






 本文详细探讨了永磁同步电机的数学模型,重点介绍了id=0矢量控制、MTPA最大转矩电流比控制和弱磁控制策略,并通过MATLAB仿真展示了这些控制方法在不同条件下的性能。实验证明MTPA控制在基速以下效果优于id=0,而弱磁控制在高转速范围内提供更好的转速范围扩展。
本文详细探讨了永磁同步电机的数学模型,重点介绍了id=0矢量控制、MTPA最大转矩电流比控制和弱磁控制策略,并通过MATLAB仿真展示了这些控制方法在不同条件下的性能。实验证明MTPA控制在基速以下效果优于id=0,而弱磁控制在高转速范围内提供更好的转速范围扩展。
永磁同步电机控制策略研究MATLAB仿真
永磁同步电机--id=0、MTPA、弱磁控制策略MATLAB仿真
前言
由于课题需要,在学习永磁同步电机的控制技术。看了很多文献、资料和书籍,总是似懂非懂被很多问题所困扰。在一篇博文里看到,有经验的驱动工程师说:要控制电机,首先要对控制对象了如指掌,说白了就是要对电机的数学公示非常熟悉,其次要对电机运行过程中的各种电流和电压波形了然于胸。看到这段话,就有了在学习电机控制原理的同时结合仿真观察波形的想法,数形结合更有利于理解。
学习资料
《永磁同步电机控制原理及MATLAB仿真》袁雷 | 有详细的公示和仿真系统设置 |
《车用驱动电机原理于控制基础》钟再敏 | 有详细的电机原理和控制方法的介绍 |
《永磁同步电机最大转矩电流比控制》徐佳园 | 有完整的电机坐标变换的推导步骤 |
《电动汽车用IPMSM矢量控制策略研究》郑飞 | 有MTPA和弱磁控制的原理介绍 |
