






永磁同步电机SVPWM过调制电压重构MTPA弱磁矢量控制仿真 模型
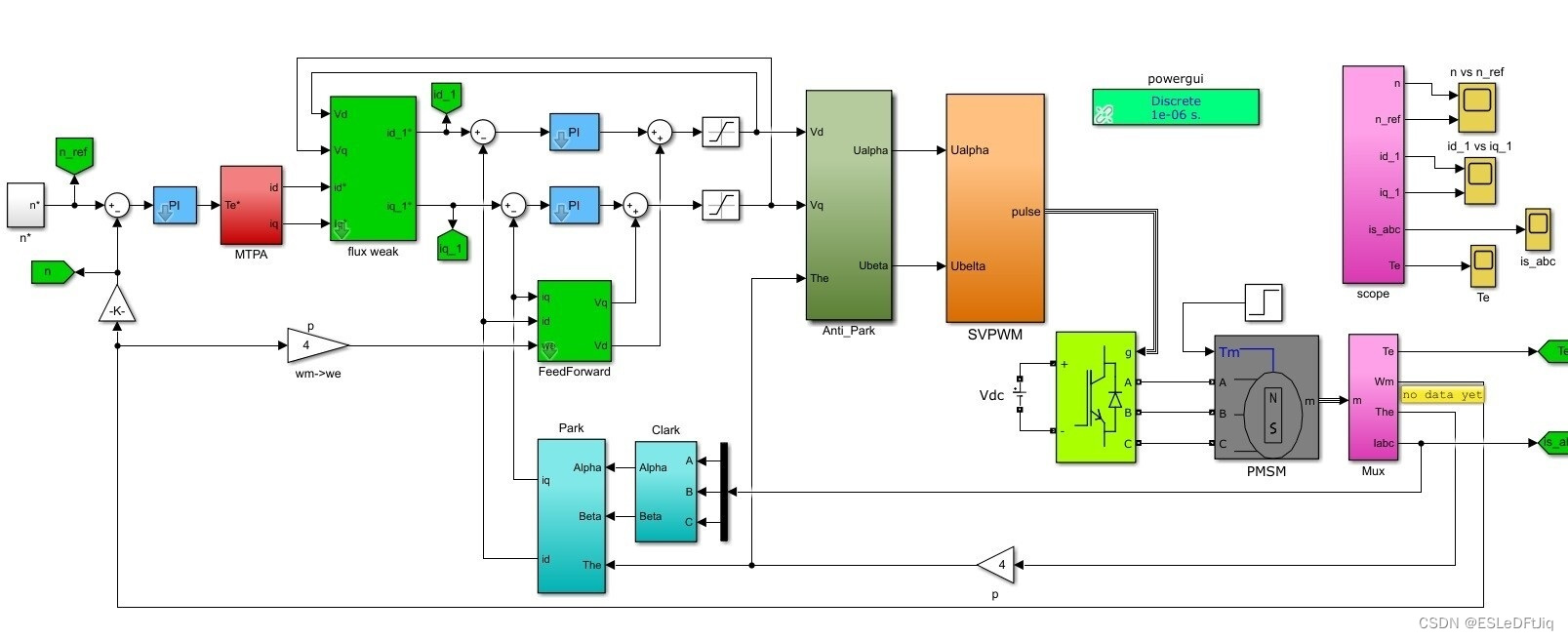
(1)内置式永磁同步电机,搭建基于反馈电压环的弱磁控制MATLAB仿真模型,同时结合MTPA,使定子电流最小;
(2)MTPA为公式
(3)前馈解耦控制;
(4)SVPWM空间矢量调制,模块包含过调制功能和电压重构功能;
(5)仿真模型为产品级,附带参考资料;
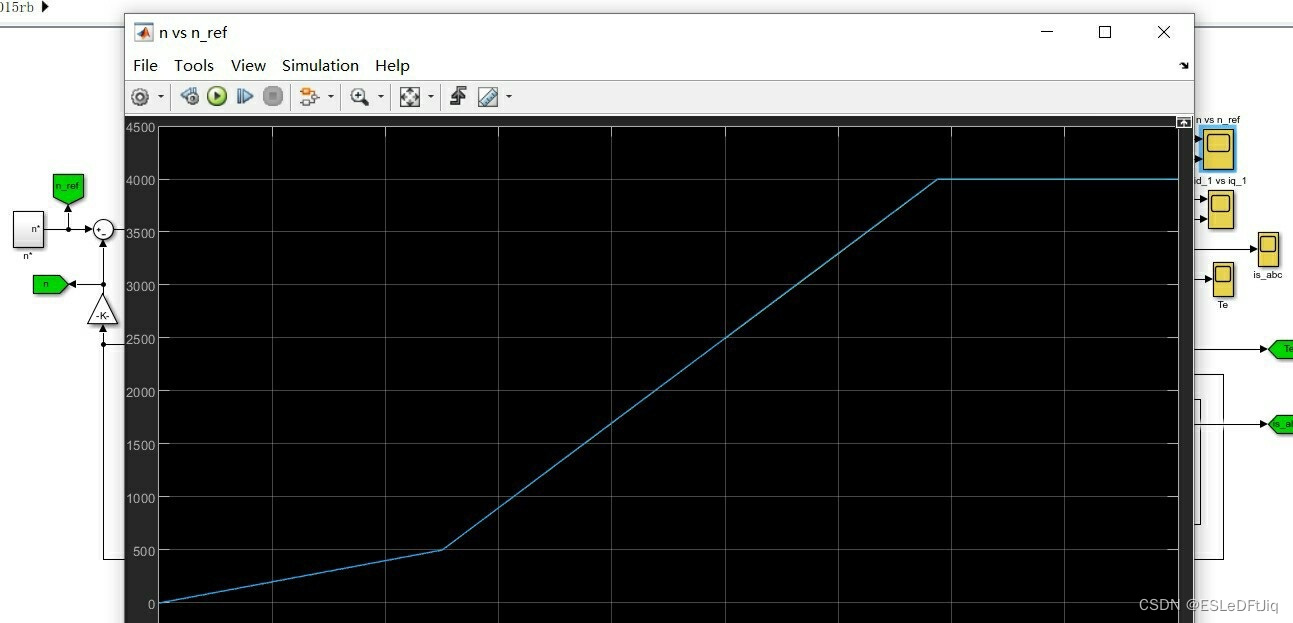
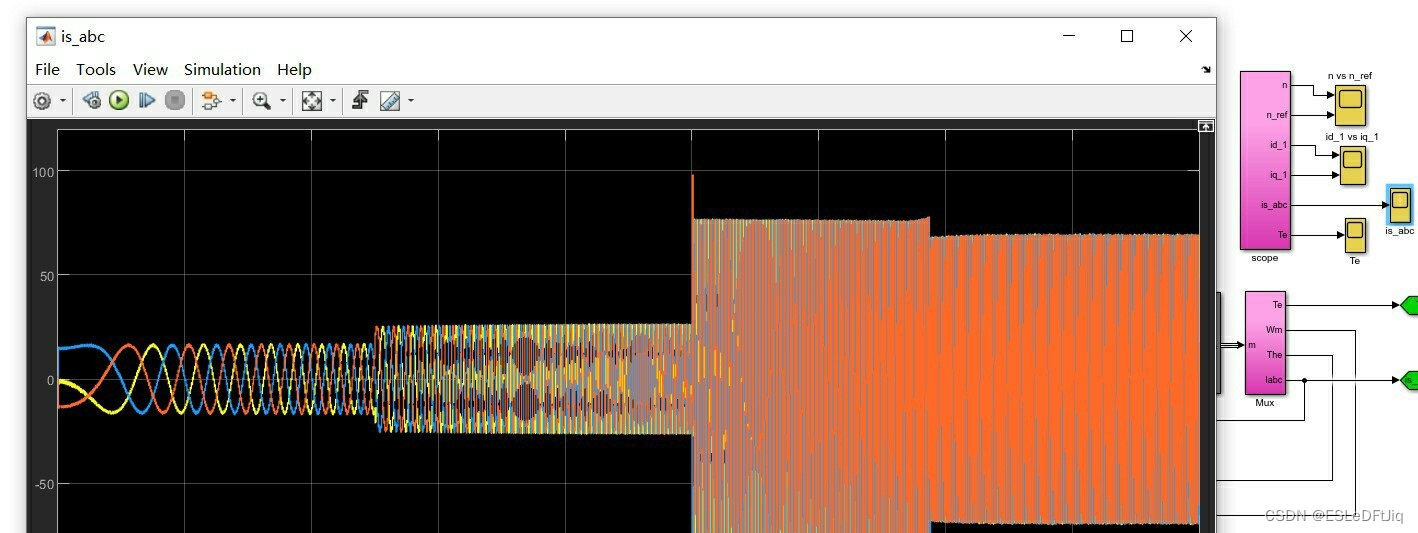
(6)仿真波形见截图。
仿真学习,biye设计好资料,2015B版本以上。
永磁同步电机是当今工业领域中最为常见的电动机之一,因为其高效、低噪音、容易控制和长寿命等优点而备受青睐。然而,在实际应用中,永磁同步电机的弱磁工况下,传统的矢量控制方法会出现效率低下、控制困难、电流波动等问题,因此,提高弱磁工况下永磁同步电机的控制精度一直是电机控制领域研究的热点之一。本文将介绍一种基于反馈电压环的弱磁控制MATLAB仿真模型,同时结合MTPA(磁场定向矢量控制),使定子电流最小,提高永磁同步电机的控制精度。
