






 本文介绍了一种基于SIMULINK的双容水箱恒水位控制系统设计与仿真方法。利用PID控制算法,通过单回路及串级控制策略,实现了水位的有效控制,并通过MATLAB仿真确定了最优参数。
本文介绍了一种基于SIMULINK的双容水箱恒水位控制系统设计与仿真方法。利用PID控制算法,通过单回路及串级控制策略,实现了水位的有效控制,并通过MATLAB仿真确定了最优参数。
双容水箱恒水位控制系统,约8k字。
基于SIMULINK仿真环境,在假设双容水箱的数学建模后,采用PID控制算法,分别选用单回路控制系统和串级控制系统两种控制方案进行系统的分析设计。
通过MATLAB仿真并采用经验法对比例、积分、微分各参数进行整定,通过比较各阶跃响应曲线仿真图的超调量、调节时间等性能指标,确定了满意的控制参数。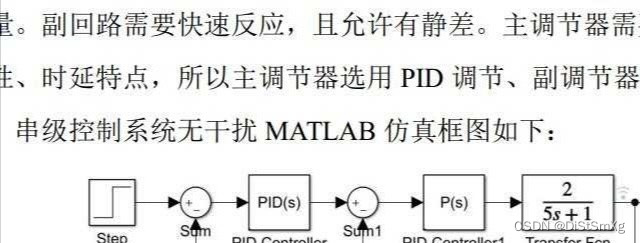
双容水箱恒水位控制系统的设计与仿真
近年来,随着现代工业的快速发展,传统的人工控制已经无法满足工业生产对自动化控制的要求。因此,智能控制系统得到了广泛应用。双容水箱恒水位控制系统作为一种重要的工业控制系统,其设计与实现对于提高工业生产效率具有重要意义。本文基于SIMULINK仿真环境,采用PID控制算法,分别选用单回路控制系统和串级控制系统两种控制方案进行系统的分析设计。
一、数学建模
双容水箱的数学建模是设计恒水位控制系统的关键。首先,我们需要确定控制对象。双容水箱恒水位控制系统中,水箱是控制对象,且双容水箱在一定的物理条件下可视为近似线性的系统。因此,我们可以采用一阶惯性环节模型来描述双容水箱。其次,我们需要确定控制量和被控量。在双容水箱恒水位控制系统中,水位高度是被控量,控制量为水箱进水量或出水量。最后,我们需要建立控制对象的数学模型,即根据系统的特性,分析出数学表达式。
二、单回路控制系统设计与仿真
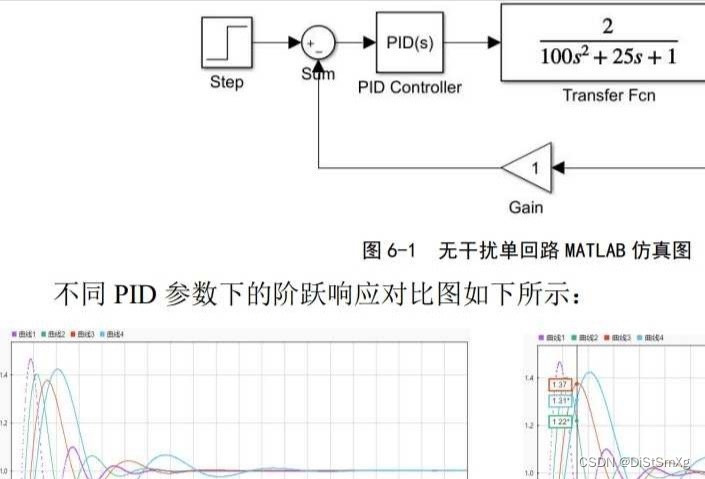
在单回路控制系统中,我们将控制对象的输出值作为反馈量,与设定的目标值进行比较,再将偏差值送入PID控制器进行处理,得到控制器输出量,对水箱进水或出水进行控制。PID控制器是一种经典的控制器,在控制系统中应用广泛。PID控制器的控制策略基于调节偏差的比例、积分和微分部分,以实现精确控制目标值。
在单回路控制系统中,我们需要对比例、积分、微分三个参数进行整定。通常,我们通过比较不同参数下的系统性能指标,如超调量和调节时间等,来确定最佳的控制参数。在本文中,我们通过MATLAB仿真平台对单回路控制系统进行仿真。仿真时,我们选定不同的比例、积分、微分参数,得到对应的系统反馈曲线和性能指标,并对比不同参数下的系统响应能力,以确定最佳的控制参数。
三、串级控制系统设计与仿真
串级控制系统是一种控制结构,它将一级控制器的输出作为二级控制器的输入,将控制过程分层,以实现更加精细和高效的控制。在双容水箱恒水位控制系统中,串级控制系统可以更好地解决控制系统中存在的滞后现象,提高系统的精度和稳定性。在串级控制系统中,我们将控制对象的输出值与设定的目标值进行比较,得到一级控制器的偏差量,再将该偏差量作为二级控制器的输出,对水箱进水或出水进行控制。
在串级控制系统中,我们同样需要对比例、积分、微分三个参数进行整定,以确定最佳的控制参数。通过MATLAB仿真平台对串级控制系统进行仿真,我们可以得到不同参数下的系统反馈曲线和性能指标,并通过比较不同参数下的系统响应能力,确定最佳的控制参数。与单回路控制系统相比,串级控制系统的性能指标更优,表现出更高的精度和稳定性。
四、总结
本文基于SIMULINK仿真环境,采用PID控制算法,分别设计了单回路控制系统和串级控制系统,对双容水箱恒水位控制系统进行仿真分析。通过MATLAB仿真平台对比例、积分、微分三个参数进行整定,确定最佳的控制参数。通过比较不同参数下的系统性能指标,表现出更高的精度和稳定性。本文的研究结果对于工业生产恒水位控制系统的设计与实现具有重要意义。
相关代码,程序地址:http://lanzouw.top/684703597010.html


















 2027
2027

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









