






作者:岁聿云暮
前言
这篇是自制机械臂项目的运行姿态优化。想尝试做一个机械臂的可以参考这篇文章: 《如何做个机械臂》。
尝试使用MarsCode来辅助编程,挺好用的,能提升效率。
缘由
目前机械臂只会固定某个速度从开始位置旋转到目标位置,看起来多少有点僵硬。故想着如何让机械臂运行起来更加自然,举个例子,可以想象一下扇扇子的动作,慢 -> 快 -> 慢。那如何解决这个问题,我第一时间想到的是贝塞尔曲线。就像css的css的缓动函数。
目标
机械臂能变速旋转。
先看结果
解决过程
由于小米电机的几种控制模式都不支持变速运动。只能从网页端(上位机)层面或单片机层面来做,将原来的匀速距离旋转切分成多段的匀速运动,有点微积分的味道。写c语言有点太累,所以就从网页端来做,理论上蓝牙的传输速率比can快,所以在网页端来做完全没问题。但是,多了一步操作,系统可靠性会降低些。
尝试让豆包MarsCode生成想要的三阶贝塞尔曲线函数:
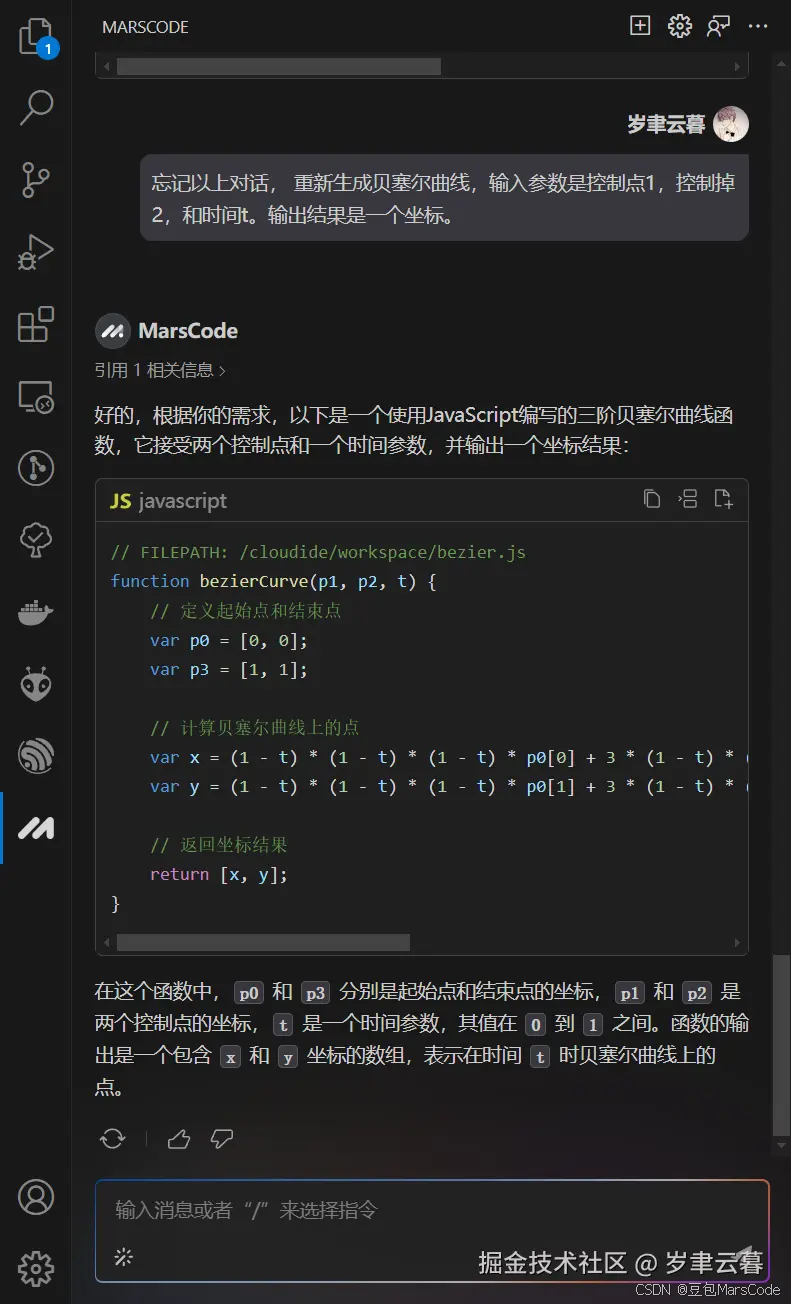
很完美,写个渲染贝塞尔曲线图的函数,将同等间隔的一百个点渲染到canvas上:
export function drawBezierCurve(p1, p2) {
// cubic-bezier(.17,.67,.83,.67)
p1 = [.17,.67];
p2 = [.83,.67];
// 创建canvas元素
var canvas = document.createElement("canvas");
canvas.id = "myCanvas";
canvas.width = 500;
canvas.height = 500;
canvas.style.backgroundColor = "black";
canvas.style.border = "1px solid #FFF";
canvas.style.position = "absolute";
canvas.style.left = "0";
canvas.style.top = "0";
let body = document.querySelector("body");
body.appendChild(canvas);
var ctx = canvas.getContext("2d");
for(let i = 0; i <= 100; i++ ){
let coordinate = bezierCurve(p1, p2, i / 100);
// console.log('coordinate: ', coordinate);
drawPoint(coordinate[0] * 500, (1 - coordinate[1]) * 500 , ctx);
}
function drawPoint(x, y, ctx) {
// 绘制背景为白色的圆
ctx.beginPath();
ctx.arc(x, y, 2, 0, 2 * Math.PI);
ctx.fillStyle = "white";
ctx.fill();
ctx.closePath();
}
}canvas渲染 如下图:
