







基于遗传算法的机器人路径规划
ga机器人路径规划算法
内涵详细的代码注释
ID:955714811487458
保利龙小叮当
基于遗传算法的机器人路径规划
近年来,机器人技术的应用范围越来越广泛,其中机器人路径规划是一个重要的研究领域。在实际生产和生活中,机器人需要能够自主选择最优路径,在复杂的环境中完成任务。为了提高机器人路径规划的效率和准确性,研究者们提出了各种不同的算法和方法。其中,基于遗传算法的机器人路径规划算法因其优良的搜索能力和适应性而备受关注。
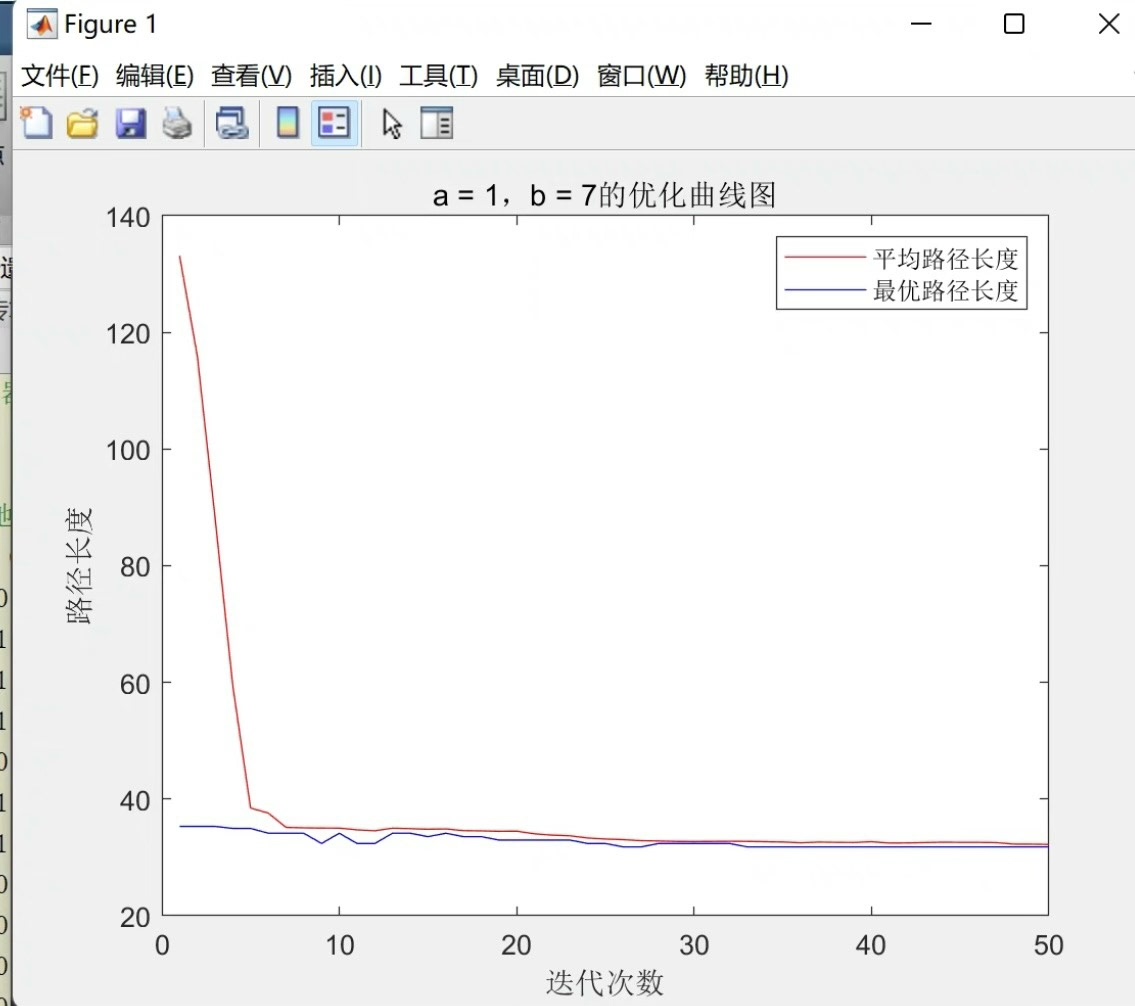