首先,我们需要搭建基于反馈电压环的弱磁控制MATLAB仿真模型。这个模型可以根据永磁同步电机的特性和控制策略来模拟电机的电流、电压等参数,从而实现对永磁同步电机的控制。同时,我们也需要结合MTPA磁场定向矢量控制,这种控制方法可以使电机的定子电流最小,从而达到更高的效率和更稳定的控制。
其次,为了进一步提高永磁同步电机的控制精度,我们需要引入前馈解耦控制。这种控制方法可以消除电机在弱磁矢量控制下的非线性特性,提高控制精度和响应速度。
第三,为了更好的控制永磁同步电机,我们需要引入SVPWM空间矢量调制技术。这种技术可以通过精确调节电路中的PWM信号,使得电机的电压和电流更加稳定,同时还具有过调制和电压重构功能,这些功能可以进一步提高电机的控制精度和效率。
最后,我们需要对整个仿真模型进行产品级别的测试和评估。通过仿真波形和参考资料的对比分析,我们可以得出模型的优缺点和适用范围,从而为实际应用提供参考。
综上所述,本文提出了一种基于反馈电压环的永磁同步电机控制模型,结合MTPA、前馈解耦控制和SVPWM空间矢量调制技术,实现了对永磁同步电机的高精度控制。该模型具有利用率高、控制精度高、响应速度快等优点,可以满足不同应用下永磁同步电机的控制需求。
相关代码,程序地址:http://lanzouw.top/630472704281.html


















 3163
3163

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









