







RIFormer简介
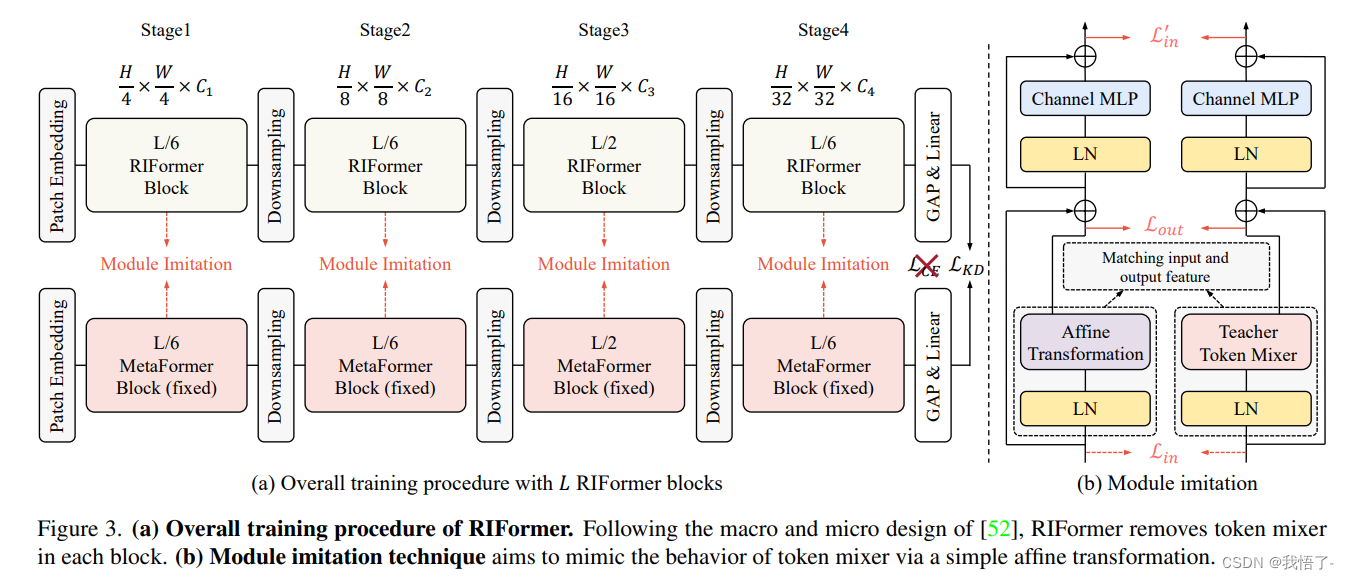
Token Mixer是ViT骨干非常重要的组成成分,它用于对不同空域位置信息进行自适应聚合,但常规的自注意力往往存在高计算复杂度与高延迟问题。而直接移除Token Mixer又会导致不完备的结构先验,进而导致严重的性能下降。
原文地址:RIFormer: Keep Your Vision Backbone Effective But Removing Token Mixer
基于此,本文基于重参数机制提出了RepIdentityFormer方案以研究无Token Mixer的架构体系。紧接着,作者改进了学习架构以打破无Token Mixer架构的局限性并总结了5条指导方针。搭配上所提优化策略后,本文构建了一种极致简单且具有优异性能的视觉骨干,此外它还具有高推理效率优势。
实验结果表明:通过合适的优化策略,网络结构的归纳偏置可以被集成进简单架构体系中。本文为后续优化驱动的高效网络设计提供了新的起点和思路。
RIFormer代码实现
# Copyright (c) OpenMMLab. All rights reserved.
from typing import Sequence
import torch
import torch.nn as nn
import numpy as np
from mmcv.cnn.bricks import DropPath, build_activation_layer, build_norm_layer
from mmengine.model import BaseModule
__all__ = ['RIFormer']
class Mlp(nn.Module):
"""Mlp implemented by with 1*1 convolutions.
Input: Tensor with shape [B, C, H, W].
Output: Tensor with shape [B, C, H, W].
