








打开点云的工具,就是一个压缩包。
一个飞机由10000个点所组成的,每个点由xyz和Nx,Ny,Nz。六个坐标组成。
每个点是位置上的关系。
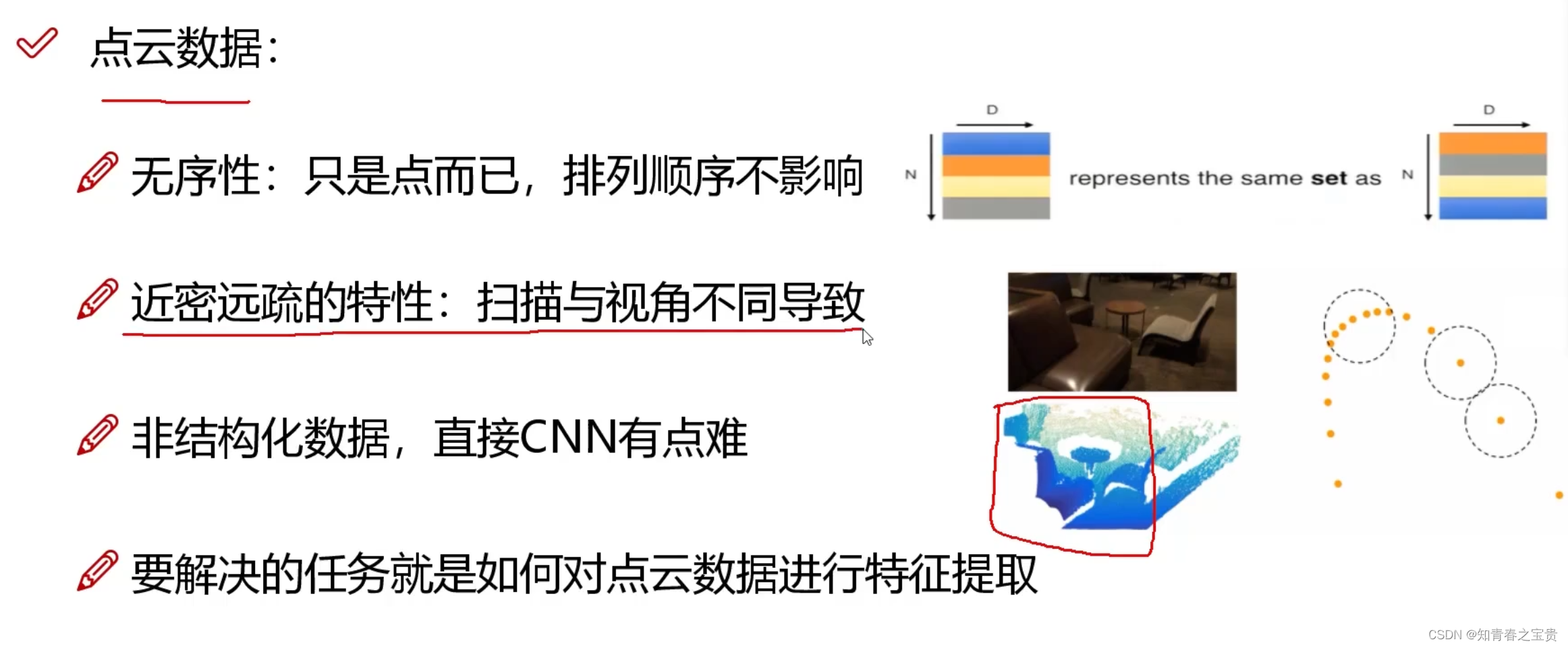
不论检测还是分类,分割,你做AI中的任何一件事,归根结底就是一件事,如何更好的提取特征。
抓住核心思想,非常重要。都喜欢用输入,输出,直接到位。多任务处理是个啥?
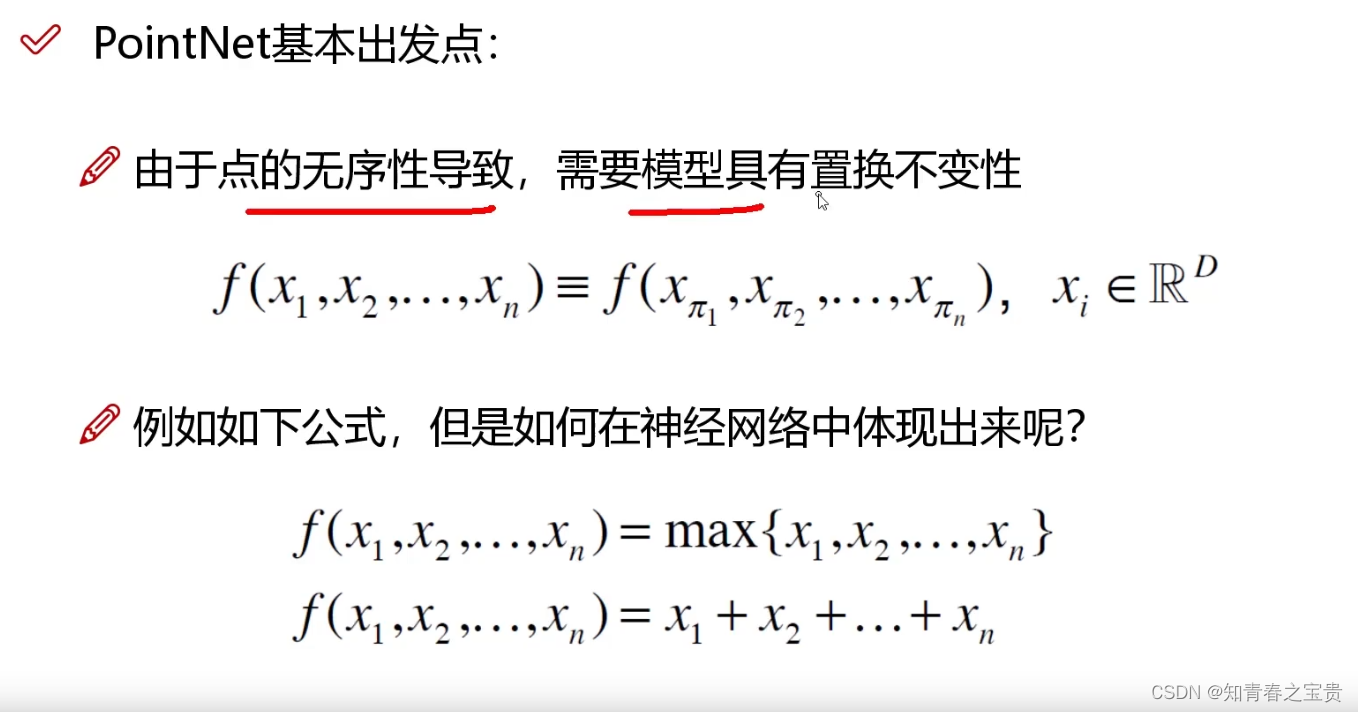
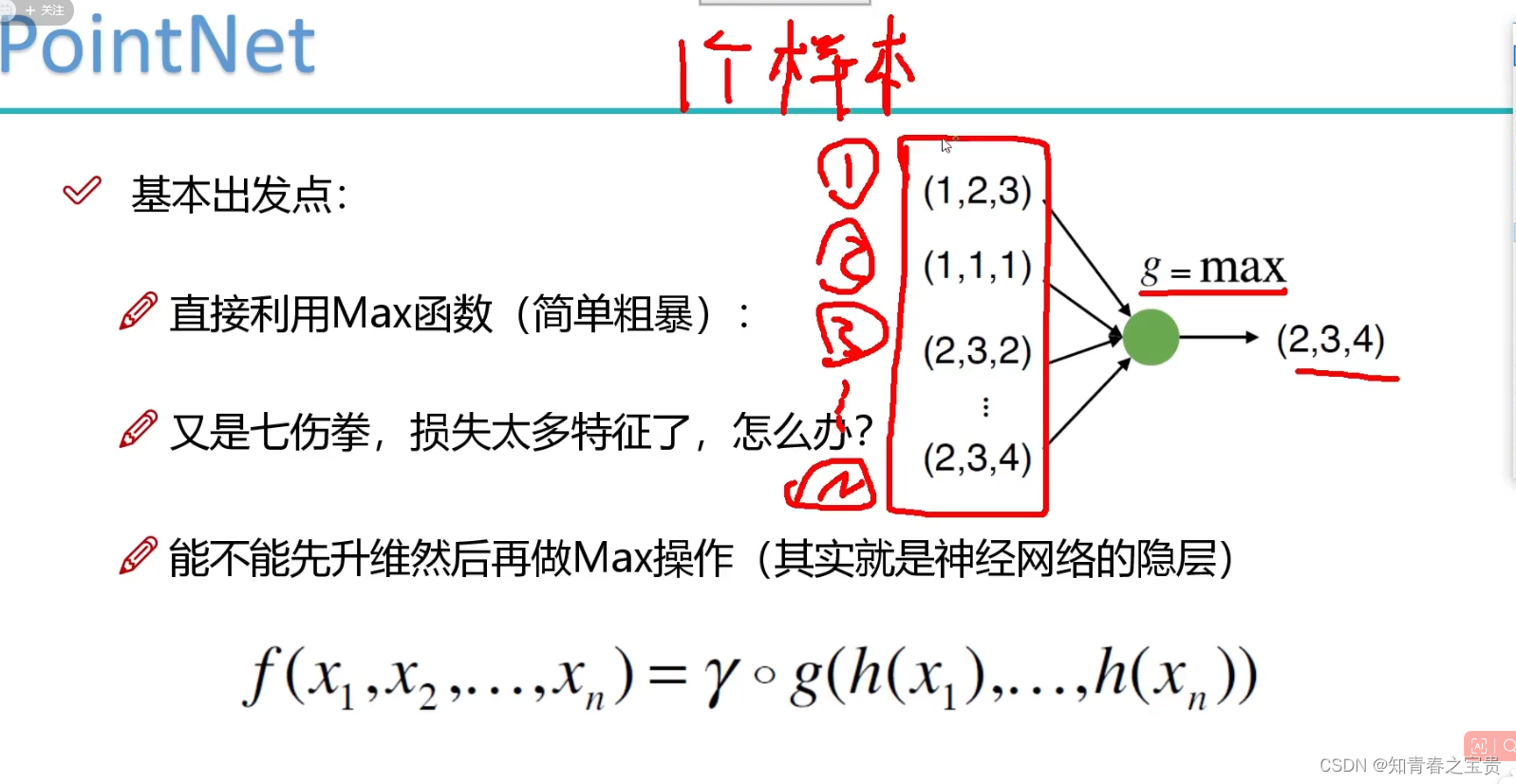
没理解最后一句话,疑问:: 升维以后,再求取最大值,与升维之前有啥区别??
