







算法参考文献:A System for Induction of Oblique Decision Trees
目录
1. 算法流程
 OC1 算法大部分情况下使用确定性爬山来确保计算精度,还使用了两种随机化来避免陷入局部最小值,通过限制随机选择超平面的数量减少运行时间。
OC1 算法大部分情况下使用确定性爬山来确保计算精度,还使用了两种随机化来避免陷入局部最小值,通过限制随机选择超平面的数量减少运行时间。
2. 扰动算法
OC1 算法对超平面的方向没有限制,然而,为了接近标准的决策树算法,超平面首先被设置为该结点上效果最好的轴平行平面(即单变量决策树做出的平面)。OC1 算法只有在斜平面优于单变量平面的情况下才进行。
通过扰动现在的超平面使它偏移来寻找可能的超平面,由于超平面的存在数量是指数级,无法简单的枚举,需要一定的手段来限制(如 确定性启发式搜索,模拟退火),OC1结合了这两个想法,使用启发式搜索直到它得到一个局部最小值,然后使用一个非确定性搜索步骤(不是模拟退火)来得到一个局部最小值。
假设算法输入样本集 T 的数量为 n ,样本的属性维度是 d ,一共有 k 个类别。 表示T中的第 j 个样本,
是样本类别。则决策树当前结点的超平面方程为:
将样本集 Tj 代入到上述公式中可以得到如下公式:
通过 的正负可以判断该样本是在超平面的上方还是下方,假定如果
意味着样本点在超平面 H 的上方,如果超平面 H 可以完美的划分训练集 T ,则所有的同一类的样本点代入上述公式后得到的
符号相同。
OC1 算法一次调整超平面 H 的一个系数,在每次调整中确定该系数的局部最优值,如在调整系数 中,只将
视作变量,将其他系数视作常量,因此
可以视作
的函数,也就是
如果假定样本点在超平面 H 的上方,可以得到:
如果对输入的样本点提前做好规范化处理,则 ,对样本集 T 中的所有点,有相同类的点在同一方向,所以将所有的样本点插入到上面公式,就可以得到 n 个关于
的约束方程。(比如假定样本
属于同一类且都在该超平面 H 的上方,则可得到两个约束
)
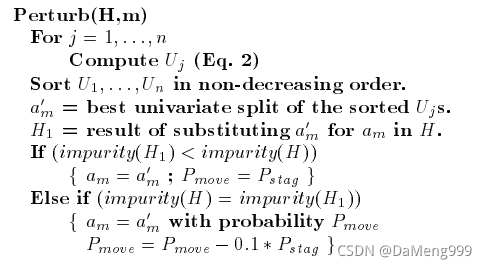
由此问题就转化为找到一个尽可能多的满足上述方程组的解。解决方案如下:对所有的 值排序,然后将
值设为每一对不同值的中点;设
是改变
后得到的新超平面,计算新超平面的不纯度,如果不纯度降低,则用它替换原有的超平面。如果两者拥有相同的不纯度,则以概率 P 代替原来的超平面。
算法流程如下:
现在已经阐述了超平面扰动的算法,接下来需要选定如何选择 d+1 个系数来扰动,有顺序、最佳和随机三种方式。
- 顺序:For i=1 to d, Perturb(H, i)
- 最佳:重复直到系数 m 没有修改。m=扰动过程中最大限度改善不纯度时的值,然后调用 Perturb(H, m)
- 随机:令 m 为随机值,重复一定次数,调用上述函数
系数选择方式不会对分类精确度产生较大的影响。
3. 随机化
当扰动算法达到局部最小时,算法停止。OC1 算法使用两种随机化方法跳出随即最小化。第一个方法是将超平面 H 移动一个随机向量,另一种是重新调用扰动算法并给出一个不同的初始超平面。
3.1 移动超平面
当系统陷入局部最小化时,它选择一个随机的向量并将该向量添加到当前超平面的系数之中,然后计算沿当前扰动方向的最佳超平面。具体的说是,OC1 算法重复以下步骤 J 次(J由用户决定):
- 选定一个随机的向量
- 令参数
作为我们想让超平面 H 在方向 R 上的移动量,也就是
- 找到最佳的参数
- 如果
可以降低划分的不纯度,则用它代替原有的超平面 H 并退出循环。否则重复 1
需要注意的是,参数 作为超平面
的唯一参数。对样本集 T 的 n 个样本,将所有样本插入到等式中,就可以对该参数添加 n 个约束方程,因此可以借用第一节中的方法确定参数值。如果 J 次循环后不纯度没有改善,则选用原有超平面来划分结点。
这种沿随机方向扰动超平面不会显著的增加算法的复杂度,并在实验中证明很有用。
3.2 重启
第二种避免局部极小值的技术是对执行多次局部搜索的思想的一种变体。由于算法大部分都是确定性的,所以最初超平面会对是否会陷入局部值有很大影响。在第一种方法失败后,通过简单的换用一个新的初始超平面并重新开始训练可能会有用,并用重启来命名该算法。
一个算法循环如下:一次扰动一个系数,然后当算法达到局部最小值时并得到该情况下的超平面后,尝试在一个随机方向扰动超平面。如果最后一次扰动降低了不纯度,就返回到一次扰动一个系数的环节。
重启的次数是人为设定的,在实验中会随着重启次数的增加,分类精确度会逐渐增加直至饱和(大概 20 ~50 次)
在结合爬山算法和随机化,OC1 确保最坏情况下的时间复杂度为 。
4. 其他
在数据符合某些分布下,轴平行分割就是结点划分的最佳方法,OC1 算法结合了轴平行划分和斜平面划分,即初始超平面设置为轴平行平面。计算轴平行平面仅多花费 的时间复杂度。

















 2582
2582

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