Args:
in_features (int): Dimension of input features.
hidden_features (int): Dimension of hidden features.
out_features (int): Dimension of output features.
act_cfg (dict): The config dict for activation between pointwise
convolution. Defaults to ``dict(type='GELU')``.
drop (float): Dropout rate. Defaults to 0.0.
"""
def __init__(self,
in_features,
hidden_features=None,
out_features=None,
act_cfg=dict(type='GELU'),
drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Conv2d(in_features, hidden_features, 1)
self.act = build_activation_layer(act_cfg)
self.fc2 = nn.Conv2d(hidden_features, out_features, 1)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class PatchEmbed(nn.Module):
"""Patch Embedding module implemented by a layer of convolution.
Input: tensor in shape [B, C, H, W]
Output: tensor in shape [B, C, H/stride, W/stride]
Args:
patch_size (int): Patch size of the patch embedding. Defaults to 16.
stride (int): Stride of the patch embedding. Defaults to 16.
padding (int): Padding of the patch embedding. Defaults to 0.
in_chans (int): Input channels. Defaults to 3.
embed_dim (int): Output dimension of the patch embedding.
Defaults to 768.
norm_layer (module): Normalization module. Defaults to None (not use).
"""
def __init__(self,
patch_size=16,
stride=16,
padding=0,
in_chans=3,
embed_dim=768,
norm_layer=None):
super().__init__()
self.proj = nn.Conv2d(
in_chans,
embed_dim,
kernel_size=patch_size,
stride=stride,
padding=padding)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self, x):
x = self.proj(x)
x = self.norm(x)
return x
class Affine(nn.Module):
"""Affine Transformation module.
Args:
in_features (int): Input dimension.
"""
def __init__(self, in_features):
super().__init__()
self.affine = nn.Conv2d(
in_features,
in_features,
kernel_size=1,
stride=1,
padding=0,
groups=in_features,
bias=True)
def forward(self, x):
return self.affine(x) - x
class RIFormerBlock(BaseModule):
"""RIFormer Block.
Args:
dim (int): Embedding dim.
mlp_ratio (float): Mlp expansion ratio. Defaults to 4.
norm_cfg (dict): The config dict for norm layers.
Defaults to ``dict(type='GN', num_groups=1)``.
act_cfg (dict): The config dict for activation between pointwise
convolution. Defaults to ``dict(type='GELU')``.
drop (float): Dropout rate. Defaults to 0.
drop_path (float): Stochastic depth rate. Defaults to 0.
layer_scale_init_value (float): Init value for Layer Scale.
Defaults to 1e-5.
deploy (bool): Whether to switch the model structure to
deployment mode. Default: False.
"""
def __init__(self,
dim,
mlp_ratio=4.,
norm_cfg=dict(type='GN', num_groups=1),
act_cfg=dict(type='GELU'),
drop=0.,
drop_path=0.,
layer_scale_init_value=1e-5,
deploy=False):
super().__init__()
if deploy:
self.norm_reparam = build_norm_layer(norm_cfg, dim)[1]
else:
self.norm1 = build_norm_layer(norm_cfg, dim)[1]
self.token_mixer = Affine(in_features=dim)
self.norm2 = build_norm_layer(norm_cfg, dim)[1]
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(
in_features=dim,
hidden_features=mlp_hidden_dim,
act_cfg=act_cfg,
drop=drop)
