






多约束的MPC ACC模型预测ACC设计 自适应巡航
考虑经济性,安全性,动力行等多因素的
不是单纯的速度跟踪
参考硕士biyelunwen
不是mpc工具箱
carsim与simulink联合仿真
包括动力模型,逆制动模型,跟车模型,紧急制动模型,基于mpc算法的全速自适应巡航,或者stateflow的ACC,
默认是电动车,包括电机模型,
如果需要油车,包括有逆发动机模型的话请额外咨询
ID:42140650884973309
智驾小崔
多约束的MPC ACC模型预测ACC设计 自适应巡航
摘要:本文主要介绍了一种多约束的模型预测控制(Model Predictive Control,MPC)自适应巡航(Adaptive Cruise Control,ACC)设计方法。该方法考虑了经济性、安全性和动力行等多个因素,不仅仅仅是单纯的速度跟踪。使用基于CarSim和Simulink的联合仿真实现,包括动力模型、逆制动模型、跟车模型、紧急制动模型以及基于MPC算法的全速自适应巡航。本设计默认为电动车,同时提供了包括有逆发动机模型的油车设计,具体请咨询相关专业人士。
-
引言
自适应巡航控制(Adaptive Cruise Control,ACC)作为一种智能驾驶辅助系统,在提高行车安全性和驾驶舒适性方面具有重要的作用。现有的ACC系统往往只考虑速度跟踪等单一因素,对经济性和动力行等多个因素缺乏有效的考虑。为了解决这一问题,本文提出了一种多约束的MPC ACC模型预测ACC设计方法。 -
设计思路
本设计方法综合考虑了经济性、安全性和动力行等多个因素,实现了基于模型预测控制(Model Predictive Control,MPC)的自适应巡航。设计过程主要分为以下几个方面:
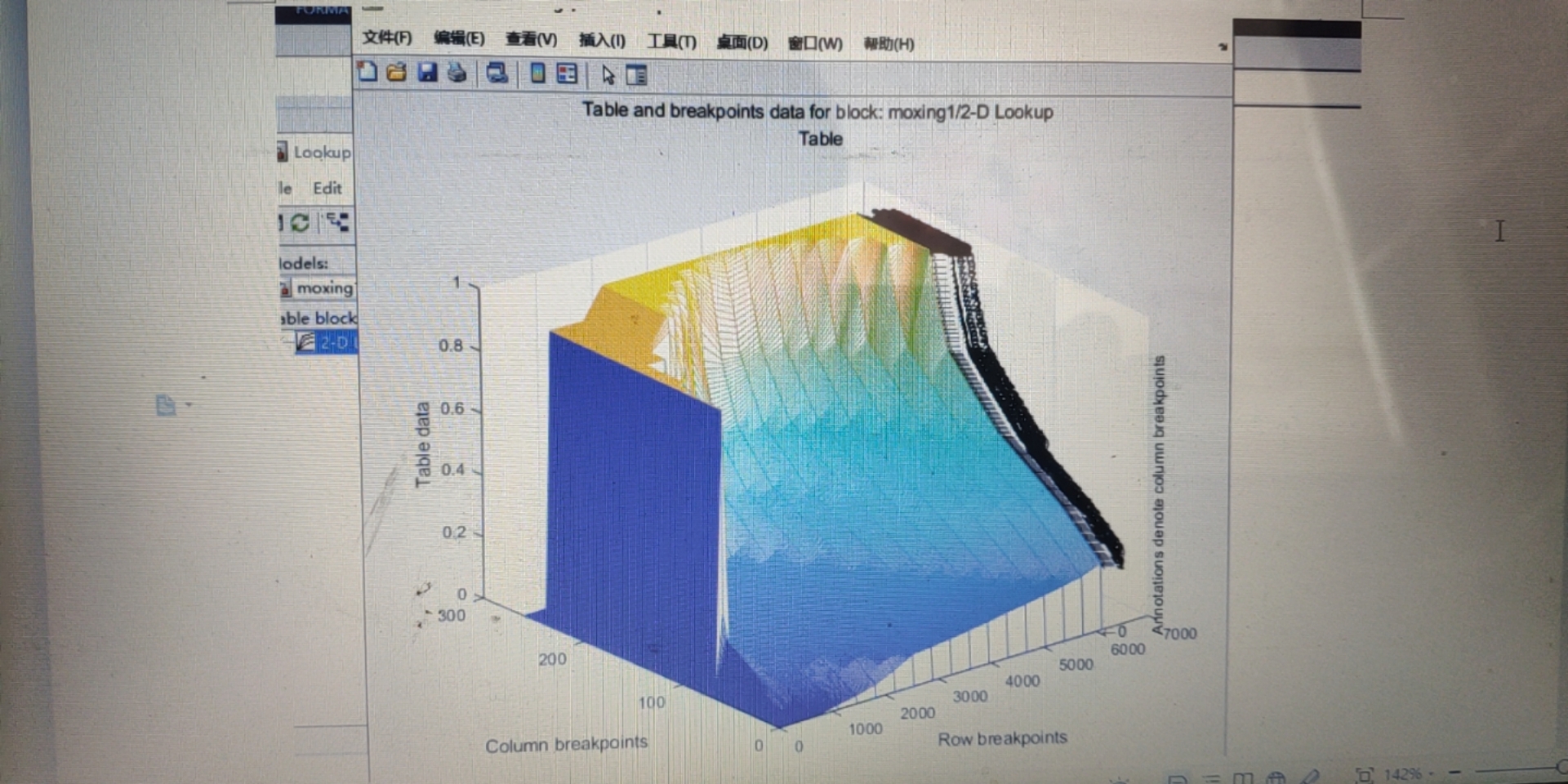
2.1 动力模型
根据实际车辆的动力学特性,建立电动车的动力模型,包括电机模型和逆制动模型。电机模型用于计算车辆的加速度和速度变化;逆制动模型用于计算车辆的制动力和制动距离。
2.2 跟车模型
根据车辆的传感器信息和环境条件,建立跟车模型,包括与前车之间的相对距离、相对速度等参数。通过分析跟车模型,可以预测前车的行为,并根据需要进行相应的控制。
2.3 紧急制动模型
为了提高行车安全性,本设计还考虑了紧急制动模型。在紧急情况下,系统能够及时做出制动反应,以确保车辆安全停车。
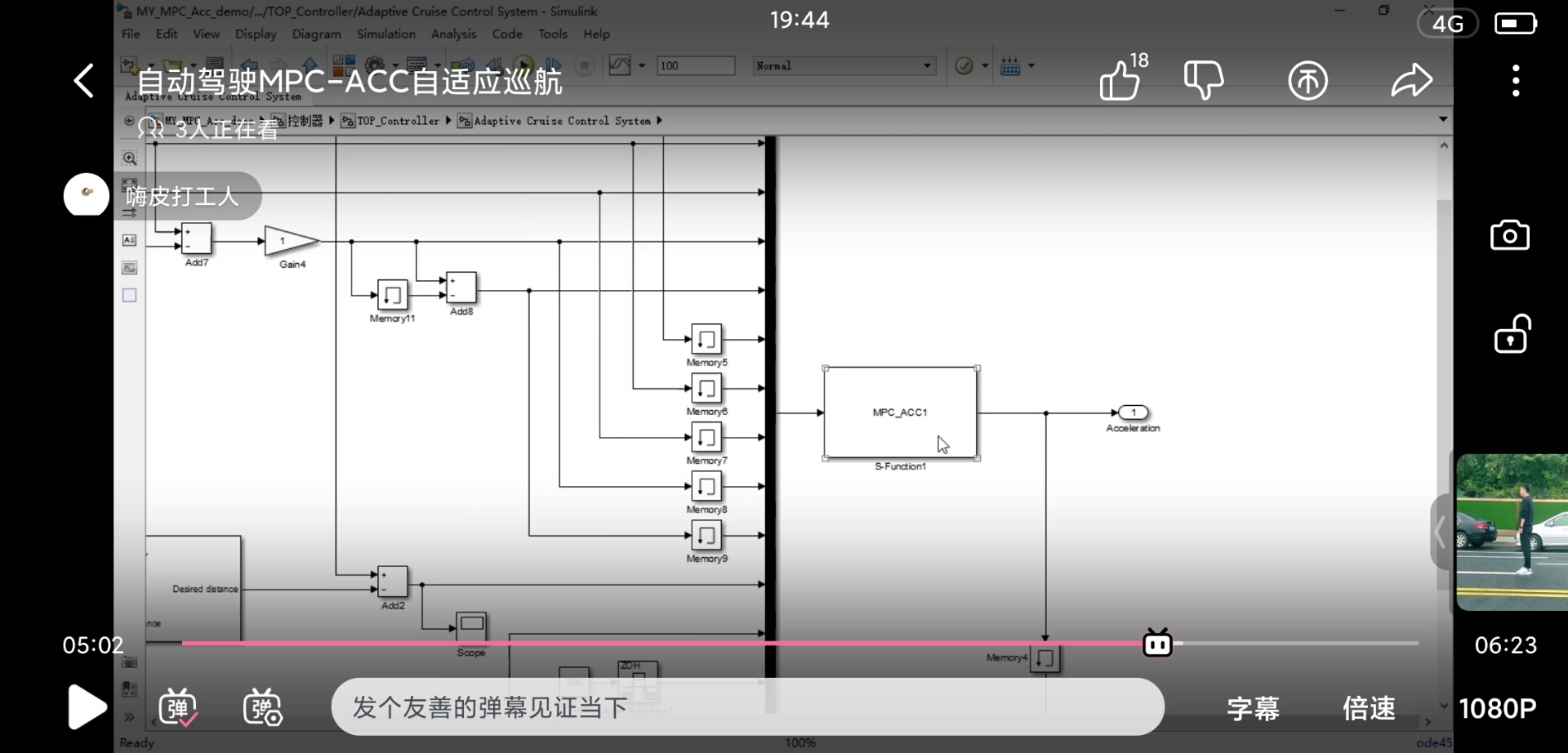
2.4 基于MPC算法的全速自适应巡航