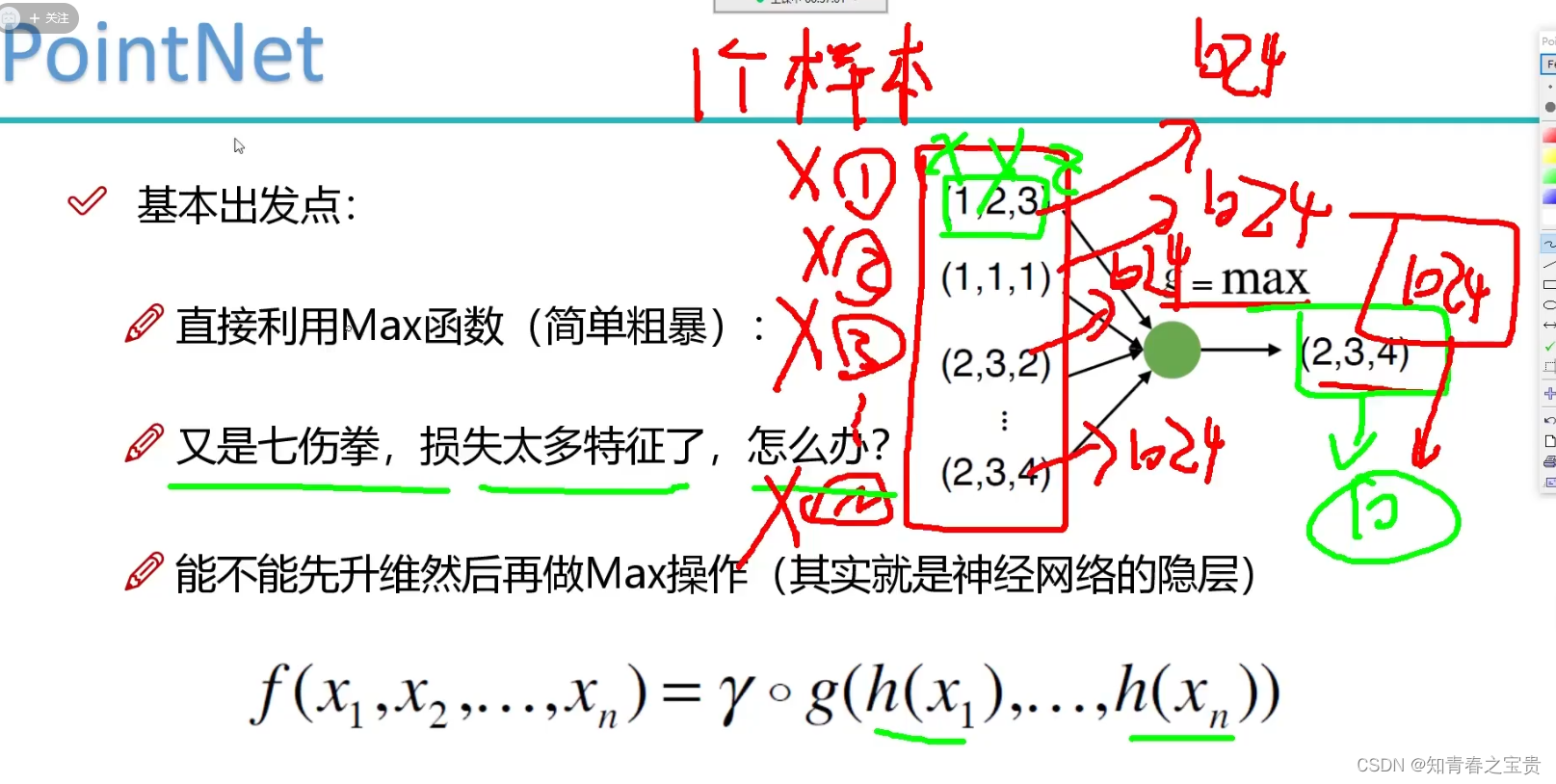
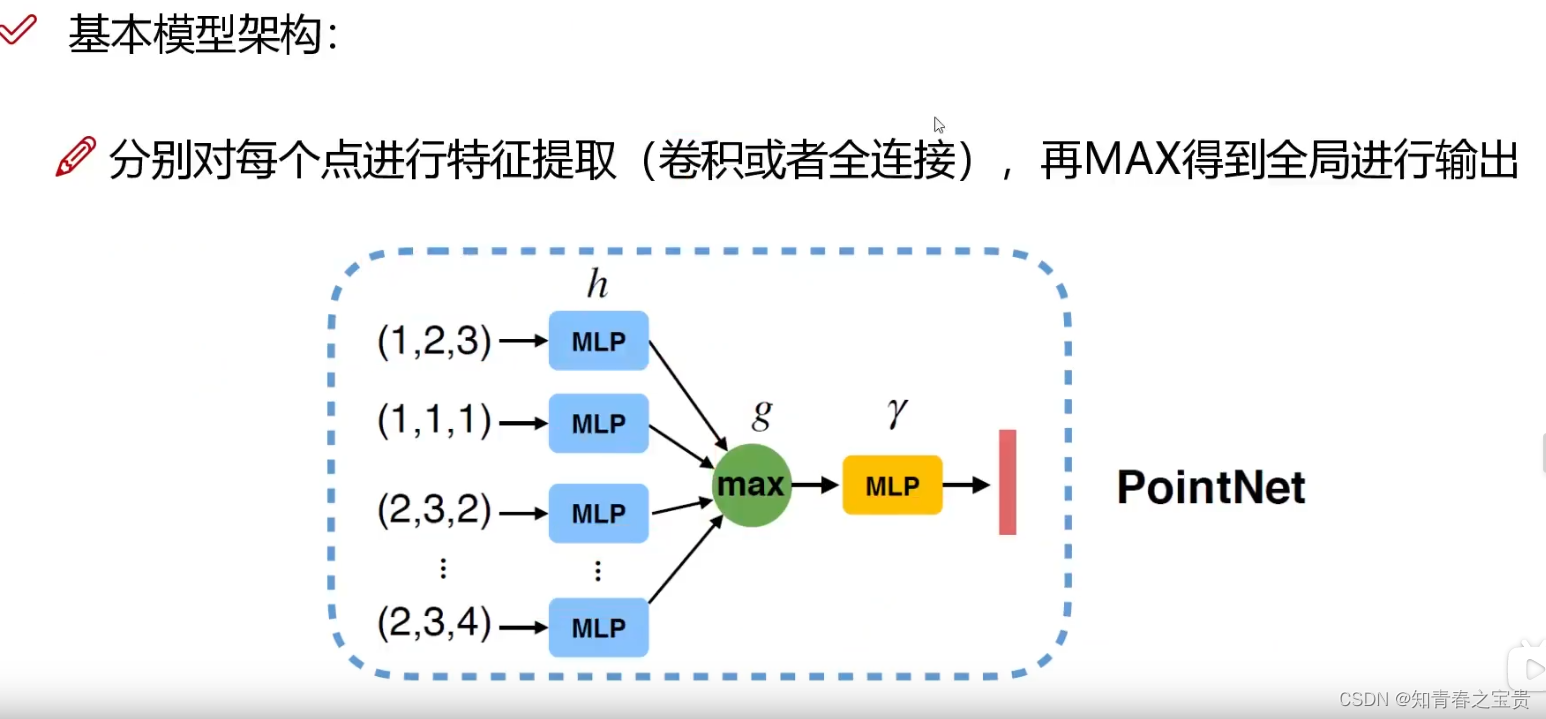
先升维度,再提取最大特征,分类。
【PointNet作者亲述】90分钟带你了解3D物体检测算法和未来方向!_哔哩哔哩_bilibili

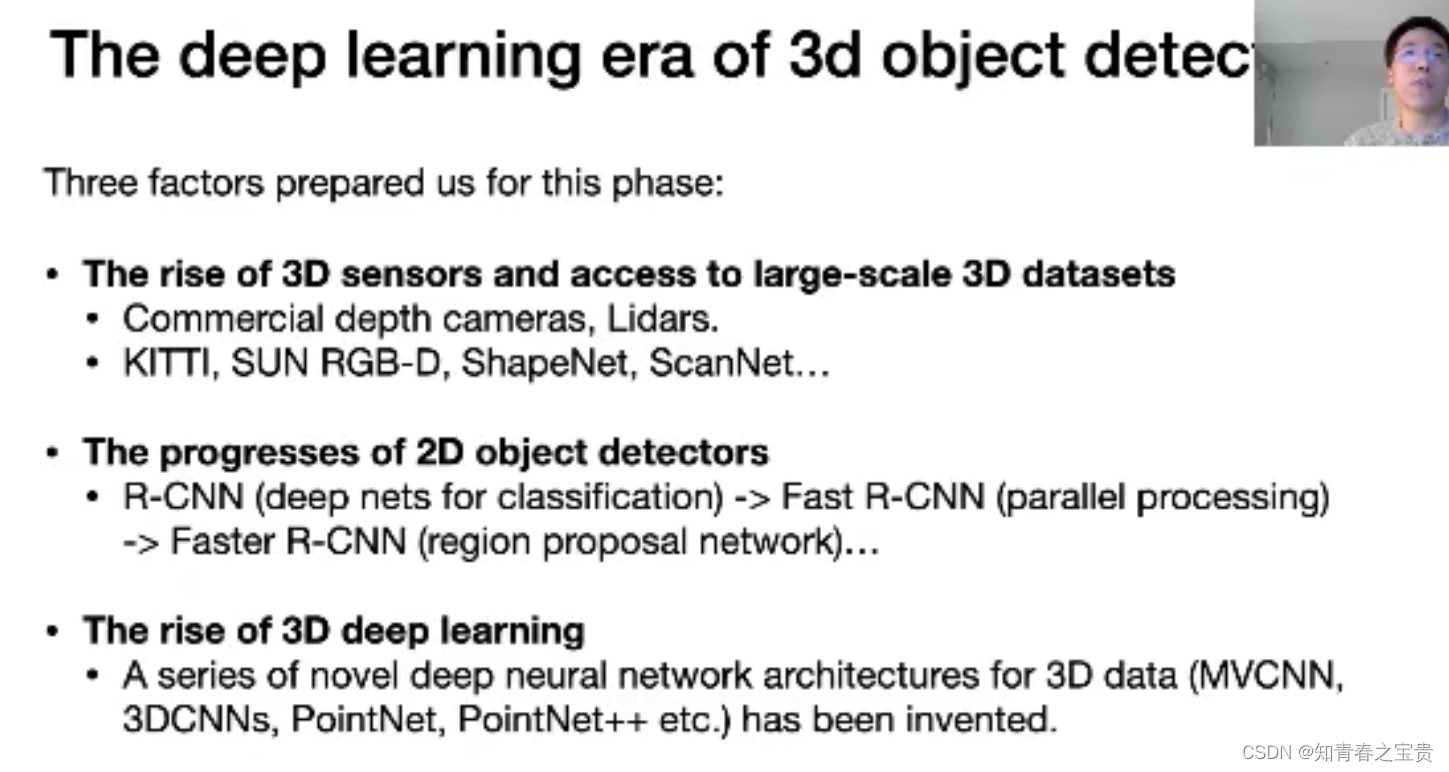
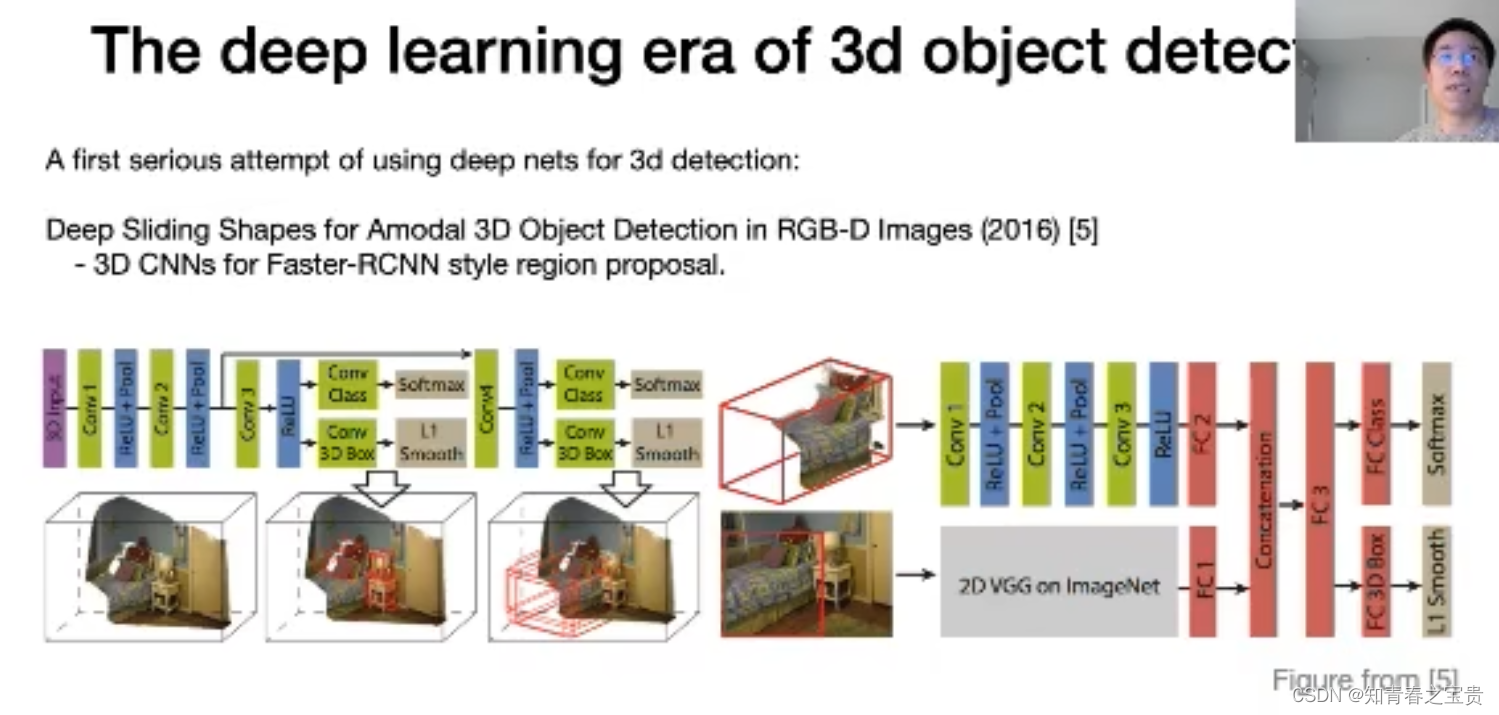
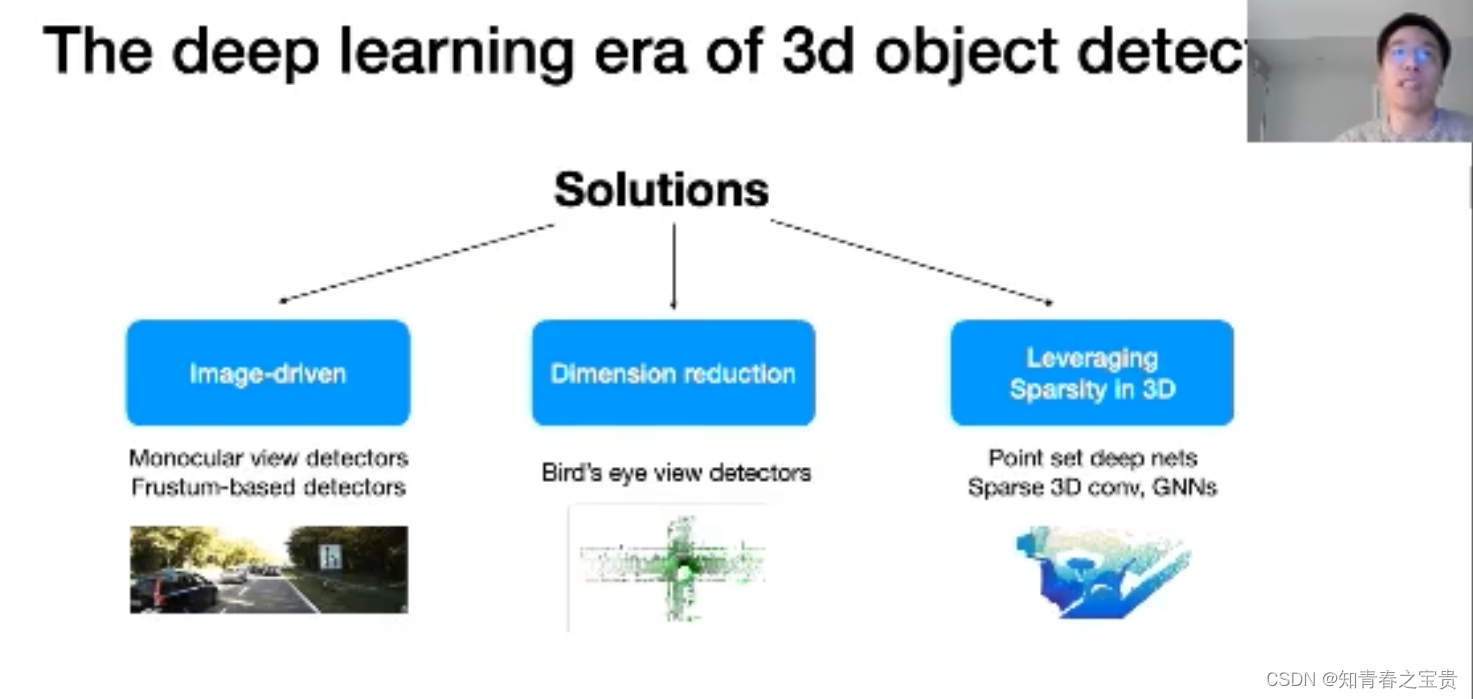