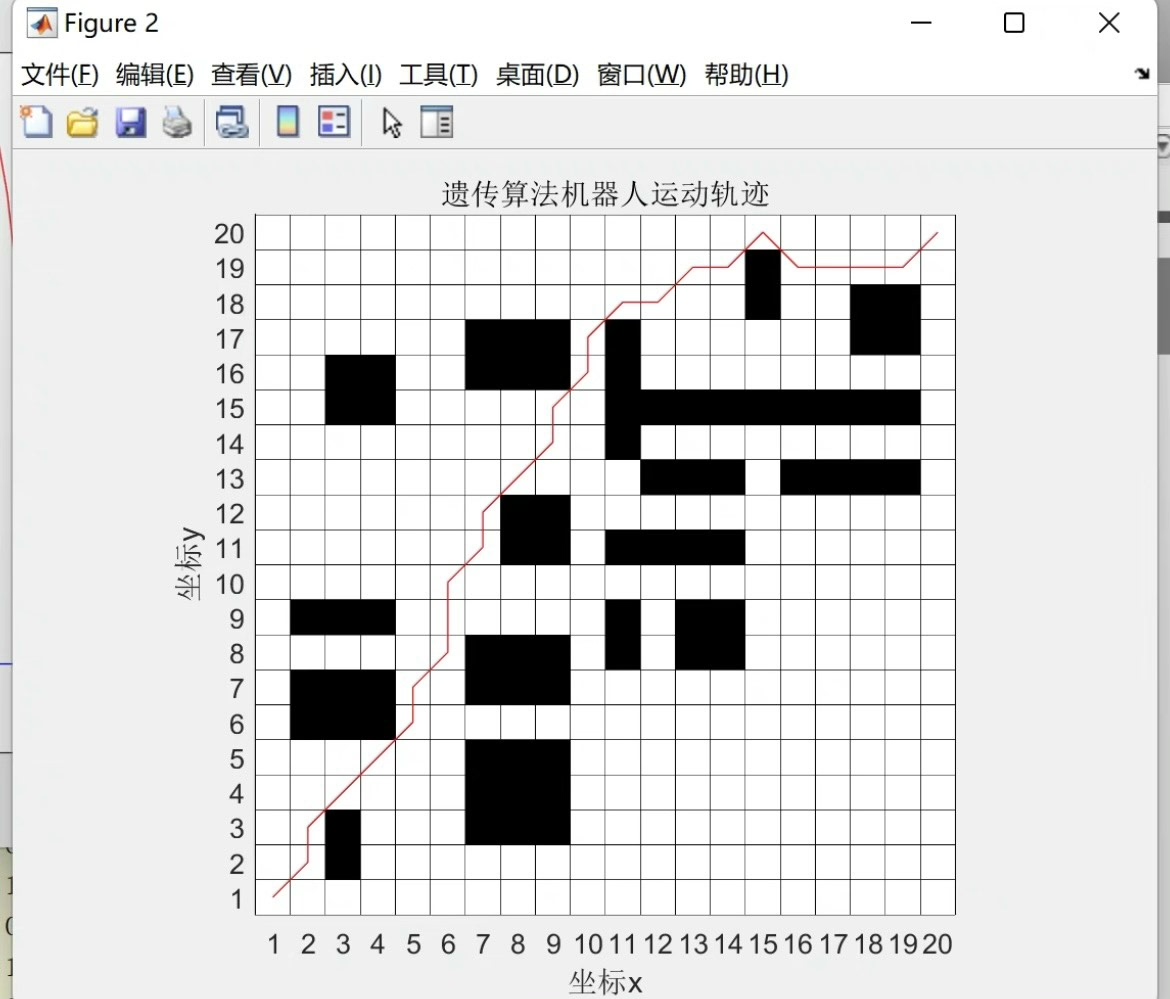
遗传算法是一种模仿自然选择和遗传的优化算法。它通过模拟生物进化过程中的基因组合、交叉和变异等操作,来搜索问题的最优解。在机器人路径规划中,遗传算法可以被用来寻找最短路径或者避开障碍物的路径。
在基于遗传算法的机器人路径规划中,首先需要定义适应度函数,该函数用于评估每条路径的优劣。适应度函数可以根据实际需求和场景进行定义&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