《基于SVPWM过调制的超前角弱磁控制永磁同步电机的策略研究》刘雨石 | 有超前角弱磁控制的推导过程 |
《永磁同步电机矢量控制系统弱磁控制研究》韩顺利 | 有详细的电机原理和弱磁控制轨迹曲线介绍 |
一、永磁同步电机数学模型
对永磁同步电机进行数学建模之前,首先做如下假设:
1) 铁芯饱和情况忽略不计;
2) 永磁材料的电导率为零;
3) 转子上没有阻尼绕组;
4) 相扰组中感应电动势波形为正弦。
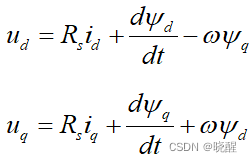
d-q坐标系下IPMSM电压方程为:
|
| (1) |
d-q坐标系下磁链方程为:
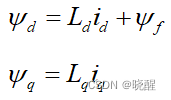 | (2) |
d-q坐标系下转矩方程为:
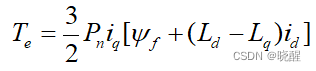 | (3) |
永磁同步电机的运动方程为:
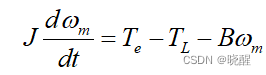 | (4) |
其中:
id、iq分别是q轴电流分量和d轴电流分量;
Ld、Lq分别是d轴与q轴等效电感;
ψd、ψq分别是d轴与q轴磁链分量;
ψf是永磁体磁链;
Pn是极对数;
TL是负载转矩;
J是转动惯量;
ωm是电机的机械角速度;
B是阻尼系数。
二、永磁同步电机矢量控制策略
矢量控制选用转子磁场定向方法,三相电流经过由三相静止坐标系到两相静止坐标系,再由两相静止坐标系到两相旋转坐标系d-q轴的变换,将d轴定在转子磁链的方向,则交流电机就变成了由励磁电流分量id和转矩电流分量iq分开控制的直流电机。
