1000, img_size=224,
depths=[3, 3, 9, 3], stem_dim=24, embed_dims=[48, 72, 160, 288], exp_ratios=[2., 3., 4., 4.],
norm_layers=['bn_2d', 'bn_2d', 'ln_2d', 'ln_2d'], act_layers=['silu', 'silu', 'gelu', 'gelu'],
dw_kss=[3, 3, 5, 5], dim_heads=[24, 24, 32, 32], window_sizes=[7, 7, 7, 7], attn_ss=[False, False, True, True],
qkv_bias=True, attn_drop=0., drop=0., drop_path=0.05, v_group=False, attn_pre=True, pre_dim=0,
**kwargs)
if weights:
pretrained_weight = torch.load(weights)
model.load_state_dict(update_weight(model.state_dict(), pretrained_weight))
return model
def EMO_6M(weights='', **kwargs):
model = EMO(
# dim_in=3, num_classes=1000, img_size=224,
depths=[3, 3, 9, 3], stem_dim=24, embed_dims=[48, 72, 160, 320], exp_ratios=[2., 3., 4., 5.],
norm_layers=['bn_2d', 'bn_2d', 'ln_2d', 'ln_2d'], act_layers=['silu', 'silu', 'gelu', 'gelu'],
dw_kss=[3, 3, 5, 5], dim_heads=[16, 24, 20, 32], window_sizes=[7, 7, 7, 7], attn_ss=[False, False, True, True],
qkv_bias=True, attn_drop=0., drop=0., drop_path=0.05, v_group=False, attn_pre=True, pre_dim=0,
**kwargs)
if weights:
pretrained_weight = torch.load(weights)
model.load_state_dict(update_weight(model.state_dict(), pretrained_weight))
return model
if __name__ == '__main__':
model = EMO_1M('EMO_1M/net.pth')
model = EMO_2M('EMO_2M/net.pth')
model = EMO_5M('EMO_5M/net.pth')
model = EMO_6M('EMO_6M/net.pth')
Backbone替换
yolo.py修改
def parse_model函数
def parse_model(d, ch): # model_dict, input_channels(3)
# Parse a YOLOv5 model.yaml dictionary
LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
anchors, nc, gd, gw, act = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple'], d.get('activation')
if act:
Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
LOGGER.info(f"{colorstr('activation:')} {act}") # print
na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
is_backbone = False
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
try:
t = m
m = eval(m) if isinstance(m, str) else m # eval strings
except:
pass
for j, a in enumerate(args):
with contextlib.suppress(NameError):
try:
args[j] = eval(a) if isinstance(a, str) else a # eval strings
except:
args[j] = a
n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
if m in {
Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x}:
c1, c2 = ch[f], args[0]
if c2 != no: # if not output
c2 = make_divisible(c2 * gw, 8)
args = [c1, c2, *args[1:]]
if m in {BottleneckCSP, C3, C3TR, C3Ghost, C3x}:
args.insert(2, n) # number of repeats
n = 1
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
# TODO: channel, gw, gd
elif m in {Detect, Segment}:
args.append([ch[x] for x in f])
if isinstance(args[1], int): # number of anchors
args[1] = [list(range(args[1] * 2))] * len(f)
if m is Segment:
args[3] = make_divisible(args[3] * gw, 8)
elif m is Contract:
c2 = ch[f] * args[0] ** 2
elif m is Expand:
c2 = ch[f] // args[0] ** 2
elif isinstance(m, str):
t = m
m = timm.create_model(m, pretrained=args[0], features_only=True)
c2 = m.feature_info.channels()
elif m in {EMO_1M'}: #可添加更多Backbone
m = m(*args)
c2 = m.channel
else:
c2 = ch[f]
if isinstance(c2, list):
is_backbone = True
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type, m_.np = i + 4 if is_backbone else i, f, t, np # attach index, 'from' index, type, number params
LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
save.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
for _ in range(5 - len(ch)):
ch.insert(0, 0)
else:
ch.append(c2)
return nn.Sequential(*layers), sorted(save)
def _forward_once函数
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
for _ in range(5 - len(x)):
x.insert(0, None)
for i_idx, i in enumerate(x):
if i_idx in self.save:
y.append(i)
else:
y.append(None)
x = x[-1]
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x
yaml配置文件
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# 0-P1/2
# 1-P2/4
# 2-P3/8
# 3-P4/16
# 4-P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, EMO_1M, [False]], # 4
[-1, 1, SPPF, [1024, 5]], # 5
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]], # 6
[-1, 1, nn.Upsample, [None, 2, 'nearest']], # 7
[[-1, 3], 1, Concat, [1]], # cat backbone P4 8
[-1, 3, C3, [512, False]], # 9
[-1, 1, Conv, [256, 1, 1]], # 10
[-1, 1, nn.Upsample, [None, 2, 'nearest']], # 11
[[-1, 2], 1, Concat, [1]], # cat backbone P3 12
[-1, 3, C3, [256, False]], # 13 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]], # 14
[[-1, 10], 1, Concat, [1]], # cat head P4 15
[-1, 3, C3, [512, False]], # 16 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]], # 17
[[-1, 5], 1, Concat, [1]], # cat head P5 18
[-1, 3, C3, [1024, False]], # 19 (P5/32-large)
[[13, 16, 19], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]

















 1019
1019











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











