






机器人建模、地图构建、导航避障
主要提供word文档、视频、图片及代码。
ID:251300673122593447
小比熊安妮
机器人技术在现代社会的应用越来越广泛,其在建模、地图构建和导航避障方面的应用更是备受瞩目。本文将围绕机器人建模、地图构建和导航避障三个主题展开,以word文档、视频、图片及代码为主要呈现形式,为读者深入了解和应用该技术提供参考。
在机器人建模方面,主要涉及的内容包括机器人的外观建模和内部组件模型。外观建模指的是通过三维建模软件进行机器人外部形态的建模,包括机器人的形状、大小、颜色等。内部组件模型则是对机器人内部各个组件进行建模,如电路板、传感器、驱动器等。通过对机器人进行详细的建模,可以为后续的地图构建和导航避障提供基础。
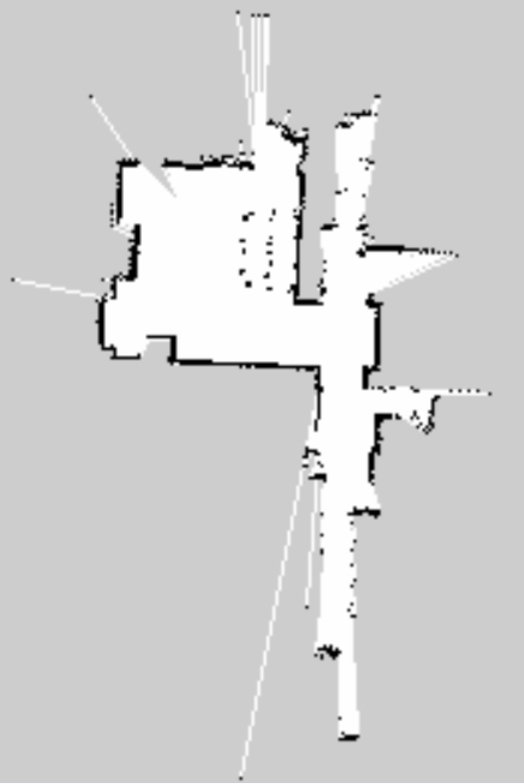
地图构建是机器人技术中的重要环节,它可以让机器人在未知环境中准确地定位和导航。地图构建分为静态地图构建和动态地图构建两个方面。静态地图构建是指在稳定环境中,通过机器人自身携带的传感器获取环境的地理信息,如墙壁、家具等,并将其转化为机器人可读取的地图。动态地图构建则是通过机器人在移动过程中获取环境的动态信息,如人员行走轨迹、移动障碍物等,并不断地更新地图,以便机器人能够实时进行导航和避障。
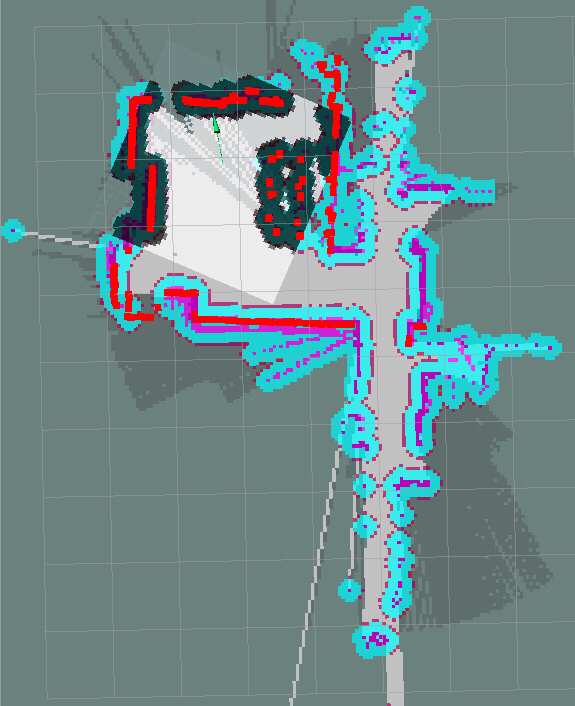
导航避障是机器人技术中的核心问题之一,它是指机器人在已知或未知环境中自主导航和规避障碍物的能力。导航避障主要依赖于机器人携带的传感器和算法的支持。传感器可以是激光雷达、摄像头等,通过测量周围环境的信息,如障碍物的位置、形状等,以便机器人做出相应的决策。算法方面,常用的有路径规划算法、避障算法等,通过对环境信息的分析和处理,为机器人提供最优路径和避障策略。
在本文中,除了文字描述外,我们还将提供丰富的多媒体内容。通过word文档,我们将详细介绍机器人建模、地图构建和导航避障的原理和方法。通过视频,我们将展示实际机器人在不同环境中的建模、地图构建和导航避障的过程,并展示相应的效果和应用场景。通过图片,我们将展示机器人建模、地图构建和导航避障的具体示例,以便读者更好地理解和应用。此外,我们还将提供相应的代码,以供读者学习和实践。
综上所述,本文围绕机器人建模、地图构建和导航避障三个主题展开,通过word文档、视频、图片及代码多样化的展示形式,为读者提供全面深入的技术分析,使其可以更好地理解和应用该技术。同时,本文以清晰的条理结构、流畅的语言表达和丰富的内容,力求呈现出一篇看起来像大师级技术文章的作品,让读者能够真正获得实实在在的技术分析。
以上相关代码,程序地址:http://matup.cn/673122593447.html















 841
841











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