2.1 id=0矢量控制策略
根据式(3),d-q坐标系下永磁同步电机转矩方程为

式中,第一项为励磁转矩,第二项为磁阻转矩。采用id=0矢量控制策略时id=0,转矩方程变成
 | (5) |
从式(5)可以看出,采用id=0控制策略时,仅控制iq就可以控制转矩大小,这种控制策略简单且易于实现。然而IPMSM中Lq不等于Ld,但是也因为采用了id=0控制策略,导致电机磁阻转矩为零,因此,插入式和内装式永磁同步电机采用id=0矢量控制策略造成了电机效率上的损失,而且降低了转矩的性能。
2.2 转矩/电流比最大控制策略
IPMSM由于d轴有永磁体存在,所以Lq不等于Ld,根据式(3),d-q坐标下永磁同步电机转矩方程为
由转矩方程可以看出,在ψf、Pn、Ld、Lq 为已知情况下,对于任意 Te 都有无数组 id、iq 解,这就选择一个规则来选取电流组合,不同控制目标对应不同的规则选取,通常选择MTPA 控制策略来选取电流组合,MTPA控制策略就是产生同样的电磁转矩所需要的电流为最小的原则,这样就可以把这个问题变为定子电流在转矩方程下求极值的问题:
约束条件为
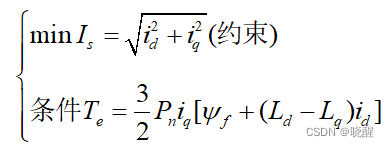 | (6) |
采用辅助函数为
 | (7) |
式(7)中,λ为拉格朗日因子,分别对id、iq、λ求其偏导,可求得MTPA控制策略的电流表
达式:
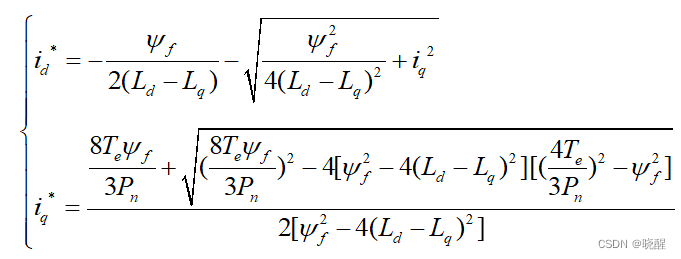 | (8) |