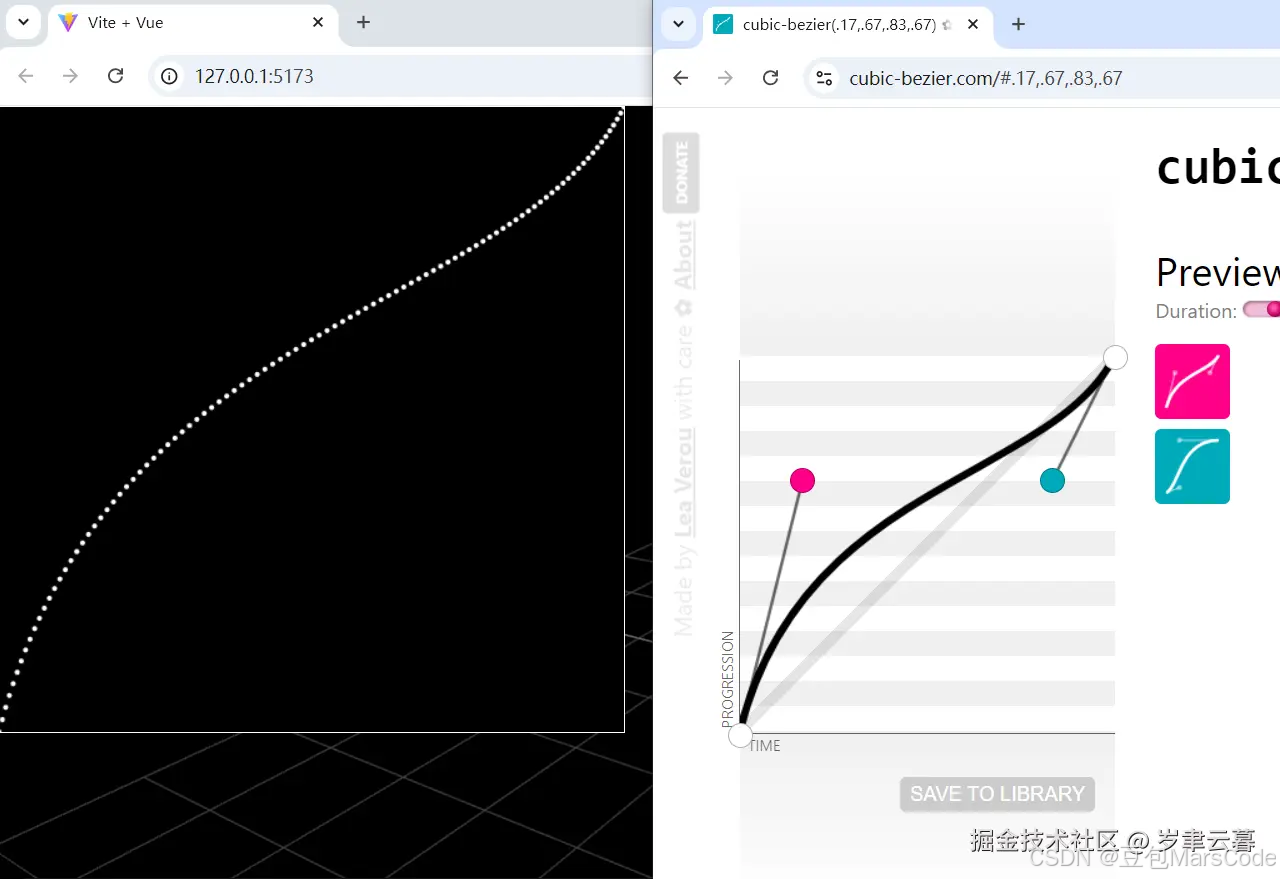
到此我有个疑问,为什么按时间等分计算,但渲染到图里的点却并不是等分。查询了些文档,比如这篇如何理解并应用贝塞尔曲线 (上图ai中也给了解答:在时间t时贝塞尔曲线上的点),在此我的理解是:这个函数只是计算出贝塞尔曲线的离散点,这个点代表了具体某个时间(x轴),应当要运动到路程的百分之几(y轴)。
实际验证:
为了简化问题,下面渲染个只有10个点的的贝塞尔曲线图(cubic-bezier(.17,.67,.83,.67)):
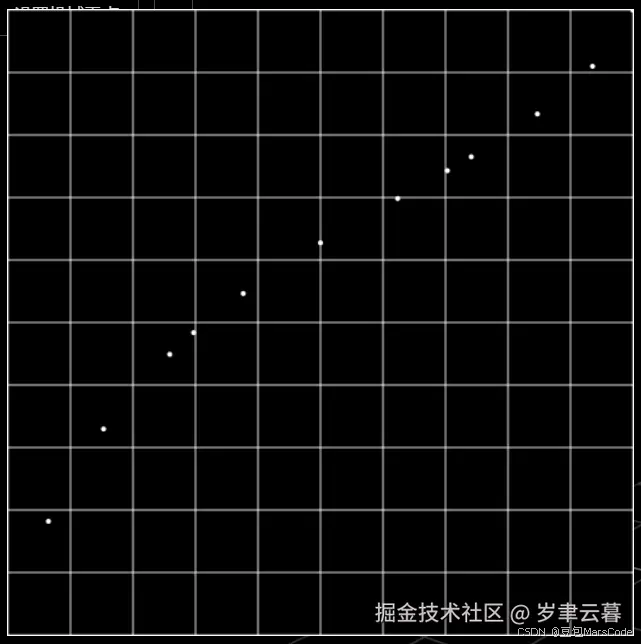
x轴是时间,y轴代表进度。那么可以明确以下观点:
① 不管前面如何运动,只要运行到最后一个点,那么就是运动到终点,即目标位置。
② 区间运动的速度等于 区间的运动距离 / 区间的运动时间,即 v = (y1 - y0) / (x1 - x0) = Δy / Δx
在此还需考虑一些实际问题,比如我设置的蓝牙传输间隔时间为15ms,can消息发送频率等。因为过快的发送蓝牙消息可能会导致消息阻塞,从而影响电机旋转的准确性。
粗略计算一下电机每秒的速度可变化的次数: 三个电机同时运行,电机每次的位置模式需要发四条指令。每秒可以发送蓝牙消息数量: 1000ms / 15ms(蓝牙间隔) = 66条指令。每秒速度的可变次数: 66 / (3 * 4) ≈ 5次。如果之后还要加电机,速度的每秒可变次数会更少。当然可以优化代码,比如将四条指令塞到一条蓝牙消息中(这个等之后做关键帧动画时再优化)。
造轮子时刻:
/**
* @description: 获取贝塞尔曲线的状态数据列表
* @param { Array<number> } p1 e.g: [0, 0]
* @param { Array<number> } p2 e.g: [1, 1]
* @param { number } count 坐标点的个数
* @returns { Array<object> } e.g: [{speed: 0.5, rotate: 0.5, duration: 0.5}]
*/
function getCubicCoords(p1, p2, count) {
let preCoord = [0, 0];
let cubicCoordData = [];
for (let i = 1; i <= count; i++) {
let t = i / count;
let coordinate = bezierCurve(p1, p2, t);
// drawPoint(coordinate[0] * 500, (1 - coordinate[1]) * 500, ctx);
cubicCoordData.push({
speed: (coordinate[1] - preCoord[1]) / (coordinate[0] - preCoord[0]),
rotate: coordinate[1],
duration: preCoord[0],
});
preCoord = coordinate;
}
return cubicCoordData;
