






No.789 基于S7-200 PLC和组态王组态焊接机器人控制系
带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
ID:1359674243451566

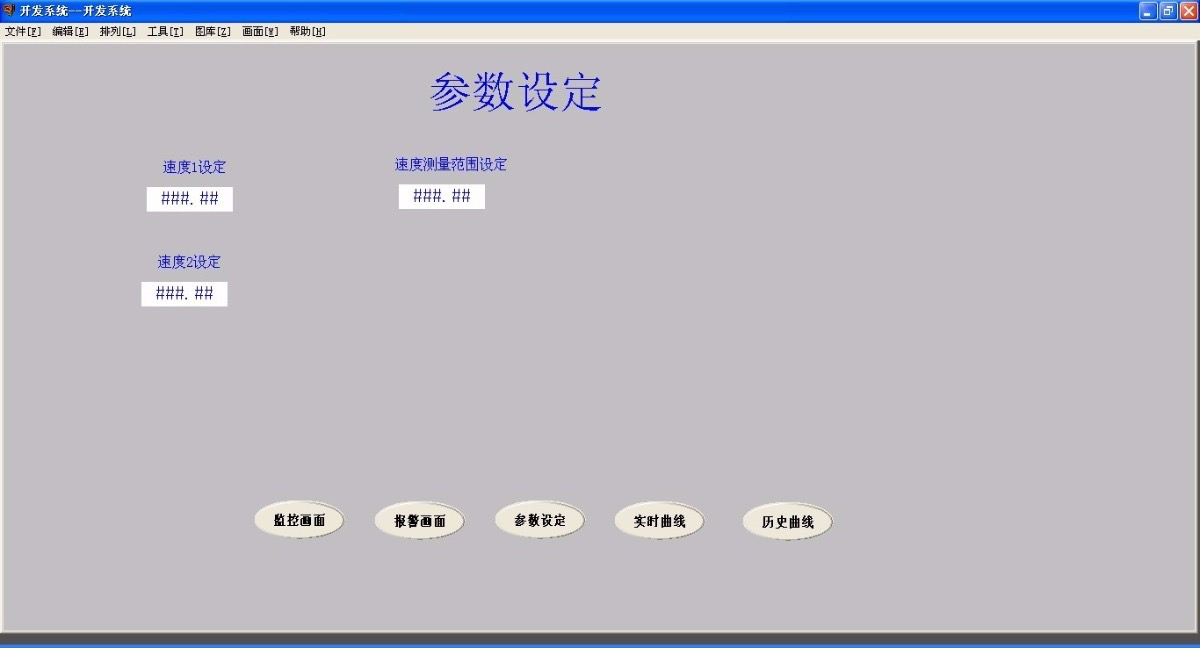
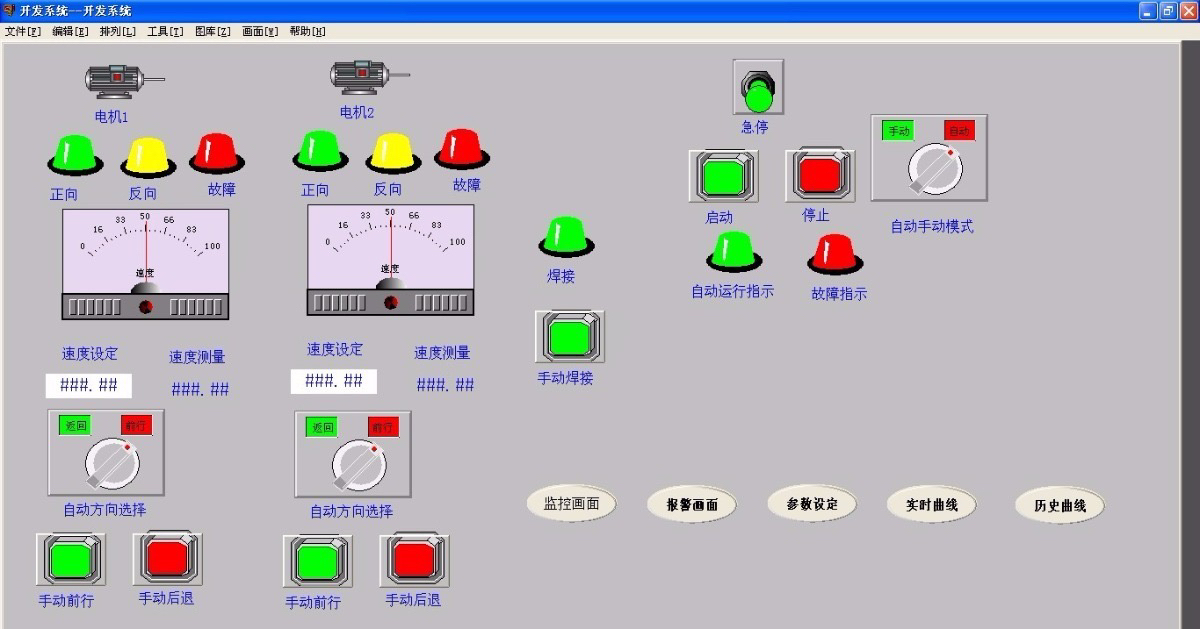
本文将围绕梯形图程序、接线图原理图、图纸、IO分配和组态画面展开,以探讨基于S7-200 PLC和组态王组态焊接机器人控制系统的相关技术。首先,我们将介绍S7-200 PLC和组态王组态焊接机器人控制系统的基本概念和特点,然后详细讲解梯形图程序的设计原理和实现方法,并给出相应的解释和示例。接着,我们将深入探讨接线图原理图和图纸的编制原则和技巧,以及IO分配的注意事项和步骤。最后,我们将介绍组态画面的设计思路和实现技术,包括界面布局、控件选择和交互逻辑等方面的要点。通过本文的阐述,读者可以全面了解基于S7-200 PLC和组态王组态焊接机器人控制系统的相关技术,并在实践中灵活运用和进一步拓展。
以上相关代码,程序地址:http://wekup.cn/674243451566.html















 6145
6145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