电机在基速以下运行时,铜耗占比很大,采用MTPA矢量控制策略由于减小了定子电流,所以可以降低电机铜耗,而由于转矩方程第二项也不为零,因此电机灵活有效的应用了磁阻转矩从而提高转矩的生成能力,电机效率和功率密度也得到了提高。
2.3 弱磁控制策略
永磁同步电机的最大输出受到逆变器输出的极限电压和极限电流制约,而转子速度与定子电压也紧密联系,因此电机运行速度要受到极限电压的制约。
电流约束
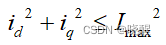 | (9) |
电压约束
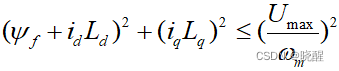 | (10) |
式中,Imax、Umax分别表示定子电流极限和定子电压极限,由式(9)和式(10)可以看出,
电流极限轨迹是固定圆形,电压极限轨迹是随着转速ωm上升而逐渐内缩的椭圆形。
由式(10)可得
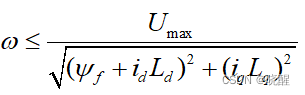 | (11) |
从式(11)中可以看出,当IPMSM转速持续增大,直到电压达到饱和时的转速称为基速。若还需要继续增加转速,只有想办法减小分母部分,常用的方法是施加与d轴相反的电流来达到弱磁升速的目的。
图1所示为弱磁控制的电流轨迹示意图。转矩为T1的恒转矩曲线与转速为ω1时的电压极限椭圆交于A点,该点为采用MTPA控制的转折点,对应的转速ω1为转折速度。要提高转速到ω2(ω2>ω1),如果继续采用MTPA控制,则电流运行轨迹将沿着曲线AB,从点A运行到点B,所对应的电磁转矩为T3(T3<T2)。