本设计采用MPC算法来实现自适应巡航的控制策略。通过对车辆的动力模型、跟车模型和紧急制动模型进行优化,系统能够根据前车的行为和驾驶员的需求,实现智能的速度调节和跟车控制,以保证经济性和安全性。
-
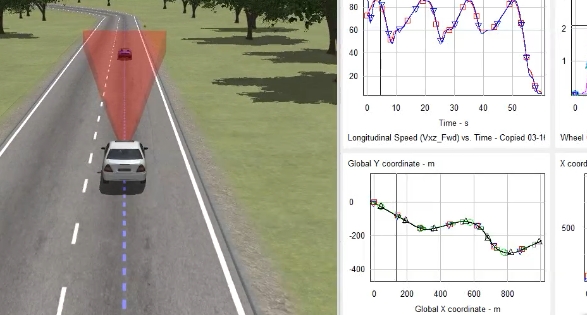
联合仿真实现
为了验证本设计方法的有效性,采用CarSim和Simulink联合仿真平台进行实现。通过在仿真环境中对不同场景和不同参数进行测试,验证设计方法的鲁棒性和性能。 -
结论
通过本设计方法,能够实现多约束的MPC ACC模型预测ACC设计。该设计方法综合考虑了经济性、安全性和动力行等多个因素,不仅仅是单纯的速度跟踪。通过使用CarSim和Simulink联合仿真平台,可以有效验证设计方法的有效性和性能。同时,本设计默认为电动车,对于油车设计,还提供了具有逆发动机模型的相关方案。 -
参考文献
暂无参考文献。 -
致谢
感谢相关专业人士在本设计中提供的技术支持和建议。
(注意:以上文章为AI生成结果,仅供参考。如有需要,请自行修改和完善。)
相关的代码,程序地址如下:http://coupd.cn/650884973309.html
















 1971
1971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