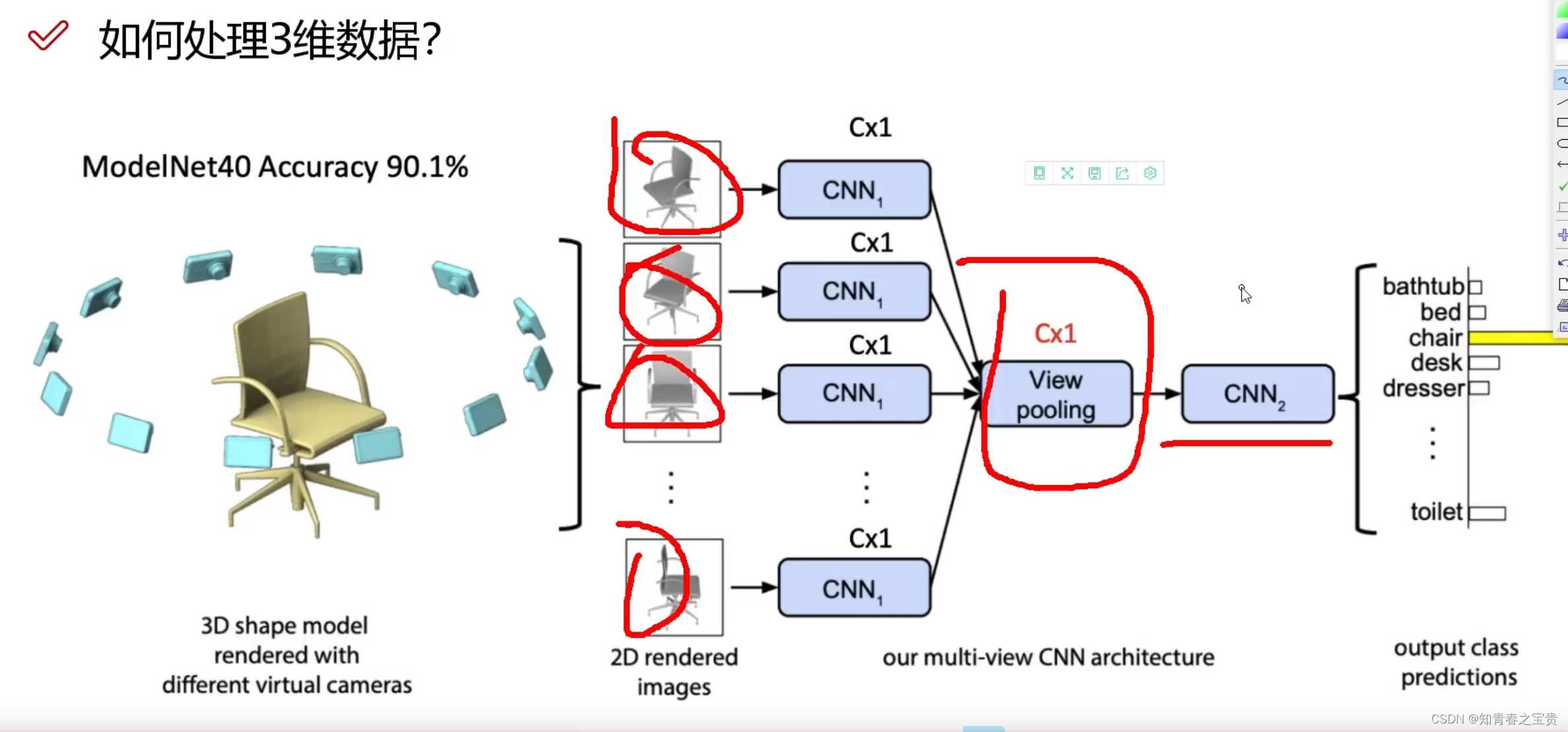
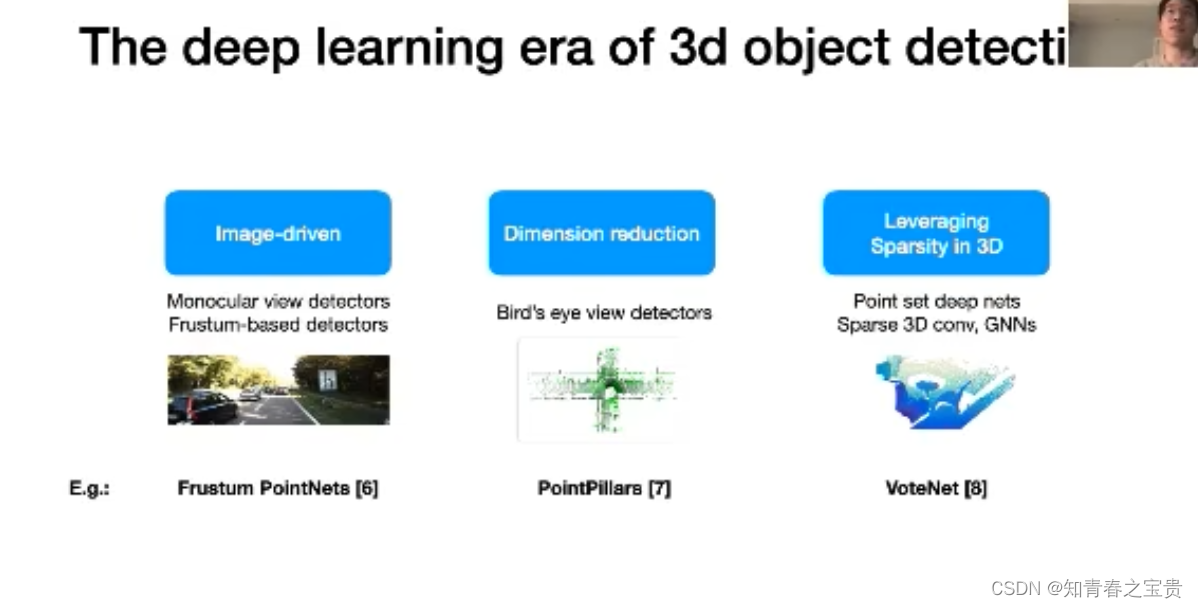
由于计算和耗时,否定3D卷积,那么,新的解决思路是什么?(由此看来,研究思路很关键,提出问题很关键)
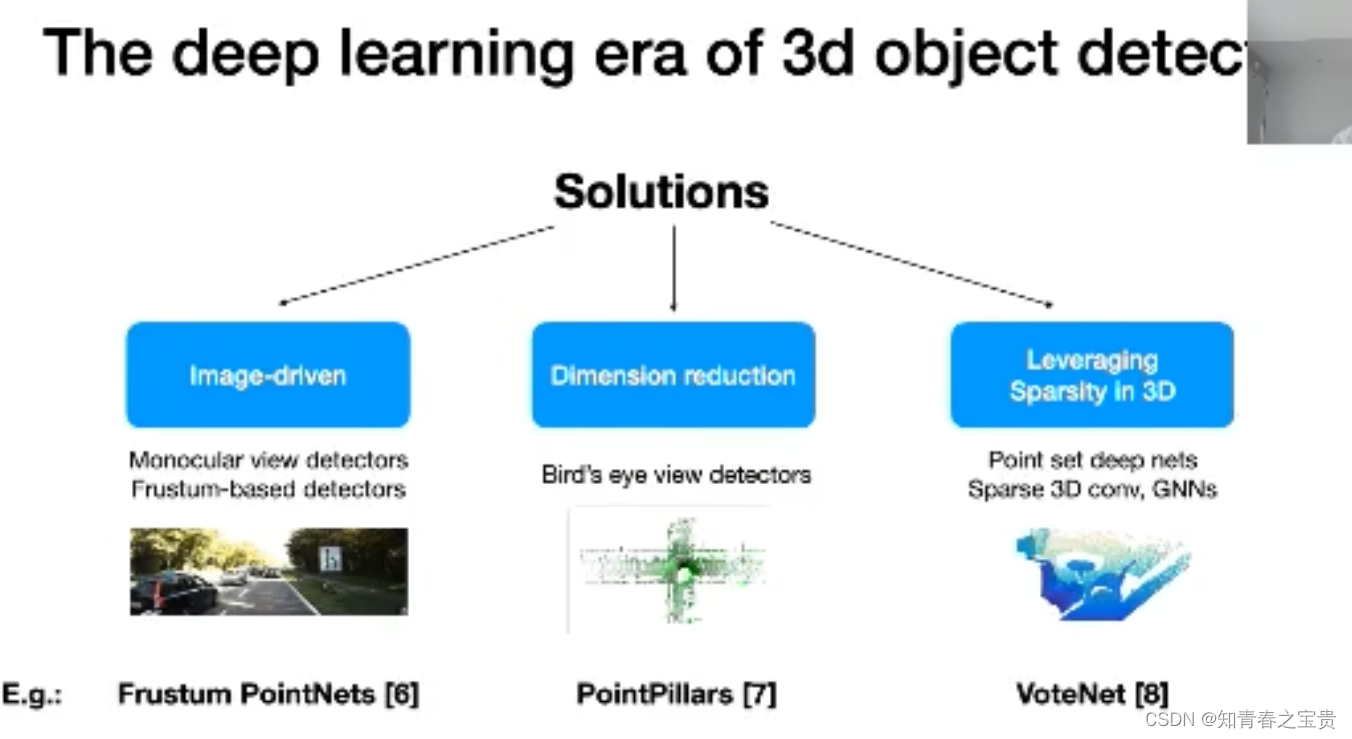
1.用图像的方法
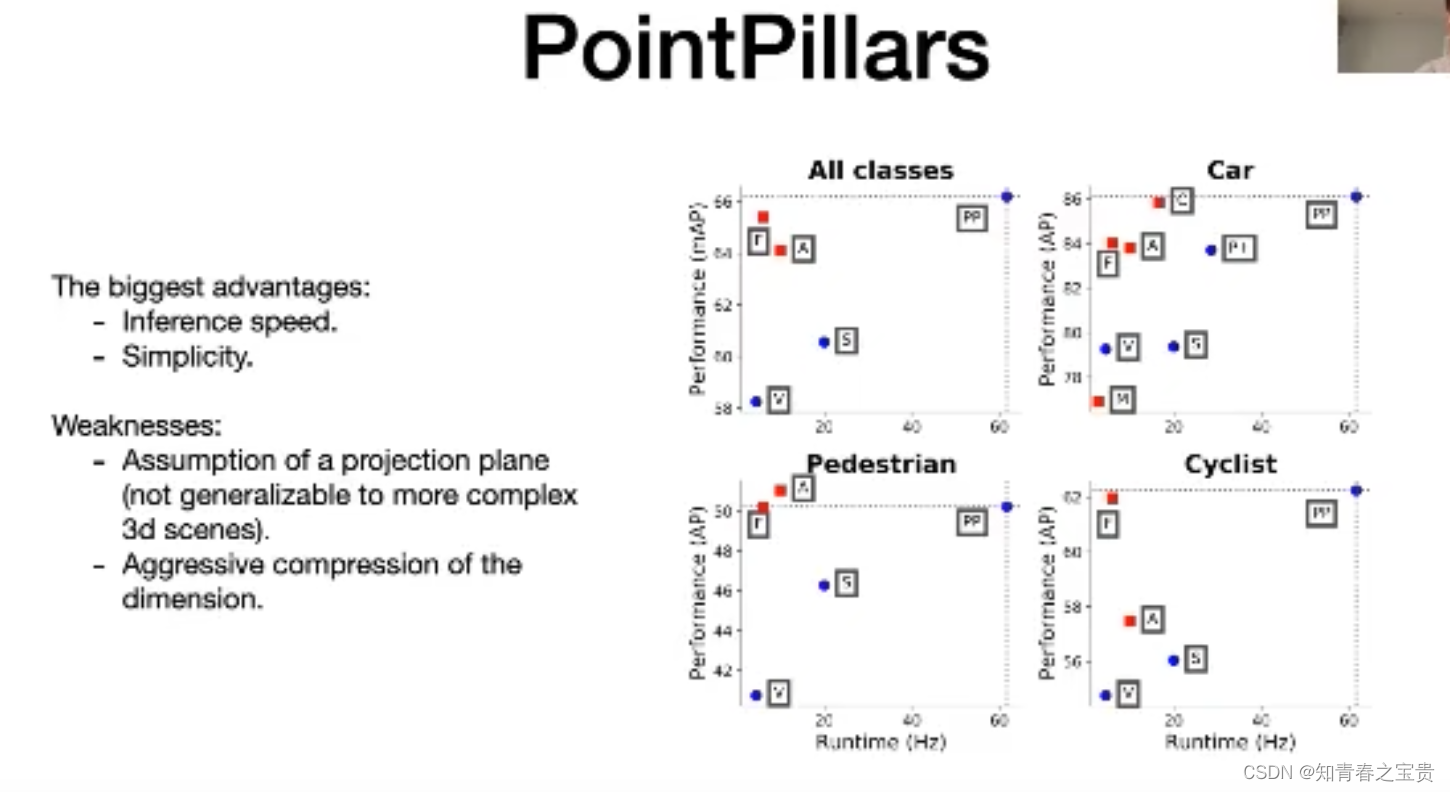
2、变成鸟瞰图,二维的来处理。
3、针对3D点云的稀疏性,寻找方案。
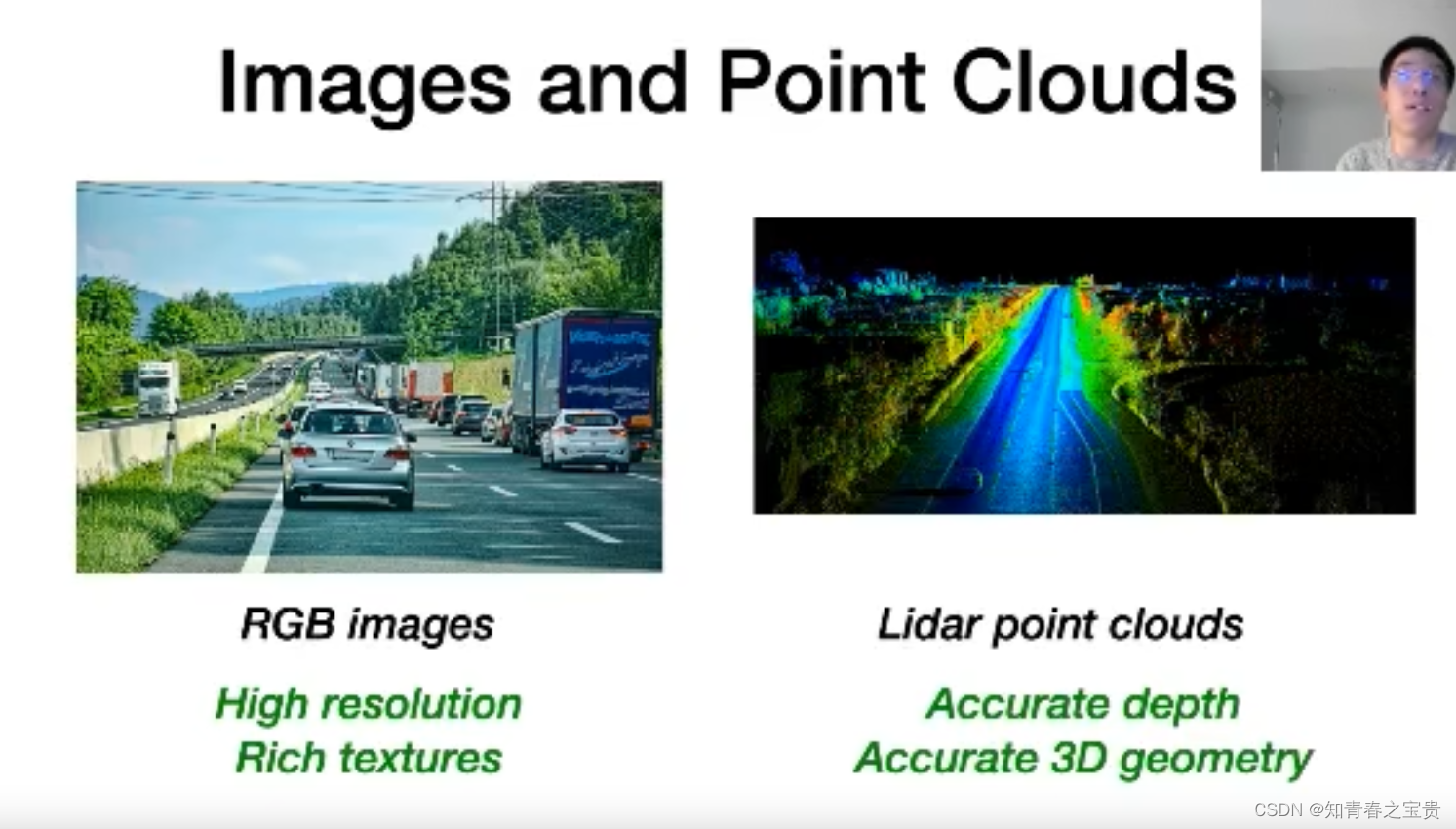