为了提高永磁同步电机的转矩输出能力,设法使电流轨迹不再沿着MTPA控制曲线运行,而是沿着曲线AC,从点A运行到点C,点C对应的转速也是ω2,但是该点对应的转矩为Tc(T1>Tc>T2>T3),在转速相同的情况下提高了电机的转矩输出,改善了电机在转折速度以上的运行性能。对比点B和点C可以发现,点C电机定子电流的d轴分量大于B点,即增加了d轴去磁电流分量,使电压满足电压极限椭圆的限制。
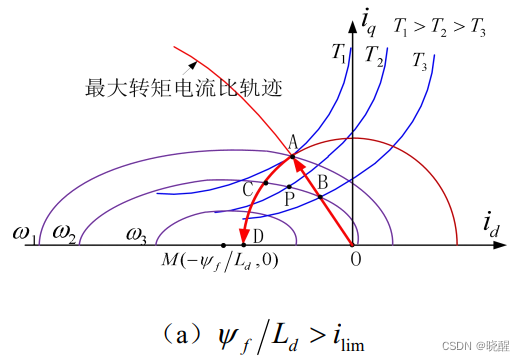
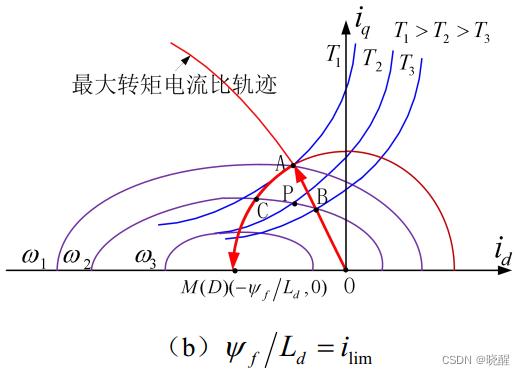
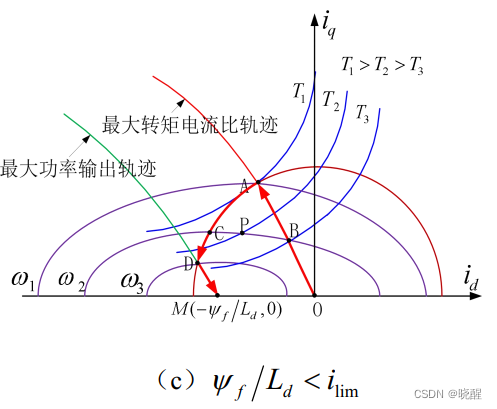
图1 弱磁控制电流轨迹
弱磁控制的三个区域如下图所示:
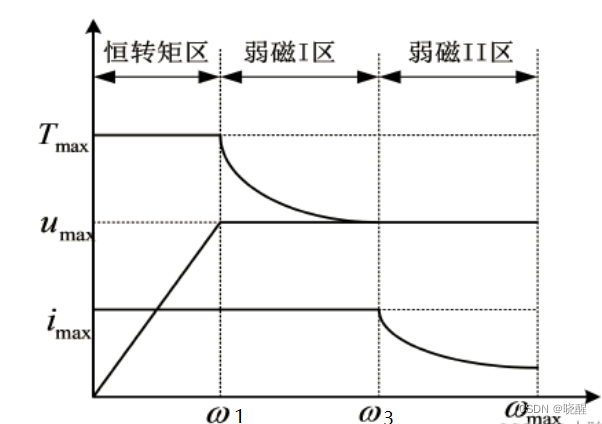
图2 弱磁控制的三个区域
采用超前角方法来达到弱磁控制,其原理如图3所示。
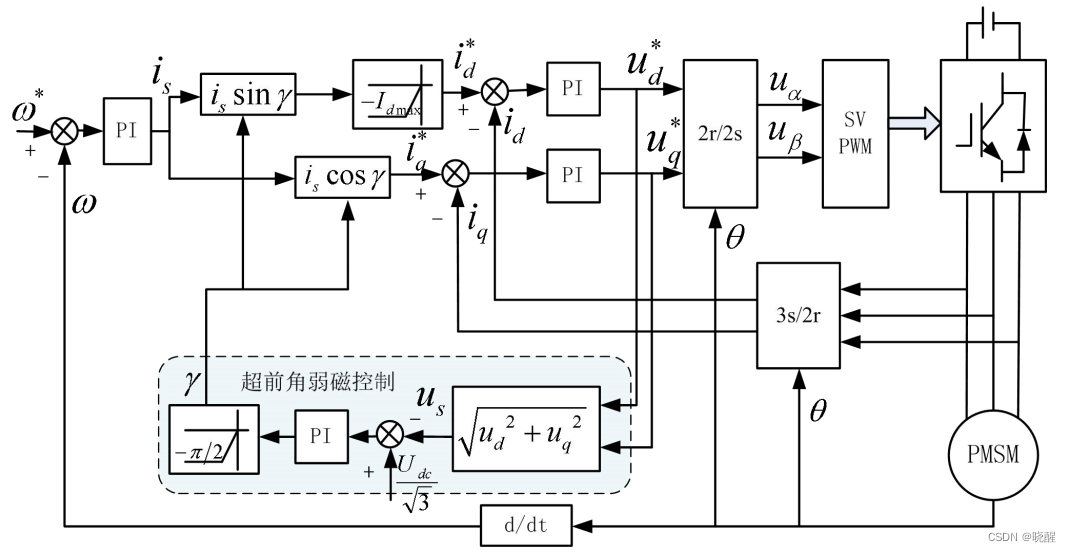
图3 超前角弱磁控制原理
三、仿真与结果
电机参数如下:
| 电机极数 | 8极 |
| 线电阻(Ω) | 3.06 |
| 感应电压常数(V/krpm) | 51.5 |
| 转动惯量(Kg·m2) | 0.000290 |
| 磁通量(Wb) | 0.1003 |
| 转速(rpm) | 1320 |
负载曲线如图4所示。没有实验需求的可以直接用正弦信号代替。
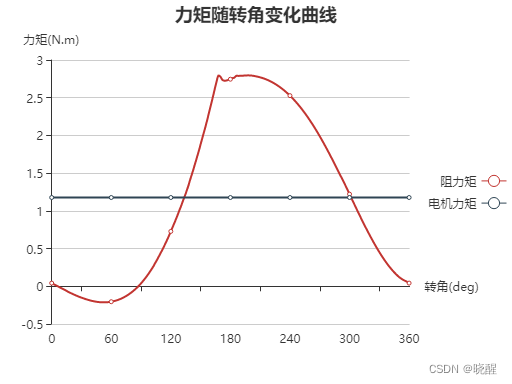
图4 力矩随转角变化曲线
