






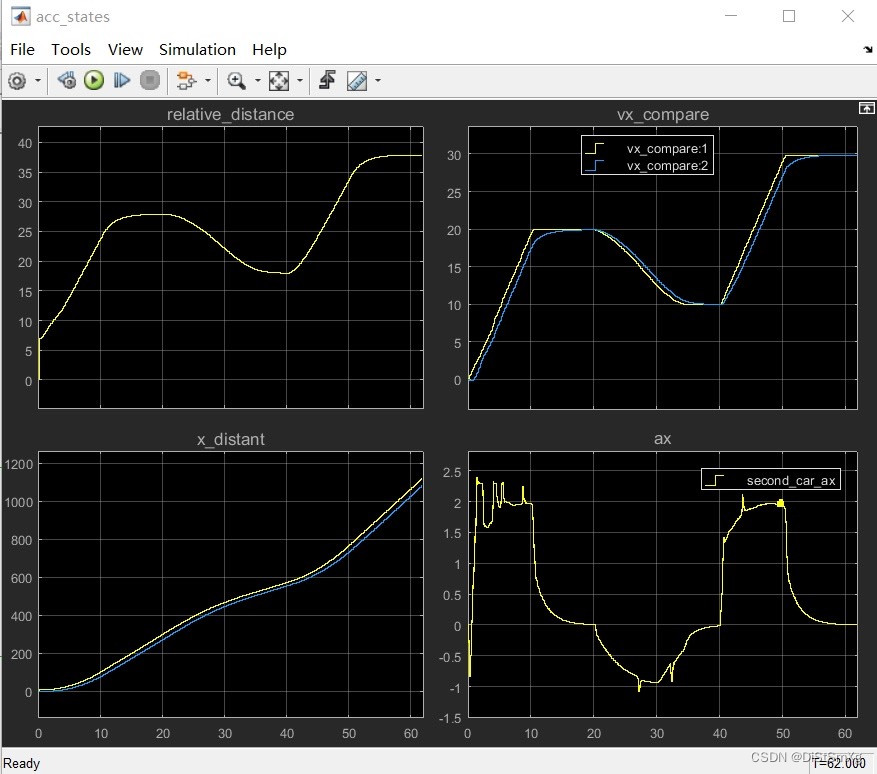
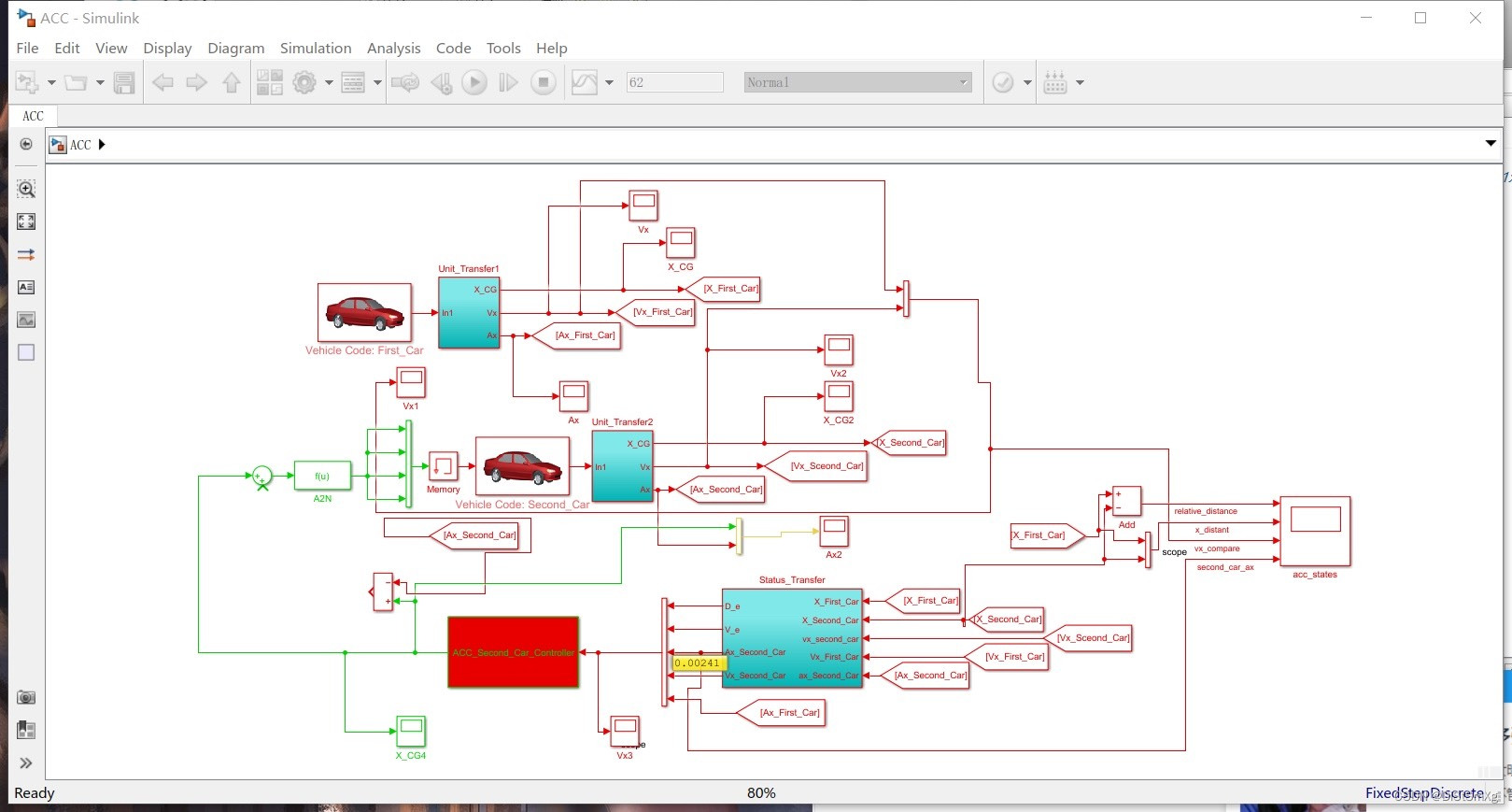
基于MPC的分布式电动汽车协同自适应巡航控制,采用上下分层控制方式,上层控制器采用模型预测控制mpc方式,产生期望的加速度,下层根据期望的加速度分配扭矩;仿真结果良好,能够实现前车在加减速情况下,规划期望的跟车距离,产生期望的加速度进行自适应巡航控制。
基于MPC的分布式电动汽车协同自适应巡航控制是当前研究的热点之一。该控制方法采用了上下分层控制方式,其中上层控制器采用模型预测控制MPC方式,下层根据期望的加速度分配扭矩。它的主要目的是实现前车在加减速情况下,规划期望的跟车距离,产生期望的加速度进行自适应巡航控制。
在该方法中,上层控制器主要负责产生期望的加速度,而下层控制器则根据期望的加速度进行扭矩分配。上下两层之间通过信号传输实现通信,从而实现协同控制。这种分层控制的方式可以提高控制的精度和稳定性,同时还能够减少通信的负荷,提高系统的实时性。
MPC是一种优秀的控制方式,它能够通过对车辆运动的预测,实现更加精确的控制。在MPC中,通过建立数学模型,预测未来的状态,并根据预测结果产生期望的控制量。在本方法中,MPC主要用于上层控制器,它能够产生期望的加速度,从而实现自适应巡航控制。
在仿真结果中,基于MPC的分布式电动汽车协同自适应巡航控制表现良好。它能够实现前车在加减速情况下,规划期望的跟车距离,产生期望的加速度进行自适应巡航控制。此外,该控制方法还能够实现分布式控制,减少通信负荷,提高控制精度和稳定性。
最后,基于MPC的分布式电动汽车协同自适应巡航控制是一种优秀的控制方法。它采用上下分层控制方式,上层控制器采用模型预测控制MPC方式,产生期望的加速度,下层根据期望的加速度分配扭矩。该方法具有控制精度高、稳定性好、通信负荷小等特点,是未来汽车控制领域中的重要研究方向之一。
相关代码,程序地址:http://lanzouw.top/686075927975.html















 9681
9681











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