# The following two techniques are useful to train deep RIFormers.
self.drop_path = DropPath(drop_path) if drop_path > 0. \
else nn.Identity()
self.layer_scale_1 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
self.layer_scale_2 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
self.norm_cfg = norm_cfg
self.dim = dim
self.deploy = deploy
def forward(self, x):
if hasattr(self, 'norm_reparam'):
x = x + self.drop_path(
self.layer_scale_1.unsqueeze(-1).unsqueeze(-1) *
self.norm_reparam(x))
x = x + self.drop_path(
self.layer_scale_2.unsqueeze(-1).unsqueeze(-1) *
self.mlp(self.norm2(x)))
else:
x = x + self.drop_path(
self.layer_scale_1.unsqueeze(-1).unsqueeze(-1) *
self.token_mixer(self.norm1(x)))
x = x + self.drop_path(
self.layer_scale_2.unsqueeze(-1).unsqueeze(-1) *
self.mlp(self.norm2(x)))
return x
def fuse_affine(self, norm, token_mixer):
gamma_affn = token_mixer.affine.weight.reshape(-1)
gamma_affn = gamma_affn - torch.ones_like(gamma_affn)
beta_affn = token_mixer.affine.bias
gamma_ln = norm.weight
beta_ln = norm.bias
return (gamma_ln * gamma_affn), (beta_ln * gamma_affn + beta_affn)
def get_equivalent_scale_bias(self):
eq_s, eq_b = self.fuse_affine(self.norm1, self.token_mixer)
return eq_s, eq_b
def switch_to_deploy(self):
if self.deploy:
return
eq_s, eq_b = self.get_equivalent_scale_bias()
self.norm_reparam = build_norm_layer(self.norm_cfg, self.dim)[1]
self.norm_reparam.weight.data = eq_s
self.norm_reparam.bias.data = eq_b
self.__delattr__('norm1')
if hasattr(self, 'token_mixer'):
self.__delattr__('token_mixer')
self.deploy = True
def basic_blocks(dim,
index,
layers,
mlp_ratio=4.,
norm_cfg=dict(type='GN', num_groups=1),
act_cfg=dict(type='GELU'),
drop_rate=.0,
drop_path_rate=0.,
layer_scale_init_value=1e-5,
deploy=False):
"""generate RIFormer blocks for a stage."""
blocks = []
for block_idx in range(layers[index]):
block_dpr = drop_path_rate * (block_idx + sum(layers[:index])) / (
sum(layers) - 1)
blocks.append(
RIFormerBlock(
dim,
mlp_ratio=mlp_ratio,
norm_cfg=norm_cfg,
act_cfg=act_cfg,
drop=drop_rate,
drop_path=block_dpr,
layer_scale_init_value=layer_scale_init_value,
deploy=deploy,
))
blocks = nn.Sequential(*blocks)
return blocks
def update_weight(model_dict, weight_dict):
idx, temp_dict = 0, {}
for k, v in weight_dict.items():
k = k[9:]
if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):
temp_dict[k] = v
idx += 1
model_dict.update(temp_dict)
print(f'loading weights... {idx}/{len(model_dict)} items')
return model_dict
class RIFormer(nn.Module):
"""RIFormer.
A PyTorch implementation of RIFormer introduced by:
`RIFormer: Keep Your Vision Backbone Effective But Removing Token Mixer <https://arxiv.org/abs/xxxx.xxxxx>`_
Args:
arch (str | dict): The model's architecture. If string, it should be
one of architecture in ``RIFormer.arch_settings``. And if dict, it
should include the following two keys:
- layers (list[int]): Number of blocks at each stage.
- embed_dims (list[int]): The number of channels at each stage.
- mlp_ratios (list[int]): Expansion ratio of MLPs.
- layer_scale_init_value (float): Init value for Layer Scale.
Defaults to 'S12'.
norm_cfg (dict): The config dict for norm layers.
Defaults to ``dict(type='LN2d', eps=1e-6)``.
act_cfg (dict): The config dict for activation between pointwise
convolution. Defaults to ``dict(type='GELU')``.
in_patch_size (int): The patch size of/? input image patch embedding.
Defaults to 7.
in_stride (int): The stride of input image patch embedding.
Defaults to 4.
in_pad (int): The padding of input image patch embedding.
Defaults to 2.
down_patch_size (int): The patch size of downsampling patch embedding.
Defaults to 3.
down_stride (int): The stride of downsampling patch embedding.
Defaults to 2.
down_pad (int): The padding of downsampling patch embedding.
Defaults to 1.
drop_rate (float): Dropout rate. Defaults to 0.
drop_path_rate (float): Stochastic depth rate. Defaults to 0.
out_indices (Sequence | int): Output from which network position.
Index 0-6 respectively corresponds to
[stage1, downsampling, stage2, downsampling, stage3, downsampling, stage4]
Defaults to -1, means the last stage.
frozen_stages (int): Stages to be frozen (all param fixed).