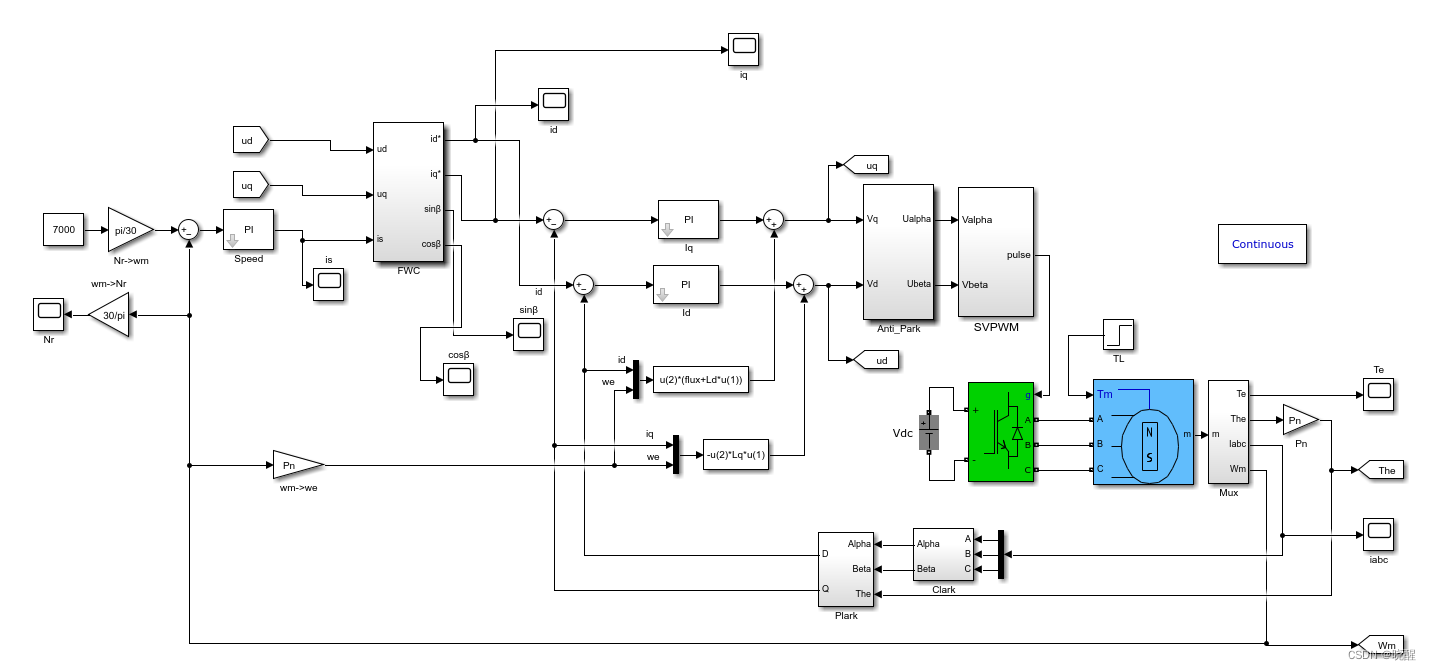
MTPA控制策略的MATLAB仿真框图如图5所示,其他控制方法将MTPA模块更换即可。
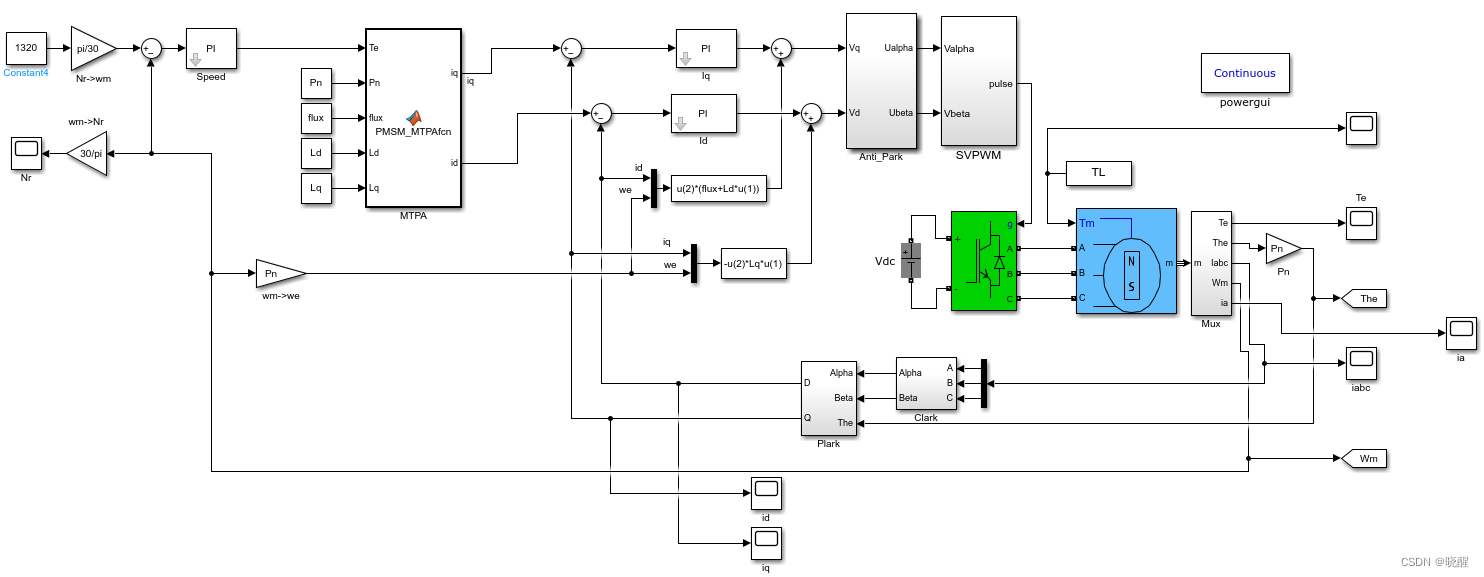
图5 MATLAB仿真框图(MTPA)
此处的MTPA控制代码:
function [iq,id] = PMSM_MTPAfcn(Te,Pn,flux,Ld,Lq)
% id、iq是电流环的给定,也就是MTPA的输出
% 第一步 计算iq
num1 = 8*Te*flux/(3*Pn);
num2 = flux^2-4*(Ld-Lq)^2;
num4 = num1^2-4*num2*((0.5*num1/flux)^2-flux^2);
iq = (num1+sqrt(num4))/(2*num2);
%第二步 计算id
num3 = flux*0.5/(Lq-Ld);
num5 = 0.25*flux^2/(Ld-Lq)^2+iq^2;
id = num3-sqrt(num5);
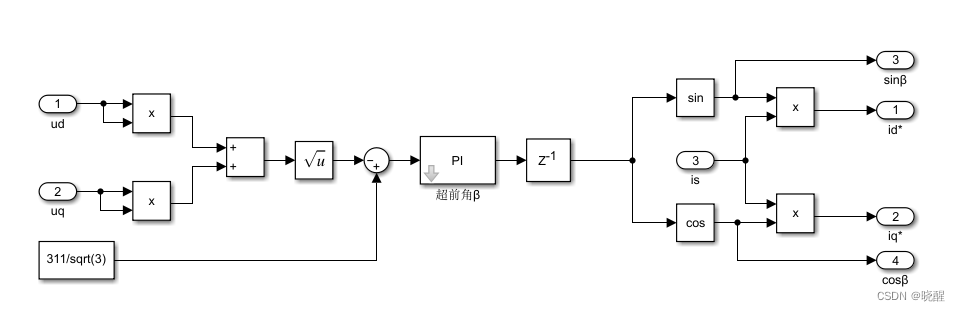
end此处的超前角弱磁控制的仿真框图为
FWC模块为
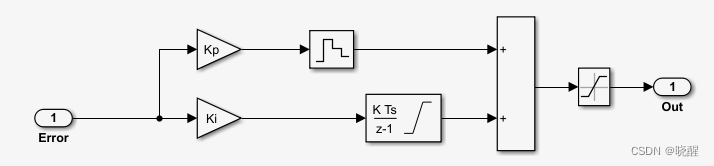
PI模块为
3.1 id=0矢量控制仿真
额定中间制冷工况下id=0控制,转速1320rpm仿真结果如图所示。
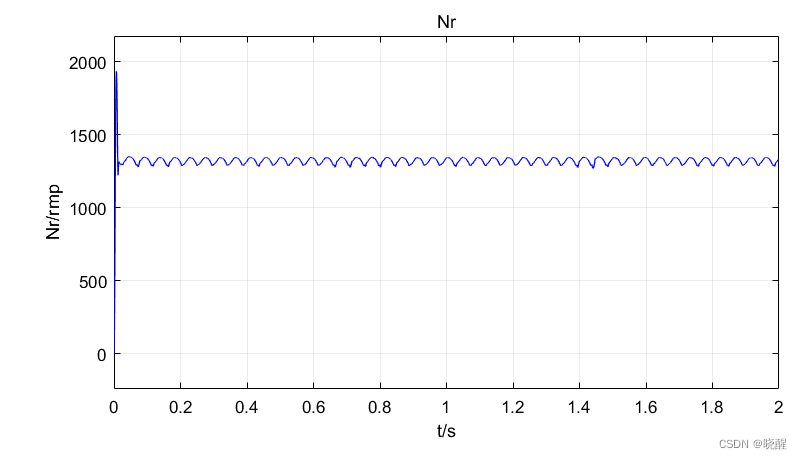
图6 id=0控制转速曲线