}getCubicCoords函数得到的是所有离散点所处位置时的速度,旋转角度和经历时间,但这只是百分比,具体还要乘以具体的角度和时间,并生成指令通过蓝牙发送出去:
/**
* @description 获取一个贝塞尔曲线区间的指令列表,包含 旋转角度,延迟时间,速度
* @param { object {p1: Array<number>, p2: Array<number>} } cubicBezier
* @param { number } rotateDeg
* @param { number } deration
* @param { motorId } debugger
* @param { function } sendBleMsg
*/
// export function getCmdSeries(cubicBezier = {p1: [.9,.13], p2: [.88,.28]}, rotateDeg, duration, motorId = 21, sendBleMsg) {
export function getCmdSeries({
cubicBezier= { p1: [0.9, 0.13], p2: [0.88, 0.28]},
rotateDeg,
duration,
motorId,
sendBleMsg,
baseRotate = 0, // 从某个角度开始
}) {
let cubicCoordData = getCubicCoordsState(cubicBezier.p1, cubicBezier.p2, 3);
let avgSpeed = rotateDeg / duration;
cubicCoordData.forEach(item => {
let speed = item.speed * avgSpeed;
let time = item.duration * duration;
let rotate = item.rotate * rotateDeg;
setTimeout(() => {
console.warn('---speed: ', speed, '---duration: ', time, '---rotate: ', rotate);
sendBleMsg({ motorId: motorId, limit_spd: speed, loc_ref: baseRotate + rotate });
}, time * 1000);
});
}调用下函数,测试两秒钟机械臂旋转一周的表现:
getCmdSeries({
cubicBezier: {p1: [.17,.67], p2: [.83,.67]},
rotateDeg: 360,
duration: 3,
motorId: 23,
sendBleMsg: rotateMotor,
baseRotate: 0, // 从某个角度开始
});结果如下:
待优化问题
速度切换时会有卡顿的感觉,就是一个区间的速度降到零,然后再提升到下一个区间的速度。理想的速度切换应该是平滑的。

















 890
890

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









