






十四自由度整车动力学模型(前轮转向)
适用场景:采用模块化建模方法,搭建14自由度整车模型,作为整车平台适用于多种工况场景。
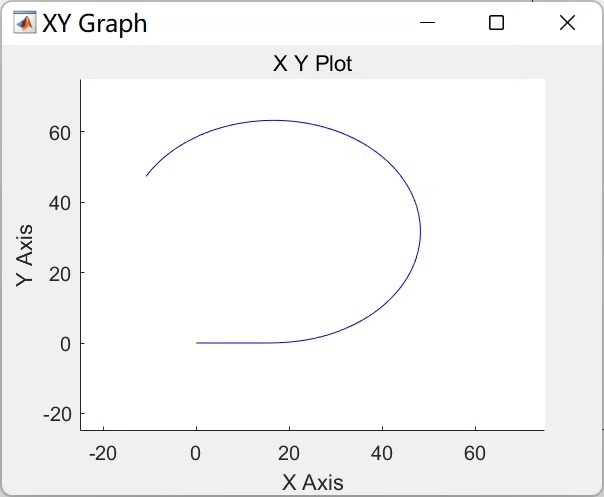
工况: 阶跃工况、正弦工况。
包含模块:转向系统,整车车身系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等。
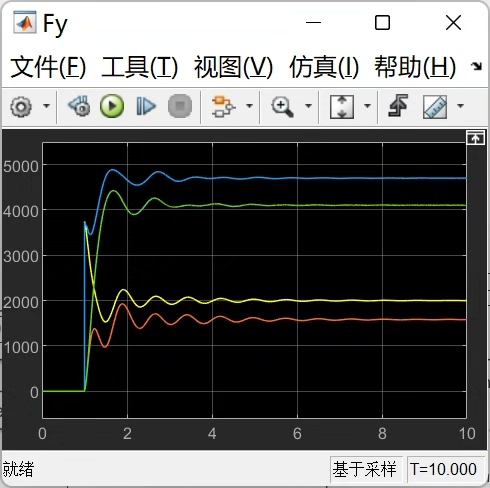
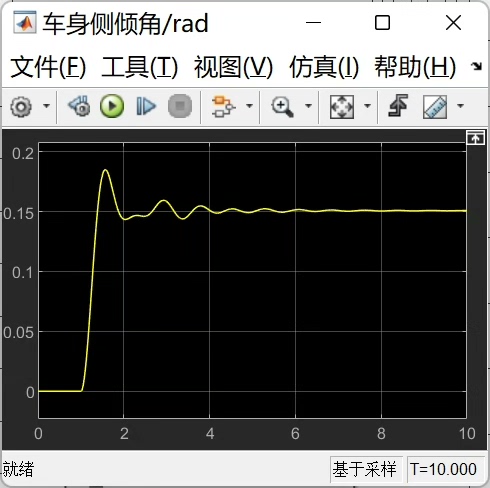
十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。
包含:Matlab/Simulink源码文件,详细建模说明文档,对应参考资料及相关文献
ID:78150753137697268
回忆的风
十四自由度整车动力学模型(前轮转向)
在无人驾驶车辆的开发过程中,对于整车的动力学模型建立至关重要。本文将围绕十四自由度整车动力学模型展开论述。作为一名多年从事Matlab Simulink等建模工作的专业人士,我对于无人驾驶车辆的多种控制算法有一定的涉略,从PID到滑膜,从LQR到MPC等控制方法、从单车控制到队列控制都有实践经验。
在整车动力学模型的建立过程中,我们采用了模块化建模方法,搭建了十四自由度的整车模型。这个模型是一个综合考虑纵向、横向、横摆、车身俯仰、侧倾、垂向跳动等多种因素的完整模型,能够适用于多种工况场景。我们考虑了阶跃工况和正弦工况两种常见的工况。
在这个整车模型中,我们包含了转向系统、整车车身系统、悬架系统、魔术轮胎、车轮系统、PI驾驶员控制模块等多个模块。这些模块共同协作,实现了整车各个自由度的准确模拟。在Simulink中,可以实时查看每个自由度的数据,方便进行实时监测和调试。
为了方便使用和学习,我们提供了Matlab Simulink源码文件、详细的建模说明文档,以及对应的参考资料和相关文献。这些资料和文献将帮助用户更好地理解整车动力学模型的建立原理和具体细节。此外,我们也提供了一定程度(3天)的售后支持,解答用户在使用过程中遇到的问题。
如果用户有定制需求,我们也可以提供具体的咨询服务。不过需要说明的是,由于定制模型的复杂性,定制价格较高。因此,我们建议用户尽量考虑已有的打包好的模型,这些模型在店铺内有较大优惠。
除了十四自由度整车动力学模型,我们的店铺内还有其他优惠的无人驾驶、车辆规划控制、队列控制等方向的现有模型。而且,我们将会陆续上架更多模型实例,敬请期待。
如果您对我们的模型感兴趣或者需要学习相关知识,欢迎与我联系。我们保证模型的运行完全正常,同时也可以提供文字服务或者远程辅导在线视频等额外的服务,具体的价格和交流方式可以另行商定。
通过本文,我们希望向广大无人驾驶爱好者和专业人士介绍了我们搭建的十四自由度整车动力学模型(前轮转向)。该模型具有高度可靠性和准确性,并且包含了多个模块,能够适应不同的工况场景。我们的目标是为用户提供高质量的模型和优质的售后服务,帮助他们更好地进行无人驾驶车辆的研发工作。谢谢!
以上相关代码,程序地址:http://fansik.cn/753137697268.html
















 502
502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