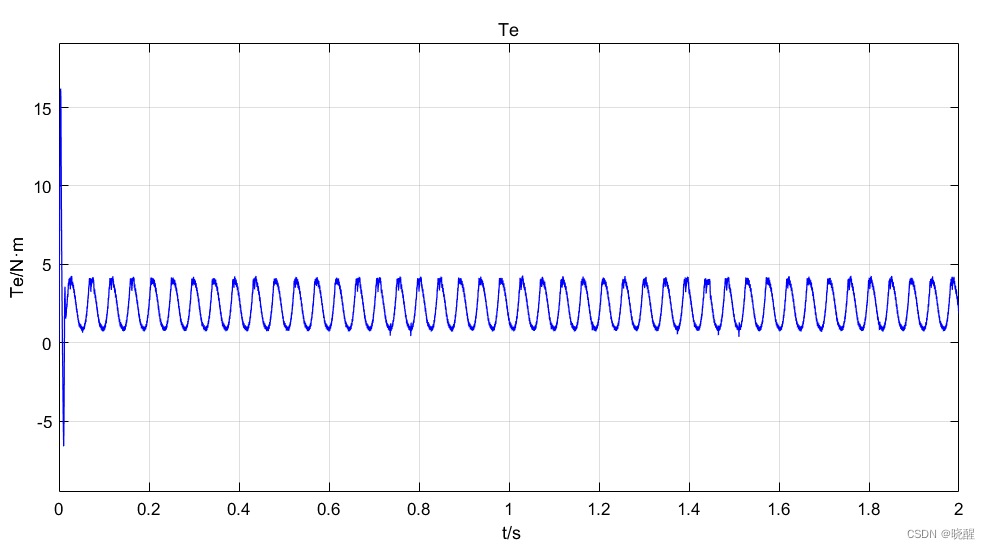
图7 id=0控制输出转矩曲线
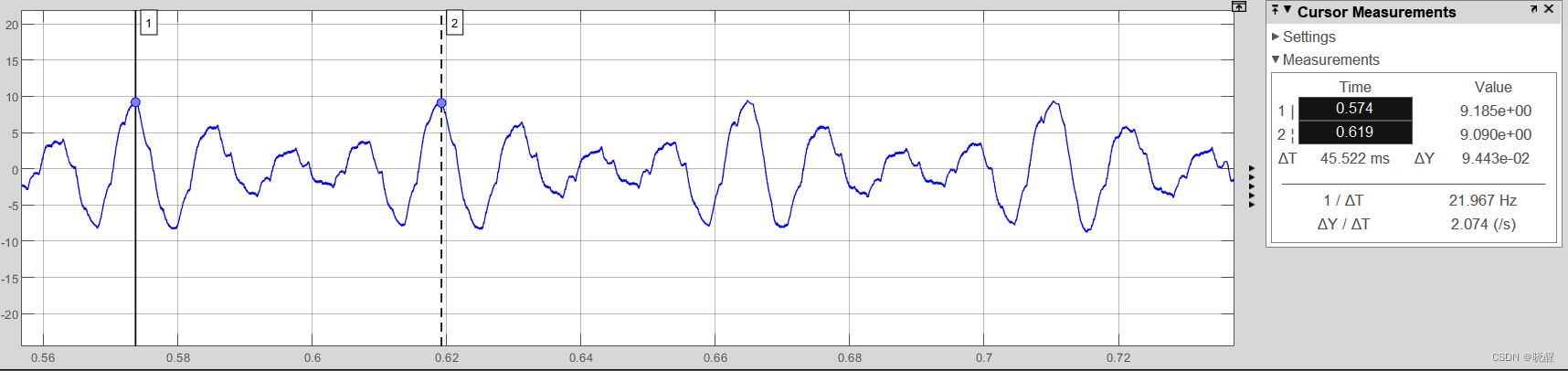
图8 U相电流
3.2 MTPA控制仿真
额定中间制冷工况下MTPA控制,转速1320rpm,仿真结果如图所示。
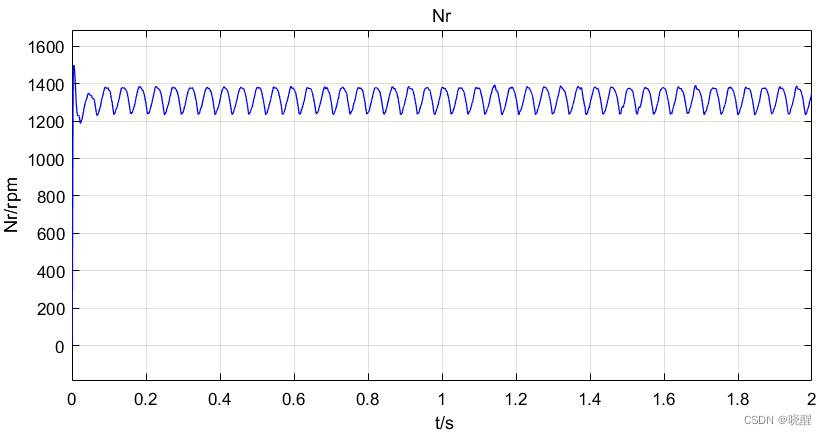
图9 MTPA转速曲线
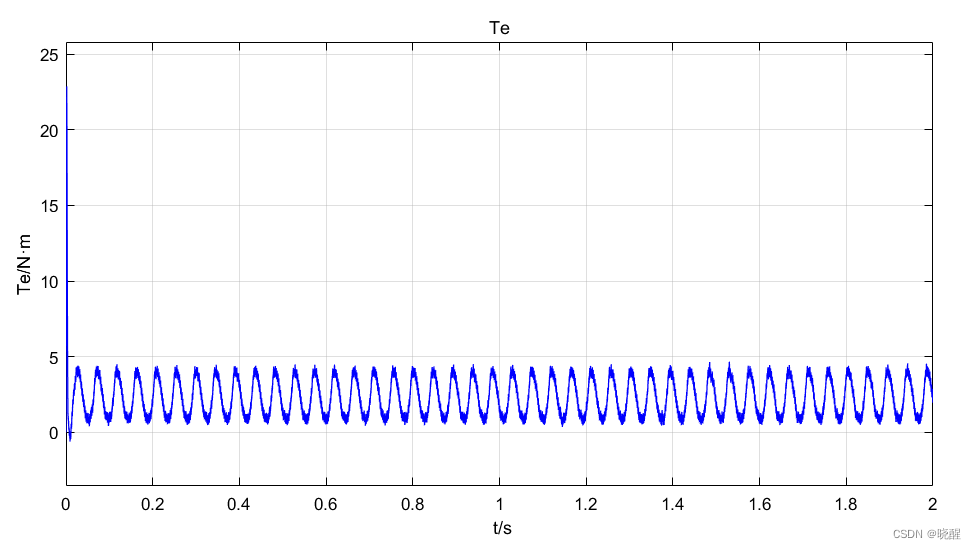
图10 MTPA输出转矩曲线
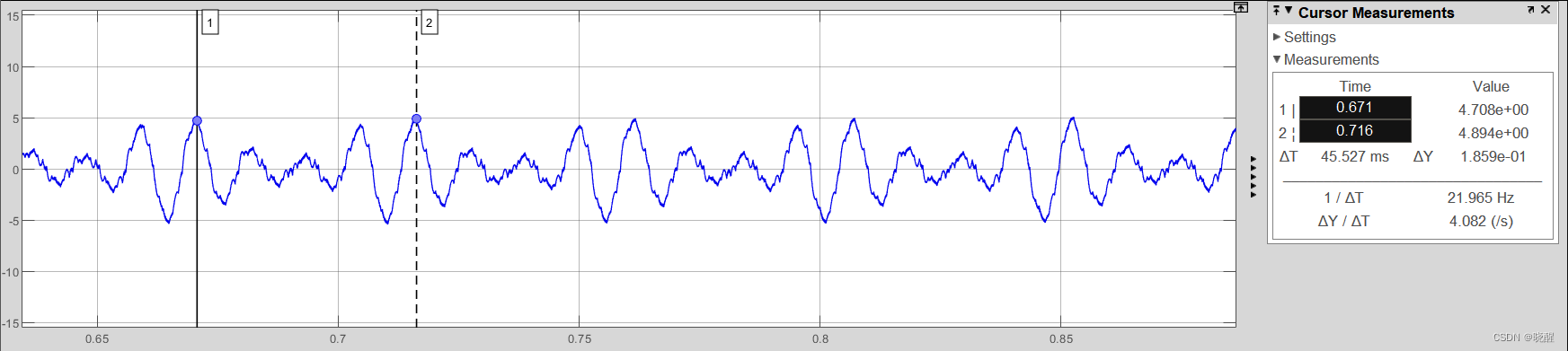
图11 U相电流
结果分析:
从id=0控制和MTPA控制的输出转矩仿真结果可以看出,所搭建的仿真控制系统IPMSM的输出转矩都不是恒定转矩,随着负载转矩的变化存在力矩补偿。与实测数据进行对比电流波形如下图所示。

图12 实测U相电流波形
id=0控制的转速波动较小,但电机电流较大;MTPA控制与id=0控制相比,转速波动较大,电机电流较小。通过电流值和电流波形的对比,发现实验所用控制器的控制结果与MTPA控制的仿真结果较相似。
3.3 弱磁控制仿真
在弱磁控制仿真时,电机初始时刻转速为7000rpm空载运行,三种控制策略的仿真结果如图。
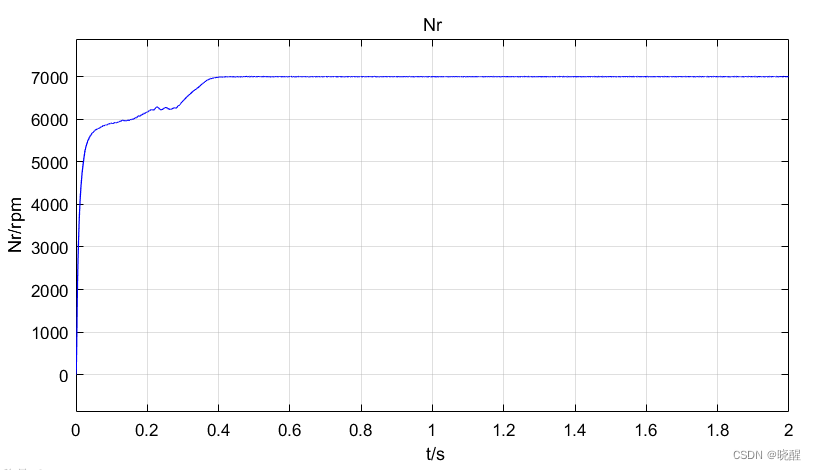
图13 弱磁控制转速曲线
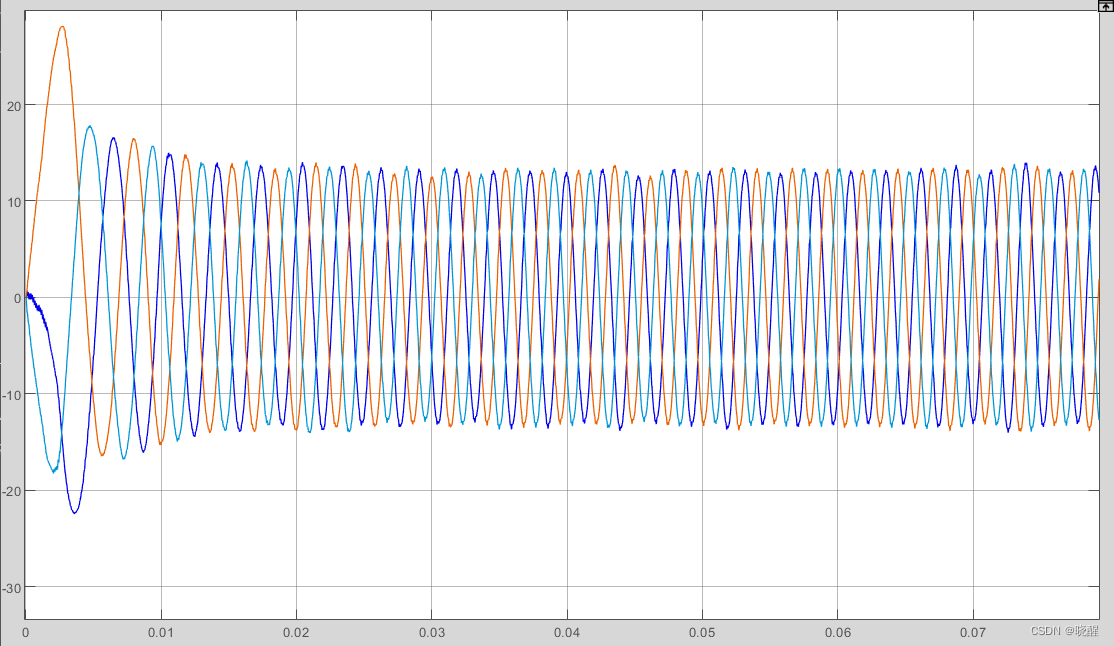
图14 弱磁控制电流曲线
