






西门子PLC配KUKA机器人程序
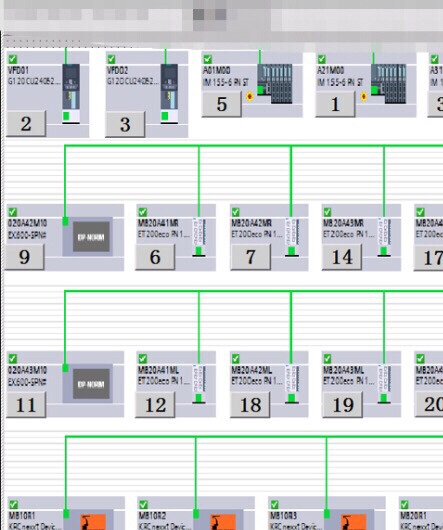
程序为西门子S7-1500PLC博途调试:
西门子与KUKA机器人通讯;
PLC控制KUKA机器人安全回路,设备安全装置控制;
PLC与KUKA机器人信号交互,外部自动控制;
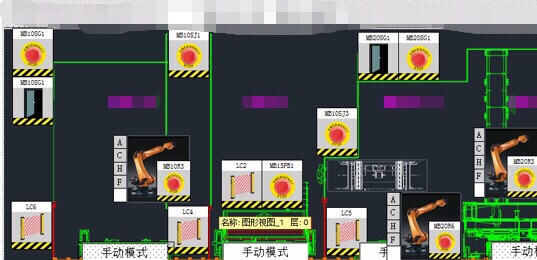
PLC控制KUKA机器人干涉区zone逻辑;
PLC控制KUKA机器人程序段segment逻辑;
PLC控制SEW电机变频运动程序;
PLC控制外围设备夹具动作;
PLC系统有手动/自动/强制/空循环/多车型运行方式;
配置触摸屏HMI,程序带详细注释等等。
项目为汽车焊装程序,工程大设备多程序复杂,是学习西门子PLC或调试项目绝佳参考案例。
ID:9320635393529758
起司甜茶小仙女
西门子PLC配KUKA机器人程序的调试是一个复杂而重要的过程。在这个过程中,我们需要确保PLC和机器人之间的通讯正常,并且能够实现各种功能。
首先,PLC需要控制KUKA机器人的安全回路和设备安全装置。这意味着PLC必须能够监测和控制各种安全信号,以确保机器人在操作过程中不会对人员造成危险。通过与KUKA机器人的信号交互,PLC可以实现外部自动控制,从而提高生产效率。
另外,PLC还需要控制KUKA机器人的干涉区zone逻辑。机器人在操作过程中可能会遇到其他设备或物体,为了避免碰撞和损坏,我们需要将工作区域划分为不同的干涉区,并通过PLC来控制机器人在不同区域的移动和操作。
此外,PLC还可以控制KUKA机器人的程序段segment逻辑。通过对机器人程序的控制,我们可以实现各种复杂的运动和操作,以适应不同的工作要求。同时,PLC还可以控制SEW电机的变频运动程序,从而实现更高级的运动控制。
除了机器人本身,PLC还可以控制外围设备如夹具的动作。通过与外围设备的通讯,PLC可以实现对夹具的控制,确保工作过程中的准确性和稳定性。
在整个系统中,PLC提供了手动、自动、强制、空循环和多车型运行方式。这意味着我们可以根据不同的需求和工作流程来选择不同的运行模式,从而实现更灵活和高效的生产。
为了更加方便地操作和监控系统,我们可以配置触摸屏HMI,并在程序中加入详细的注释。这样,操作人员在使用系统时可以直观地了解系统的状态和控制流程,提高工作效率和准确性。
总的来说,西门子PLC配KUKA机器人程序的调试是一个重要且复杂的过程。通过合理配置和控制,PLC可以实现与KUKA机器人的通讯和控制,确保系统的安全性和稳定性。同时,通过对机器人的各种逻辑控制和外围设备的动作控制,PLC能够实现各种复杂的运动和操作,为汽车焊装等项目提供绝佳的参考案例。
相关的代码,程序地址如下:http://imgcs.cn/635393529758.html
















 1025
1025

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









