









一、
1.配置RT-Thread Settings

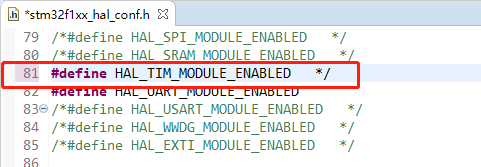
2.开启board.c和stm32f1xx_hal_conf.h的宏配置

3.用stm32cube配置TIM相关驱动内容
这里只使用了定时器基础的计数功能,只需要进行简单的配置即可。得到void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base)函数即可,放在board.c后面。
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base)
{
if(htim_base->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspInit 0 */
/* USER CODE END TIM3_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* USER CODE BEGIN TIM3_MspInit 1 */
/* USER CODE END TIM3_MspInit 1 */
}
}



4.使用RT接口函数配置相关内容
复制RT例程并初始化,更多接口函数查看RT官方资料RT官方资料

#define HWTIMER_DEV_NAME "timer3" /* 定时器名称 */
/* 定时器超时回调函数 */
static rt_err_t timeout_cb(rt_device_t dev, rt_size_t size)
{
rt_kprintf("this is hwtimer timeout callback fucntion!\n");
rt_kprintf("tick is :%d !\n", rt_tick_get());
return 0;
}
static int hwtimer_sample(void)
{
rt_err_t ret = RT_EOK;
rt_hwtimerval_t timeout_s; /* 定时器超时值 */
rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
rt_hwtimer_mode_t mode; /* 定时器模式 */
/* 查找定时器设备 */
hw_dev = rt_device_find(HWTIMER_DEV_NAME);
if (hw_dev == RT_NULL)
{
rt_kprintf("hwtimer sample run failed! can't find %s device!\n", HWTIMER_DEV_NAME);
return RT_ERROR;
}
/* 以读写方式打开设备 */
ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
if (ret != RT_EOK)
{
rt_kprintf("open %s device failed!\n", HWTIMER_DEV_NAME);
return ret;
}
/* 设置超时回调函数 */
rt_device_set_rx_indicate(hw_dev, timeout_cb);
/* 设置模式为周期性定时器 */
mode = HWTIMER_MODE_PERIOD;
ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
if (ret != RT_EOK)
{
rt_kprintf("set mode failed! ret is :%d\n", ret);
return ret;
}
/* 设置定时器超时值为5s并启动定时器 */
timeout_s.sec = 5; /* 秒 */
timeout_s.usec = 0; /* 微秒 */
if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
{
rt_kprintf("set timeout value failed\n");
return RT_ERROR;
}
/* 延时3500ms */
rt_thread_mdelay(3500);
/* 读取定时器当前值 */
rt_device_read(hw_dev, 0, &timeout_s, sizeof(timeout_s));
rt_kprintf("Read: Sec = %d, Usec = %d\n", timeout_s.sec, timeout_s.usec);
return ret;
}
















 913
913











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