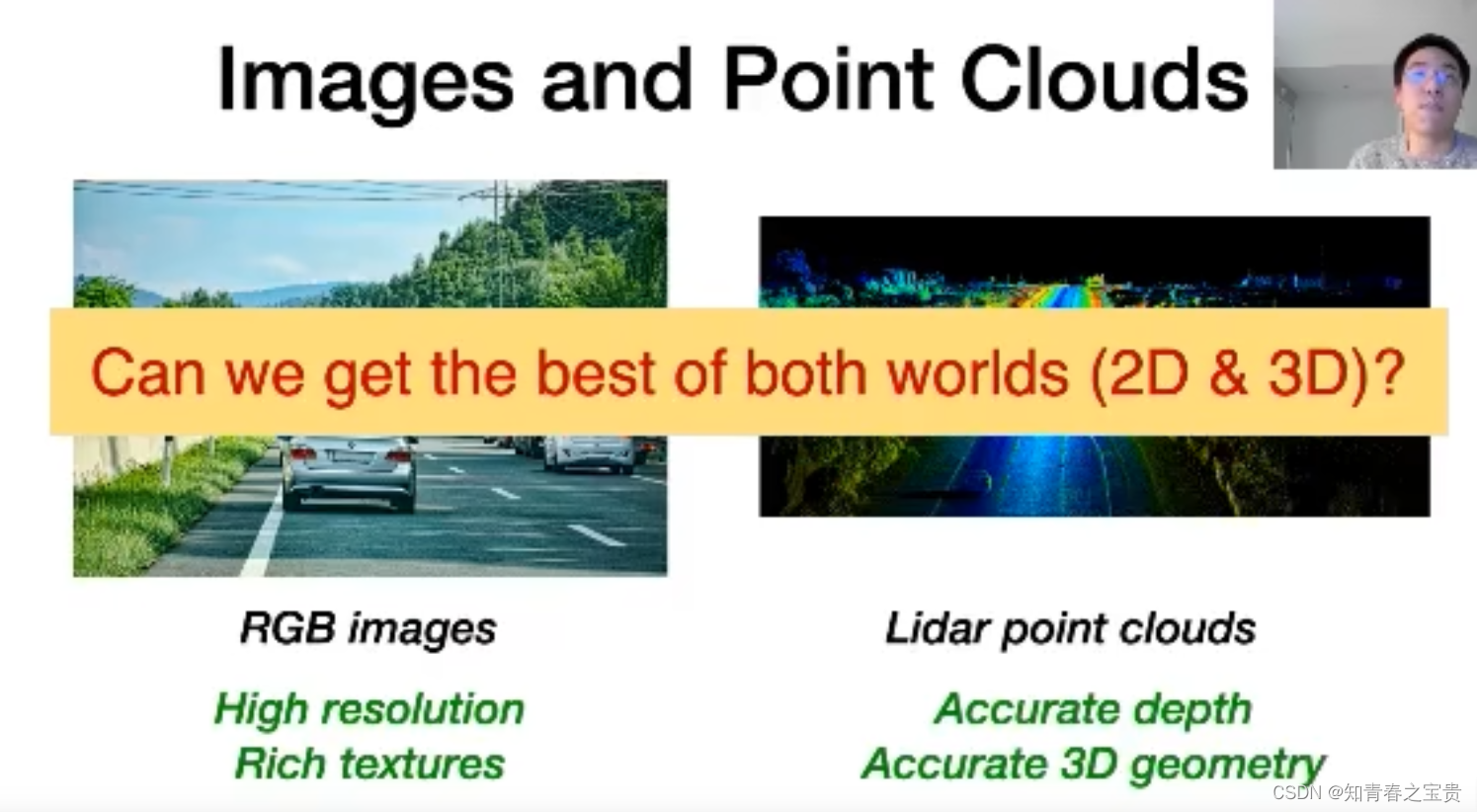
将图像和点云结合的思路。
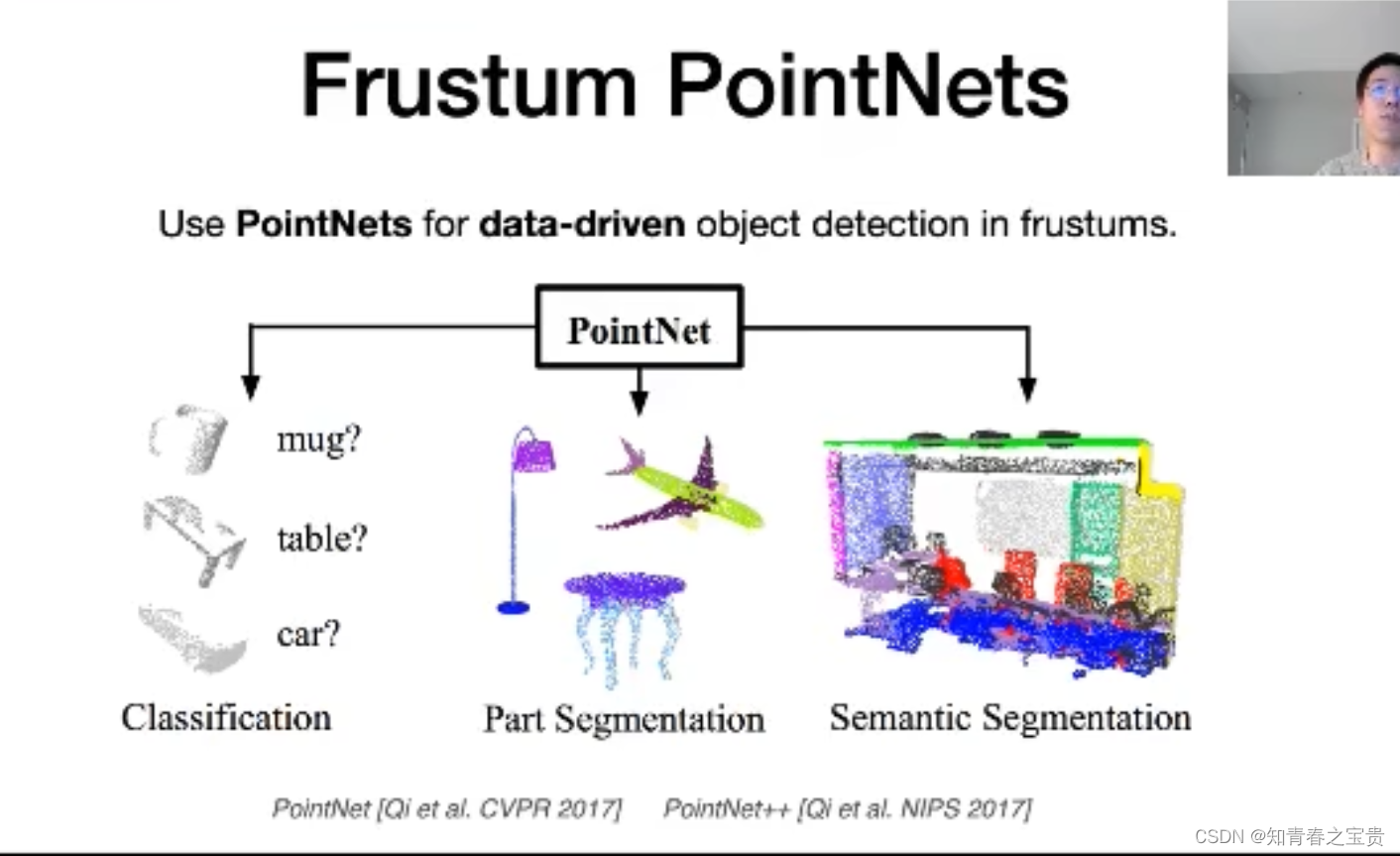
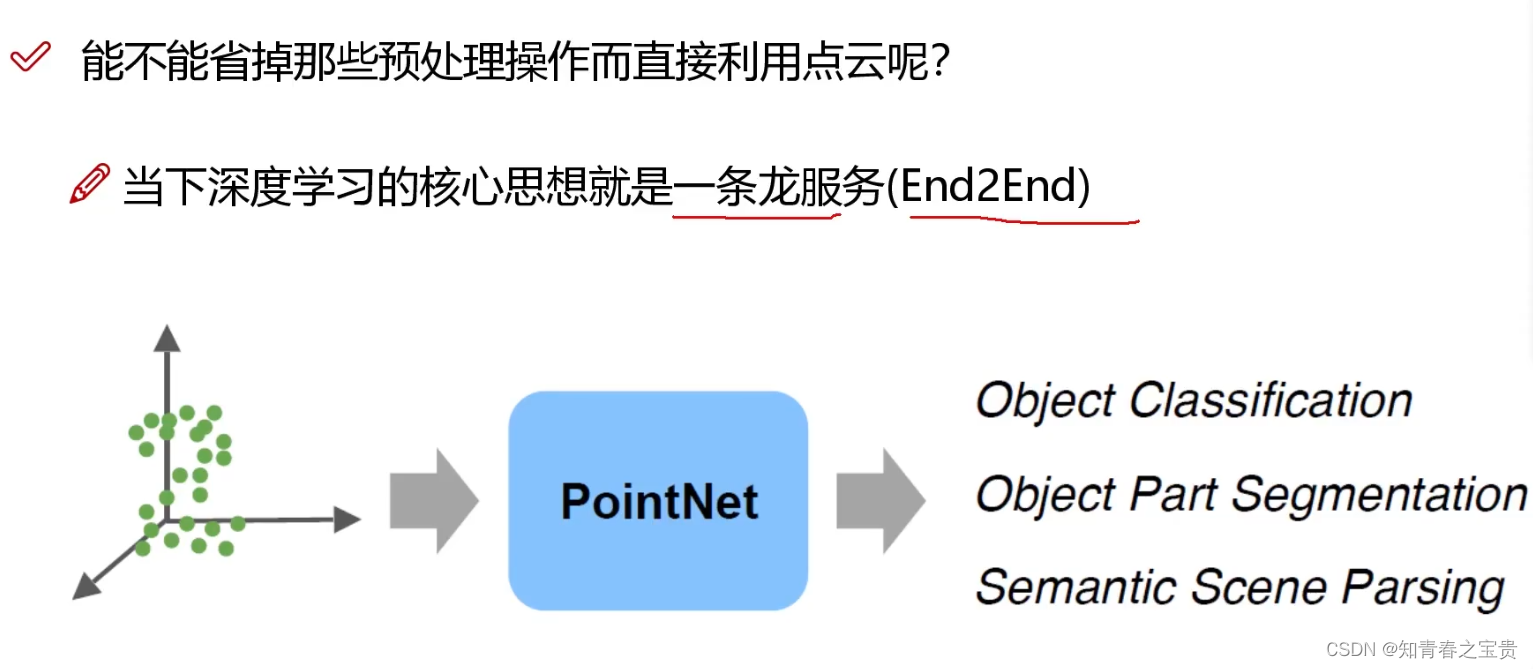
pointnet,不需要把图像网格化,做分类和分割都可以。
3D目标检测,陈晓智。?。
rpn,在物体中心产生proposal。
3D目标检测未来研究方向 —— 52分钟
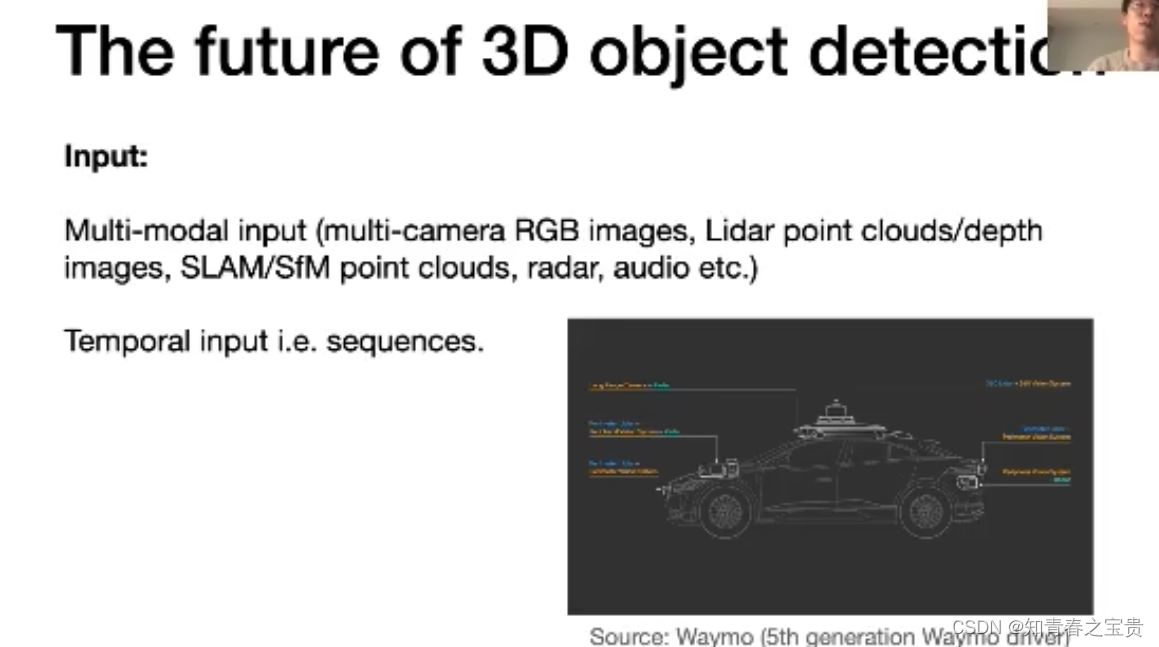
1,从输入端考虑,多模态的输入 ,可能还需要更多的研究。如何结合不同传感器的感知信息,实现更好的检测效果。空间维度和时间维度上的考量。
