






示教器的连接问题
Q1:示教器显示连接断开,该如何解决?
A1:原因:示教器与控制器之间断开连接,需要调整控制器来解决该问题。解决方法1:重启控制器;解决方法2:将控制器与PC相连并进行调试;
Q2:机器人出现飞车失控状况,怎么办?
A2:按下急停键,就是那个红色圆形按钮,周围有emergency stop 字样。解除方法:将圆形按钮旋转回来。
示教器的编程问题
Q1:示教器编程时无法让我添加点位进去,如何解决?
A1:报错信息是否为:添加点的数量已超过最大值?如果是的话,解决方法是在示教器屏幕上的虚拟界面中点选变量按钮,然后增加其中的点数量即可。
示教器的操作问题
Q1:如何让机器人回到零点位置?
A1:按示教器左侧的“零点”按钮,要区分零点与复位的区别,零点是要回到零点位置,复位是让机器人回到刚刚的状态。
Q2:出现报错::伺服控制模式未进行切换,如何解决?
A2:清错,再切换伺服状态。
Q3:出现报错:伺服不在运行状态,无法执行点动操作,如何解决?
A3:按住示教器后方的按钮,但不要用大力按到底,这样伺服就会从就绪状态变成运行状态,就可以执行点动操作了。
Q4:是不是每次运行完程序都要回到零点位置?
A4:不必,有需要的话也可以从当前位置开始。
Q5:在画圆操作中出现警告:点间距过小,不构成圆,如何解决?
A5:自己目前找的方法:在变量里自己定义点的位置来避免间距过小的情况。
Q6:出现报错:机器人的第5轴超过轴限,无法移动,怎么解决?
A6:针对这次的情况,先去查看了零点位置中第五轴目前的关节坐标,发现超过轴限的原因是机器人本身的5轴限制范围就在±20°,而此时第五轴的关节坐标在79°超过太多了,将第五轴的坐标改变之后就能解决,但是平时不要这么改(?)
Q7:为什么在运行完程序之后想改程序,却发现没法改?
A7:看看示教器的旋钮是否在“运行状态”,该状态下无法进行修改,解决方法是将示教器的旋钮旋转在“示教状态”就可以开始编辑了。
机器人相关
Q1:机器人的零点怎么对准?(怎么找机器人的零点位置)
A1:可以看到机器人身上有很多的定位孔,通过这些定位孔来找,具体方法:将定位孔的方位与机器人各个轴的方向进行对准,全部对准后机器人此时的姿态就是零点位置。
tips
1、有关门型运动:门型运动在搬运场景中使用较多,该运动中一般是以Z轴为基准进行门型运动,如图所示:
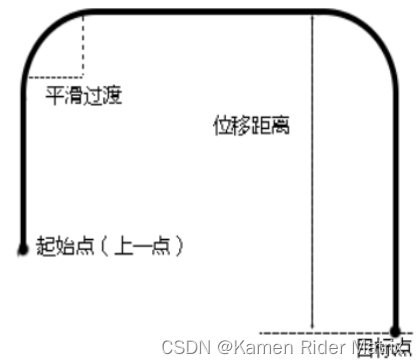
平滑过渡的圆弧段长度取决于位移距离与直线距离的大小,其差距越小,圆弧段的长度越小,本次运动越接近于矩形。
2、IO板一般与控制柜以串联形式连接,但是如果想要IO板传入外部的信号,需要给IO板电源与外部传过来的信号源,比如PLC等。
3、干涉区范围的意思是机器人不能涉足与加工的区域,打个比方,两个机器人进行弧焊操作,不想让它们加工中间的一段的话,中间的一段就是一个干涉区。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