Defaults to -1, which means not freezing any parameters.
deploy (bool): Whether to switch the model structure to
deployment mode. Default: False.
init_cfg (dict, optional): Initialization config dict
""" # noqa: E501
# --layers: [x,x,x,x], numbers of layers for the four stages
# --embed_dims, --mlp_ratios:
# embedding dims and mlp ratios for the four stages
# --downsamples: flags to apply downsampling or not in four blocks
arch_settings = {
's12': {
'layers': [2, 2, 6, 2],
'embed_dims': [64, 128, 320, 512],
'mlp_ratios': [4, 4, 4, 4],
'layer_scale_init_value': 1e-5,
},
's24': {
'layers': [4, 4, 12, 4],
'embed_dims': [64, 128, 320, 512],
'mlp_ratios': [4, 4, 4, 4],
'layer_scale_init_value': 1e-5,
},
's36': {
'layers': [6, 6, 18, 6],
'embed_dims': [64, 128, 320, 512],
'mlp_ratios': [4, 4, 4, 4],
'layer_scale_init_value': 1e-6,
},
'm36': {
'layers': [6, 6, 18, 6],
'embed_dims': [96, 192, 384, 768],
'mlp_ratios': [4, 4, 4, 4],
'layer_scale_init_value': 1e-6,
},
'm48': {
'layers': [8, 8, 24, 8],
'embed_dims': [96, 192, 384, 768],
'mlp_ratios': [4, 4, 4, 4],
'layer_scale_init_value': 1e-6,
},
}
def __init__(self,
arch='s12',
weights = '',
in_channels=3,
norm_cfg=dict(type='GN', num_groups=1),
act_cfg=dict(type='GELU'),
in_patch_size=7,
in_stride=4,
in_pad=2,
down_patch_size=3,
down_stride=2,
down_pad=1,
drop_rate=0.,
drop_path_rate=0.,
out_indices=[0, 2, 4, 6],
deploy=False):
super().__init__()
if isinstance(arch, str):
assert arch in self.arch_settings, \
f'Unavailable arch, please choose from ' \
f'({set(self.arch_settings)}) or pass a dict.'
arch = self.arch_settings[arch]
elif isinstance(arch, dict):
assert 'layers' in arch and 'embed_dims' in arch, \
f'The arch dict must have "layers" and "embed_dims", ' \
f'but got {list(arch.keys())}.'
layers = arch['layers']
embed_dims = arch['embed_dims']
mlp_ratios = arch['mlp_ratios'] \
if 'mlp_ratios' in arch else [4, 4, 4, 4]
layer_scale_init_value = arch['layer_scale_init_value'] \
if 'layer_scale_init_value' in arch else 1e-5
self.patch_embed = PatchEmbed(
patch_size=in_patch_size,
stride=in_stride,
padding=in_pad,
in_chans=in_channels,
embed_dim=embed_dims[0])
# set the main block in network
network = []
for i in range(len(layers)):
stage = basic_blocks(
embed_dims[i],
i,
layers,
mlp_ratio=mlp_ratios[i],
norm_cfg=norm_cfg,
act_cfg=act_cfg,
drop_rate=drop_rate,
drop_path_rate=drop_path_rate,
layer_scale_init_value=layer_scale_init_value,
deploy=deploy)
network.append(stage)
if i >= len(layers) - 1:
break
if embed_dims[i] != embed_dims[i + 1]:
# downsampling between two stages
network.append(
PatchEmbed(
patch_size=down_patch_size,
stride=down_stride,
padding=down_pad,
in_chans=embed_dims[i],
embed_dim=embed_dims[i + 1]))
self.network = nn.ModuleList(network)
if isinstance(out_indices, int):
out_indices = [out_indices]
assert isinstance(out_indices, Sequence), \
f'"out_indices" must by a sequence or int, ' \
f'get {type(out_indices)} instead.'