2,从交叉学科,从机器学习的角度来看3D目标检测。半监督学习,自监督学习。弱监督学习。
多任务学习。(同时做好几个任务,)
持续学习,(中间加入新的东西,还可以继续保持)
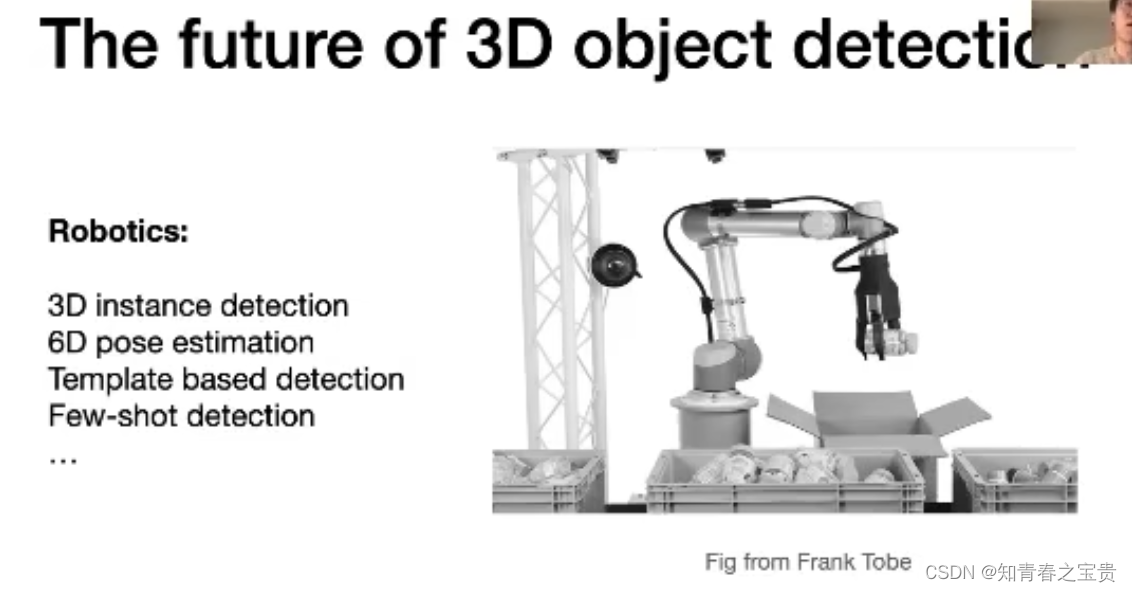
3,在机器人领域,识别小零件。
图像的生成,不是一下子生成的,他是有一个shuttle。这是一个成熟的工程问题。
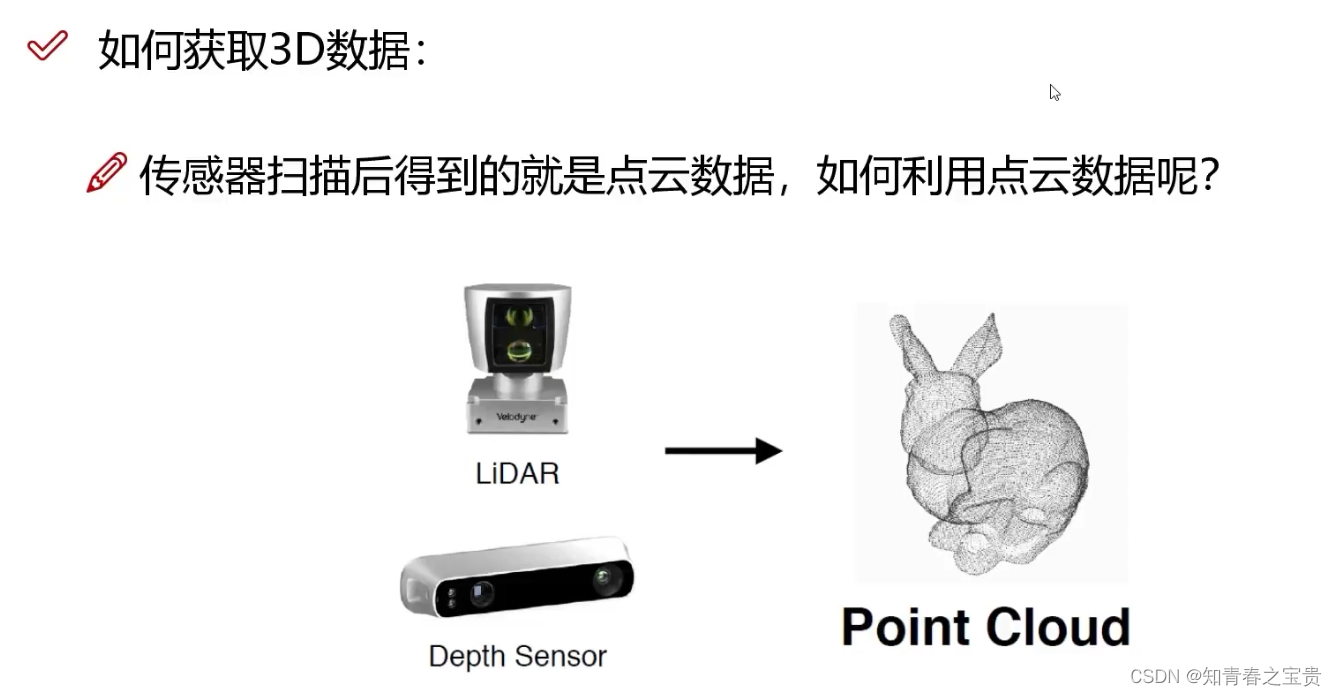
其实lidar生成的不是点云,而是深度图像,
科研经历:1小时5分后。
