






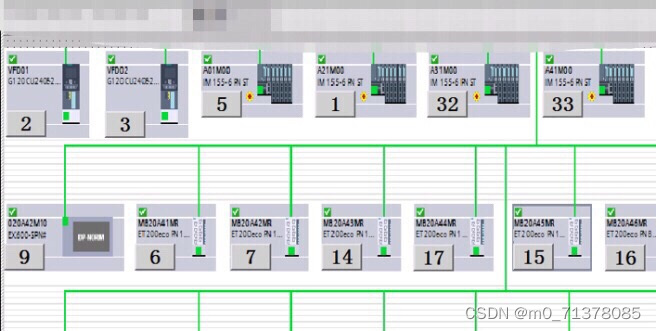
西门子PLC配KUKA机器人程序
程序为西门子S7-1500PLC博途调试:
西门子与KUKA机器人通讯;
PLC控制KUKA机器人安全回路,设备安全装置控制;
PLC与KUKA机器人信号交互,外部自动控制;
PLC控制KUKA机器人干涉区zone逻辑;
PLC控制KUKA机器人程序段segment逻辑;
PLC控制SEW电机变频运动程序;
PLC控制外围设备夹具动作;
PLC系统有手动/自动/强制/空循环/多车型运行方式;
配置触摸屏HMI,程序带详细注释等等。
项目为汽车焊装程序,工程大设备多程序复杂,是学习西门子PLC或调试项目绝佳参考案例
ID:6913 636264323343
636264323343















 3977
3977











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









