






基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型,资料。
(最好用Carsim2016版本及以上版本,模型不是很难,适合新手初步学习)
随着汽车行业的发展,汽车的智能化水平和安全性逐渐得到了关注和提高。其中,主动避撞和跟车功能是汽车智能化的重要组成部分,也是汽车安全性的关键技术之一。本文将介绍如何基于模型预测控制和最优控制理论,实现汽车主动避撞和跟车功能,并通过Carsim和Matlab Simulink联合仿真来验证系统的可行性。
首先,我们需要了解一些理论知识。模型预测控制(MPC)是一种先进的控制方法,它通过对系统的动态模型进行建模和预测,来实现控制目标。最优控制是一种经典的控制方法,它通过对控制系统的状态和控制信号进行优化,来实现控制目标。这两种方法结合起来,可以实现高精度、高效率的控制。
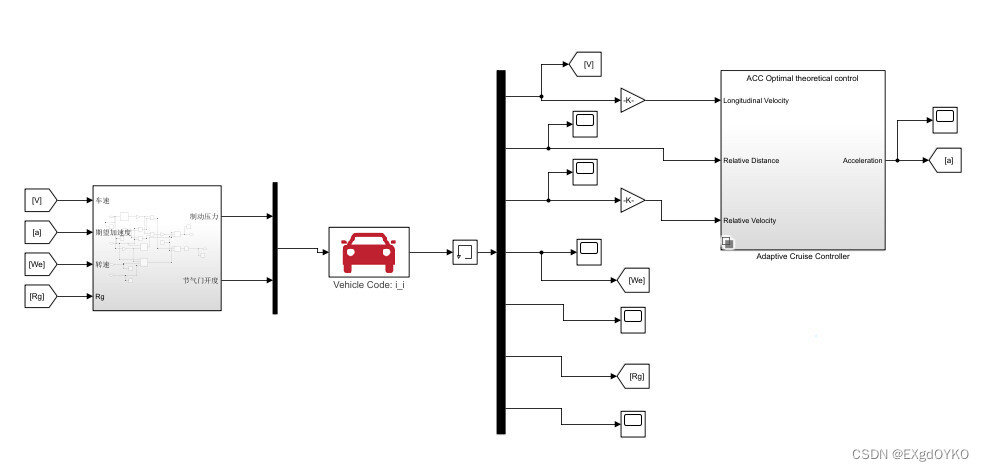
在汽车主动避撞和跟车功能中,我们需要建立汽车的动态模型,并对其进行控制。在Simulink模型中,我们需要建立车辆的逆纵向动力学模型、逆发动机模型、切换控制逻辑等模块。其中,逆发动机模型主要用于控制车辆的加速和减速,切换控制逻辑用于控制车辆的跟车和避撞功能。
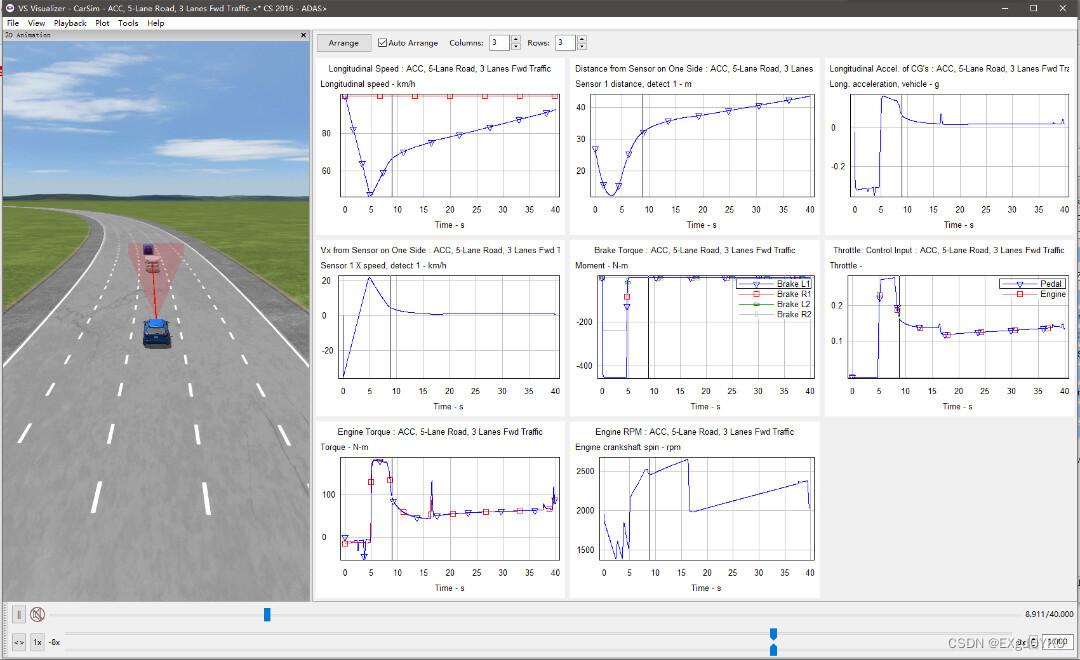
在Carsim模型中,我们需要建立车辆的动力学模型、轮胎模型、悬挂系统模型等。这些模型可以帮助我们更加准确地控制车辆的运动状态,以及分析车辆的性能和安全性。
通过Simulink和Carsim的联合仿真,我们可以验证系统的可行性,并对其进行调试和优化。在实际应用中,我们可以将该控制系统应用于汽车的自动驾驶系统中,实现汽车的智能化和自主化。
总之,基于模型预测控制和最优控制理论的Carsim与Matlab Simulink联合仿真,为汽车主动避撞和跟车功能的实现提供了一种高效、精确的控制方法。在未来,随着汽车智能化技术的不断发展,该方法将得到更加广泛的应用和推广。
相关代码,程序地址:http://lanzouw.top/644532459846.html















 3190
3190











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