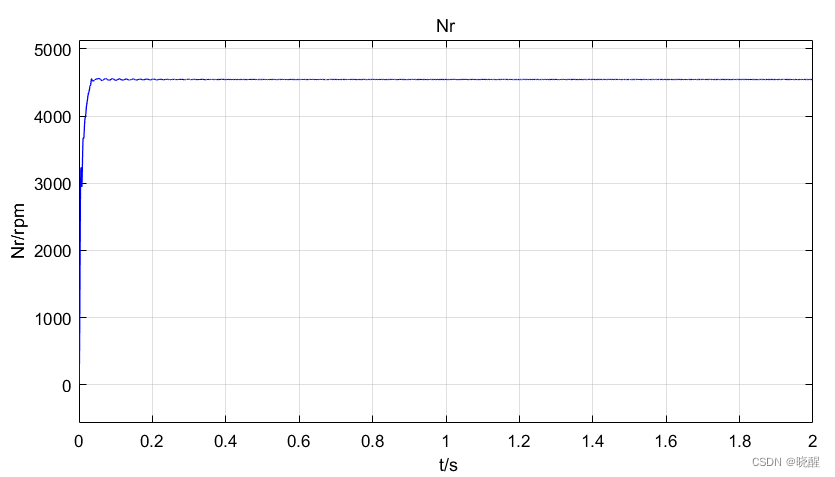
图15 MTPA控制转速曲线
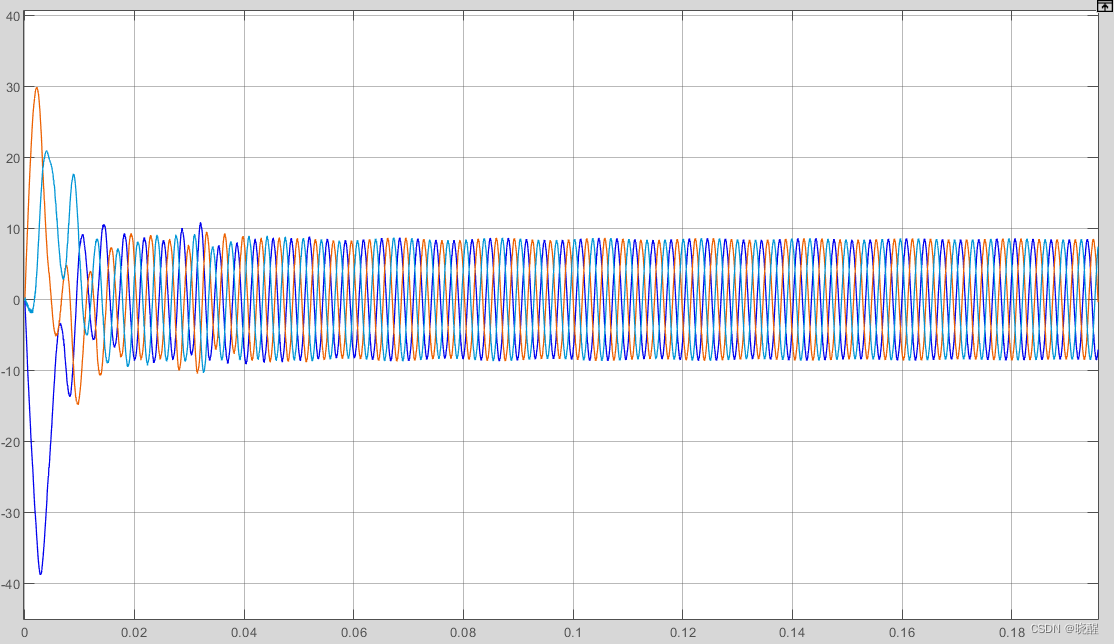
图16 MTPA控制电流曲线
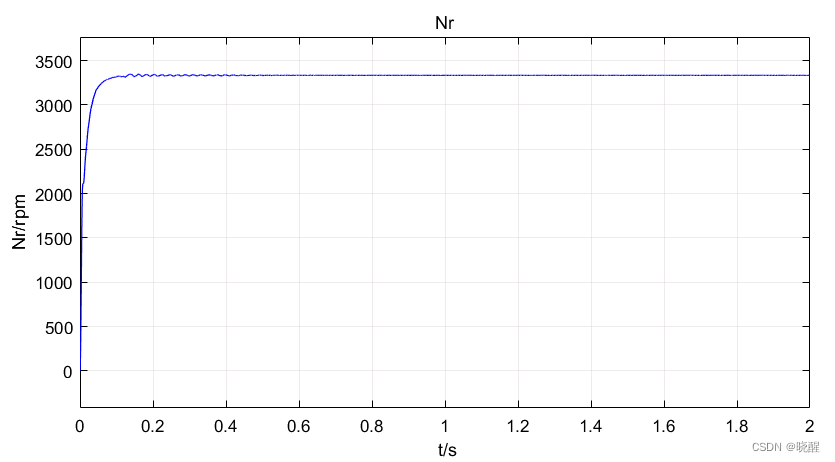
图17 id=0控制转速曲线

图18 id=0控制电流曲线
对比图15~图18可以看出,当目标转速设定在基速以上时,id=0控制下的转速已经达不到目标转速而且调速范围较小;MTPA控制下的转速也达不到给定转速,但相比id=0控制要相对较好;而采用弱磁控制策略可以很好的达到7000rpm。因此,基速以上时采用弱磁控制可以拓宽IPMSM的最大转速范围。
四、总结
1) id = 0 控制策略具有算法简单、易于实现、动态响应快的特点,但是存在转矩利用不充分、功率密度低、弱磁调速范围小的缺点;
2) MTPA 控制策略具有产生相同转矩定子电流最小、电机效率更高及转矩生成能力高的特点,基速以下采用 MTPA 控制相比 id = 0 控制具有更优的效果;
3) 弱磁控制策略具有提高电机转速范围的特点。
4) 通过与实际实验数据的对比,发现实验时采用的通用控制器的控制策略更接近于MTPA控制。
文献:《电动汽车用IPMSM矢量控制策略研究》郑飞
若有错误还请指正,共同学习。















 1917
1917











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









