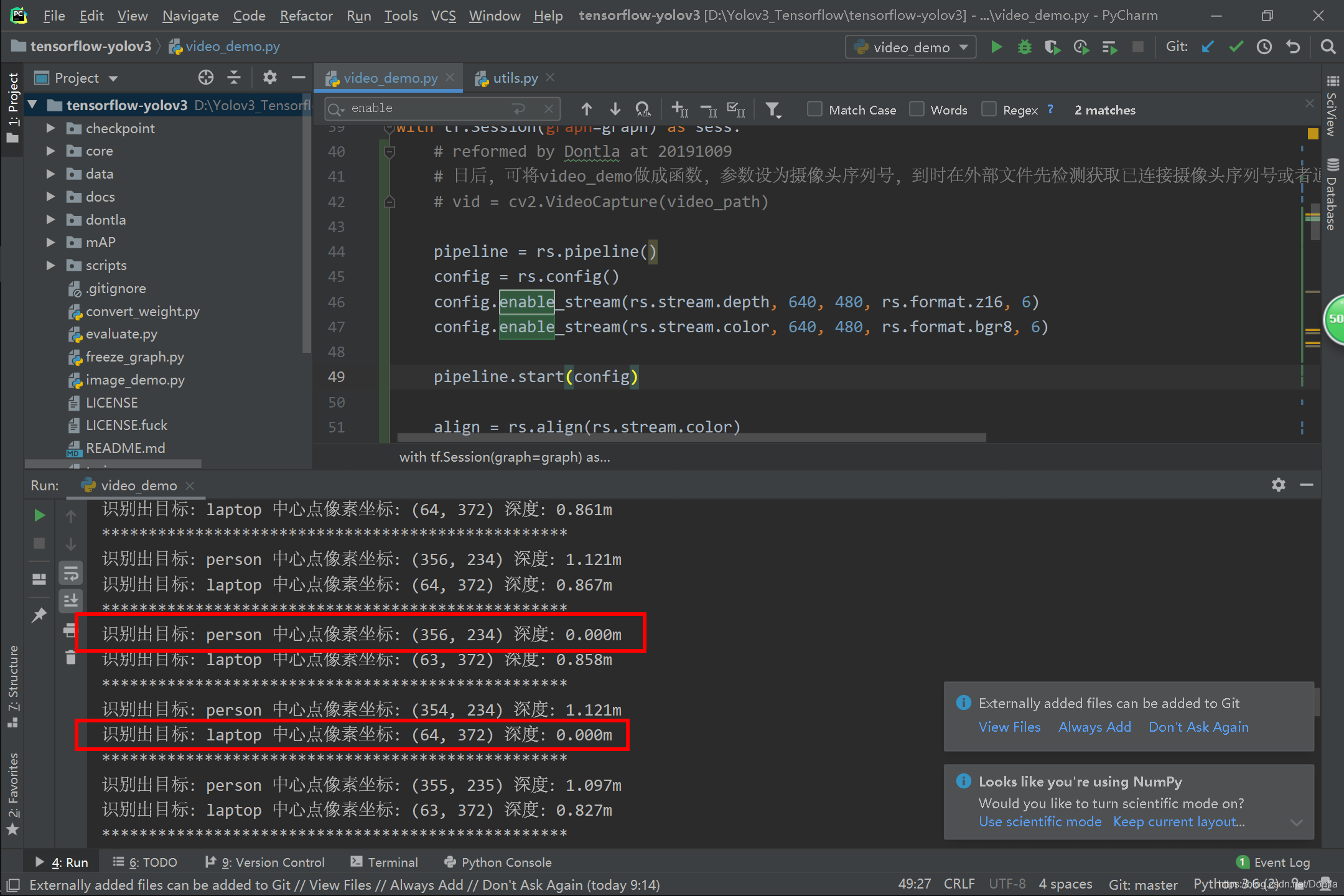
20191017 获取深度有时或遇到黑洞,或者取值不准直接“贯穿”,导致深度直接扩大、缩小(小概率)或直接为0(当出现黑洞或深度超出可监测范围时就为0),今后可使用如下算法:检测目标像素周围一特定范围区域,若遇到比目标像素点深度小的,则以新的小的深度作为目标像素点的深度。此方法猜测有一定风险(目标点周边目标有较大概率深度小于目标点)。还有一种方法就是,将目标点周围的目标都检测出来,通过判断周边目标的类型,来对目标点的实际深度进行取舍判断。


























 7620
7620

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