提出好的问题占一半,数据和matric处理好,模型占比25%。
所以,还是我的观点,做事情,需要非常注意方法论。
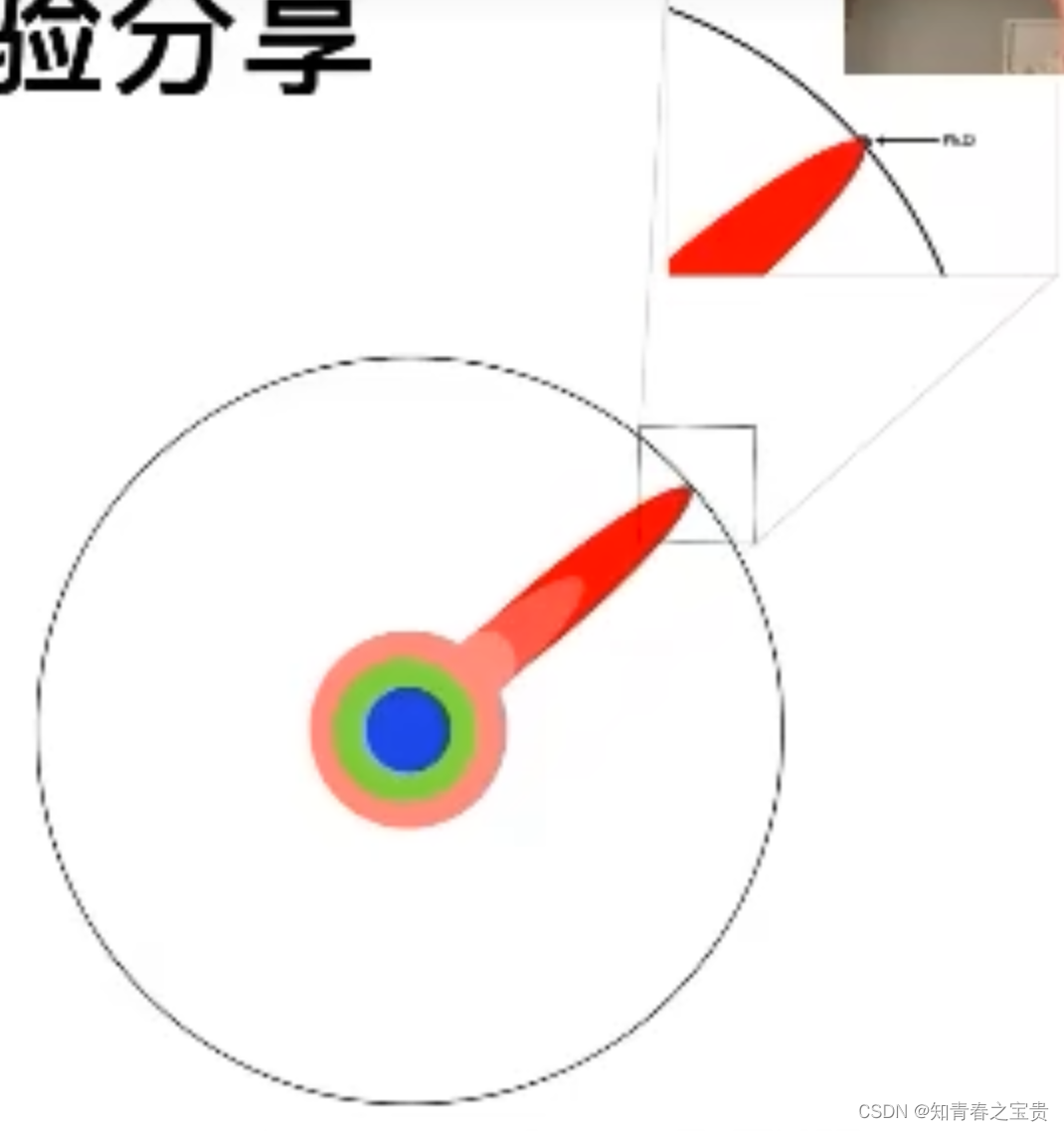
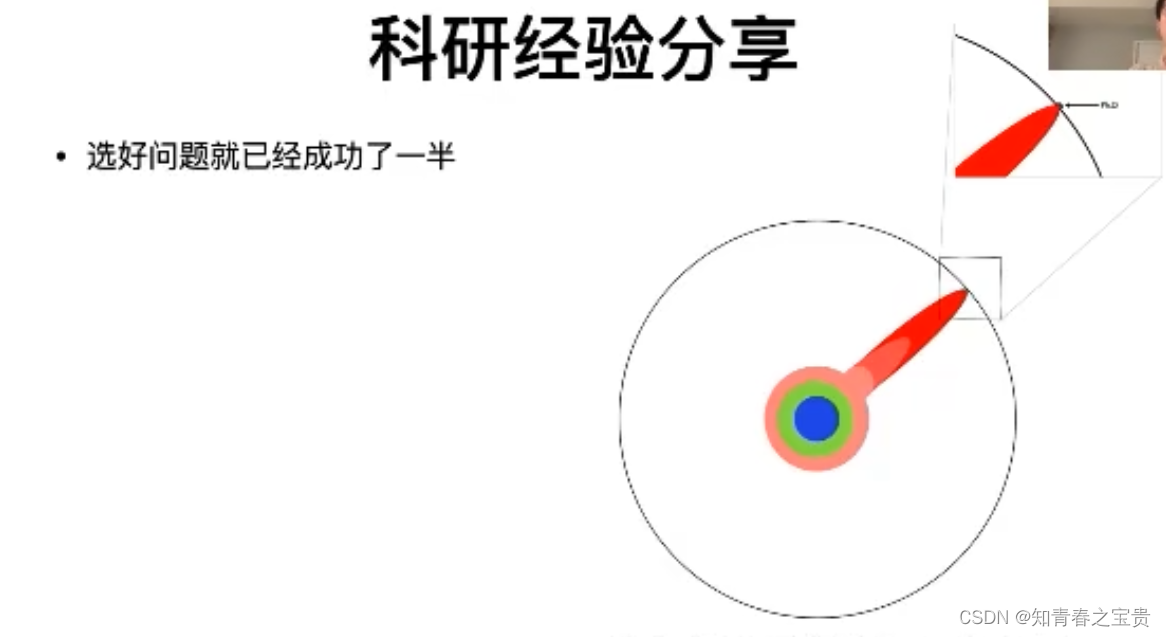
这个图很有意思啦,
需要找到一个方向,这个方向,即是目前在你能力范围内的,也是现有条件支持的。这个探索的边界又不能是无底洞。
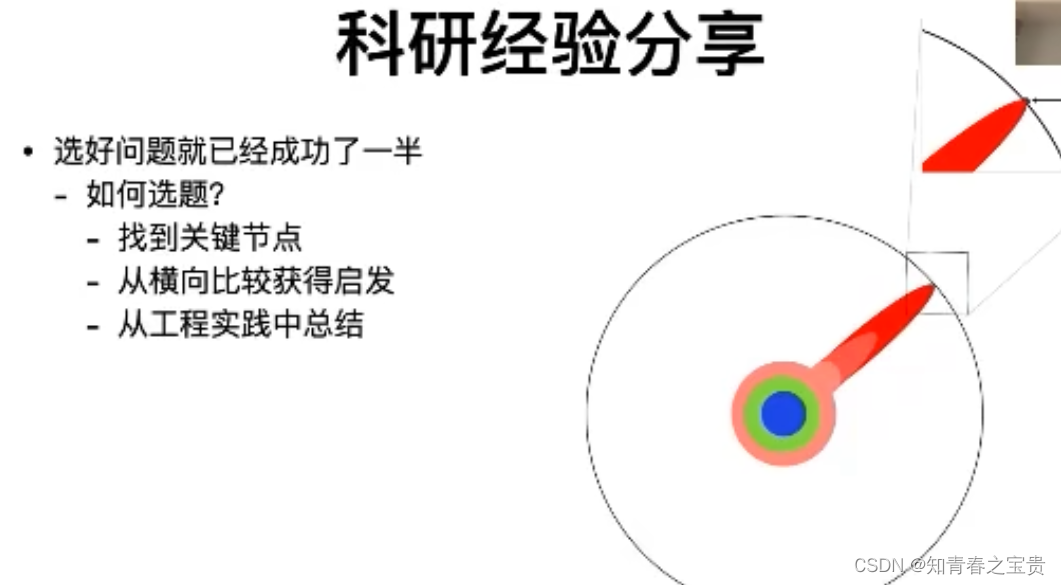
1, 找到关键节点:机器人,特定物体检测算法,是空白的。
尽早的发现,在技术相对成熟的时候,进入这个领域。成为在这个boundary上突破的人啦。
2、横向比较,2D和3D,nlp和图像等对比。
3、从工程中总结,——鼓励大家去好的公司实习。
4、快速调整方向,创新度不够高或者太难了,不好出成果。不要在一个坑上死磕。
5,在项目经历中积累未来的选题
小结:选题是博士或者研究员最重要的一个能力。只要题目合理,总能做出成绩。

科研需要布局, 怎么让项目越做越宽。

追求简约。又简约,又可以work。
做3D检测的话,waymo的目标检测是一个更优的选择。
尽量从实际出发,找到一些应用点。
而不是将一些比较高大上的科技,比如GNN,transform等,在这上面修修改改,提升0.5个百分点。这样的work在审稿的角度来说是比较危险的。
3D点云,重建。可做的方向。
项目的话,3到4个月的周期是比较合适的。
论文投稿后有很多工作要做。
3D目标检测是一个红海,大类的目标检测,目前已有的算法是比较强了,可提升的空间比较有限。可以换一下角度,比如多模态的,或者基于时序的。
避免与红海的方法去比拼,看大的实验室有没有提出什么新坑。
slam的输出,成为感知算法的输入,这个方向研究的比较少。















 1111
1111











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