for i, index in enumerate(out_indices):
if index < 0:
out_indices[i] = 7 + index
assert out_indices[i] >= 0, f'Invalid out_indices {index}'
self.out_indices = out_indices
if self.out_indices:
for i_layer in self.out_indices:
layer = build_norm_layer(norm_cfg,
embed_dims[(i_layer + 1) // 2])[1]
layer_name = f'norm{i_layer}'
self.add_module(layer_name, layer)
self.deploy = deploy
if weights:
self.load_state_dict(update_weight(self.state_dict(), torch.load(weights)['state_dict']))
self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def forward_embeddings(self, x):
x = self.patch_embed(x)
return x
def forward_tokens(self, x):
outs = []
for idx, block in enumerate(self.network):
x = block(x)
if idx in self.out_indices:
norm_layer = getattr(self, f'norm{idx}')
x_out = norm_layer(x)
outs.append(x_out)
return outs
def forward(self, x):
# input embedding
x = self.forward_embeddings(x)
# through backbone
x = self.forward_tokens(x)
return x
if __name__ == '__main__':
model = RIFormer('s12', 'riformer-s12_32xb128_in1k-384px_20230406-145eda4c.pth')
inputs = torch.randn((1, 3, 640, 640))
for i in model(inputs):
print(i.size())
Backbone替换
yolo.py修改
def parse_model函数
def parse_model(d, ch): # model_dict, input_channels(3)
# Parse a YOLOv5 model.yaml dictionary
LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
anchors, nc, gd, gw, act = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple'], d.get('activation')
if act:
Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
LOGGER.info(f"{colorstr('activation:')} {act}") # print
na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
is_backbone = False
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
try:
t = m
m = eval(m) if isinstance(m, str) else m # eval strings
except:
pass
for j, a in enumerate(args):
with contextlib.suppress(NameError):
try:
args[j] = eval(a) if isinstance(a, str) else a # eval strings
except:
args[j] = a
n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
if m in {
Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x}:
c1, c2 = ch[f], args[0]
if c2 != no: # if not output
c2 = make_divisible(c2 * gw, 8)
args = [c1, c2, *args[1:]]
if m in {BottleneckCSP, C3, C3TR, C3Ghost, C3x}:
args.insert(2, n) # number of repeats
n = 1
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
# TODO: channel, gw, gd
elif m in {Detect, Segment}:
args.append([ch[x] for x in f])
if isinstance(args[1], int): # number of anchors
args[1] = [list(range(args[1] * 2))] * len(f)
if m is Segment:
args[3] = make_divisible(args[3] * gw, 8)
elif m is Contract:
c2 = ch[f] * args[0] ** 2
elif m is Expand:
c2 = ch[f] // args[0] ** 2
elif isinstance(m, str):
t = m
m = timm.create_model(m, pretrained=args[0], features_only=True)
c2 = m.feature_info.channels()
elif m in {RIFormer}: #添加Backbone
m = m(*args)
c2 = m.channel
else:
c2 = ch[f]
if isinstance(c2, list):
is_backbone = True
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type, m_.np = i + 4 if is_backbone else i, f, t, np # attach index, 'from' index, type, number params
LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
save.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
for _ in range(5 - len(ch)):
ch.insert(0, 0)
else:
ch.append(c2)
return nn.Sequential(*layers), sorted(save)
def _forward_once函数
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
for _ in range(5 - len(x)):
x.insert(0, None)
for i_idx, i in enumerate(x):
if i_idx in self.save:
y.append(i)
else:
y.append(None)
x = x[-1]
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x
创建.yaml配置文件
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# 0-P1/2
# 1-P2/4
# 2-P3/8
# 3-P4/16
# 4-P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, RIFormer, [False]], # 4
[-1, 1, SPPF, [1024, 5]], # 5
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]], # 6
[-1, 1, nn.Upsample, [None, 2, 'nearest']], # 7
[[-1, 3], 1, Concat, [1]], # cat backbone P4 8
[-1, 3, C3, [512, False]], # 9
[-1, 1, Conv, [256, 1, 1]], # 10
[-1, 1, nn.Upsample, [None, 2, 'nearest']], # 11
[[-1, 2], 1, Concat, [1]], # cat backbone P3 12
[-1, 3, C3, [256, False]], # 13 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]], # 14
[[-1, 10], 1, Concat, [1]], # cat head P4 15
[-1, 3, C3, [512, False]], # 16 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]], # 17
[[-1, 5], 1, Concat, [1]], # cat head P5 18
[-1, 3, C3, [1024, False]], # 19 (P5/32-large)
[[13, 16, 19], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
















 5325
5325











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











